一种自走式焊接机器人的制作方法
1.本发明涉及建筑施工领域,特别是涉及一种自走式焊接机器人。
背景技术:
2.随着预制管桩端头拼接焊的自动焊接设备的需求增大,一般采用管桩焊接机器人进行焊接操作,管桩焊接机器人包括焊接机器人、钢带轨道、控制箱、及焊接必备设备如焊机和送丝机等。
3.为了进一步改善焊接机器人的焊接前准备工作,特别是在施工现场或工厂完成一个拼接焊工位以后,需要更换一个工位继续进行焊接作业的时候,焊接机器人的移动,焊接机器人相应的配套件如焊机、送丝机等的移动,甚至气瓶的移动或者临时另接气瓶,这些都影响了焊接前准备工作的工作效率。在基建工地现场如此糟糕的情况下,为了方便设备的移动,需要将焊机、送丝机、焊接机器人及其控制箱集中放在一起,但即使集中放在一起了,整个设备也会显得很笨重,普通的推车也很难在基建工地上推动,施工周期长、效率低。
技术实现要素:
4.本发明的目的在于,提供一种自走式焊接机器人,以实现便于焊接设备的整体移动,提高焊接效率。
5.为解决上述技术问题,本发明提供一种自走式焊接机器人,包括:
6.履带式底盘、操作台、钢带轨道及快速卡扣装置;
7.所述履带式底盘包括履带底盘主体,所述履带底盘主体上设有驱动机构,所述驱动机构驱动所述履带底盘主体沿地面方向移动;
8.所述操作台可拆卸安装在所述履带式底盘上,用于收纳焊接工具;
9.所述快速卡扣装置设置在所述操作台远离履带式底盘的一个表面上,用于固定所述钢带轨道。
10.进一步的,所述驱动机构包括:
11.发动机及底盘移动控制器;
12.所述发动机包括汽油发动机或电动机,所述发动机与所述履带底盘主体传动连接;
13.所述底盘移动控制器设置在所述履带底盘主体上,用于控制所述发动机的启停。
14.进一步的,所述底盘移动控制器内部设置有无线连接模块,所述无线连接模块通过天线无线连接有遥控器,所述天线设置在所述操作台上。
15.进一步的,所述无线连接模块包括nfc单元、蓝牙单元、红外线单元、wifi单元或通信单元中的任一种或多种组合。
16.进一步的,所述操作台外壁上设置有活动门,所述操作台内腔内设置有工业电脑、手柄、手柄线、送丝机、焊接小车、焊接小车电源线、气瓶管线、焊机、焊枪线及控制箱,所述操作台外侧设置有气瓶,所述气瓶的阀门与所述气瓶管线端部连接。
17.进一步的,所述气瓶底部设置有气瓶支座,所述气瓶支座固定安装在所述操作台外壁上;
18.所述气瓶外壁上还套设有管夹,所述管夹可拆卸安装在所述操作台外壁上。
19.进一步的,所述操作台外壁上还设置有警示灯。
20.进一步的,所述快速卡扣装置包括竖直设置在所述操作台外壁上的导轴支座,所述导轴支座外壁上贯穿滑动连接有滑块,所述滑块上转动连接有连杆,所述连杆远离所述滑块的一端转动连接有调节握把,所述调节握把的端部转动安装在所述导轴支座上。
21.进一步的,所述滑块设置为l型。
22.相比于现有技术,本发明至少具有以下有益效果:设置驱动机构驱动履带式底盘,使得履带式底盘带动操作台进行移动,在操作台内集成多种焊接工具,有利于焊接设备的管理,减少了焊接操作的时间,提高焊接效率。
附图说明
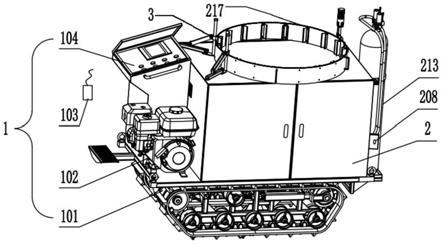
23.图1为本发明一个实施例中外部结构示意图;
24.图2为本发明一个实施例中操作台内部结构的一个视角图;
25.图3为本发明一个实施例中操作台内部结构的另一视角图;
26.图4为本发明一个实施例中快速卡扣装置整体结构示意图。
具体实施方式
27.下面将结合示意图对本发明的自走式焊接机器人进行更详细的描述,其中表示了本发明的优选实施例,应该理解本领域技术人员可以修改在此描述的本发明,而仍然实现本发明的有利效果。因此,下列描述应当被理解为对于本领域技术人员的广泛知道,而并不作为对本发明的限制。
28.在下列段落中参照附图以举例方式更具体地描述本发明。根据下面说明和权利要求书,本发明的优点和特征将更清楚。需说明的是,附图均采用非常简化的形式且均使用非精准的比例,仅用以方便、明晰地辅助说明本发明实施例的目的。
29.如图1所示,本发明实施例提出了一种自走式焊接机器人,包括:
30.履带式底盘1、操作台2、钢带轨道217及快速卡扣装置3;
31.所述履带式底盘1包括履带底盘主体101,所述履带底盘主体101上设有驱动机构,所述驱动机构驱动所述履带底盘主体101沿地面方向移动;
32.所述操作台2可拆卸安装在所述履带式底盘1上,用于收纳焊接工具;
33.所述快速卡扣装置3设置在所述操作台2远离履带式底盘1的一个表面上,用于固定所述钢带轨道217。
34.设置履带式底盘1,在驱动机构的驱动下,带动操作台2进行移动,在操作台2内收纳焊接工具,以便进行焊接操作;在操作台2上设置钢带轨道217,用于辅助焊接操作,且设置快速卡扣装置3实现对钢带轨道217的定位,保持钢带轨道217的稳定,以提高焊接效率。
35.以下列举所述自走式焊接机器人的较优实施例,以清楚的说明本发明的内容,应当明确的是,本发明的内容并不限制于以下实施例,其他通过本领域普通技术人员的常规技术手段的改进亦在本发明的思想范围之内。
36.所述驱动机构包括:
37.发动机102及底盘移动控制器104;
38.所述发动机102包括汽油发动机或电动机,所述发动机102与所述履带底盘主体101传动连接;
39.所述底盘移动控制器104设置在所述履带底盘主体101上,用于控制所述发动机102的启停。在本实施方式中,履带底盘主体101通过发动机102进行驱动,实现前进或后后退;可通过底盘移动控制器104控制发动机102的启停,控制履带底盘主体101的移动。
40.所述底盘移动控制器104内部设置有无线连接模块,所述无线连接模块通过天线215无线连接有遥控器103,所述天线215设置在所述操作台2上。在本实施方式中,可通过天线215及无线连接模块的配合,使遥控器103与底盘移动控制器104连接,通过遥控器103对底盘移动控制器104进行控制,控制履带底盘主体101的移动。
41.所述无线连接模块包括nfc单元、蓝牙单元、红外线单元、wifi单元或通信单元中的任一种或多种组合。在本实施方式中,设置无线连接模块包括nfc单元、蓝牙单元、红外线单元、wifi单元或通信单元中的任一种或多种组合。
42.请参考图2及图3,所述操作台2外壁上设置有活动门208,所述操作台2内腔内设置有工业电脑201、手柄203、手柄线202、送丝机204、焊接小车205、焊接小车电源线206、气瓶管线207、焊机210、焊枪线209及控制箱211,所述操作台2外侧设置有气瓶213,所述气瓶213的阀门与所述气瓶管线207端部连接。在本实施方式中,在操作台2内集成多种焊接工具,便于焊接操作。
43.所述气瓶213底部设置有气瓶支座212,所述气瓶支座212固定安装在所述操作台2外壁上;
44.所述气瓶213外壁上还套设有管夹214,所述管夹214可拆卸安装在所述操作台2外壁上。在本实施方式中,通过气瓶支座212以及管夹214的配合,实现对气瓶213的安装固定,且管夹214可拆卸安装,便于更换气瓶213。
45.所述操作台2外壁上还设置有警示灯216。在本实施方式中,设置警示灯216,可在发生异常情况时,发出警报。
46.请参考图4,所述快速卡扣装置3包括竖直设置在所述操作台2外壁上的导轴支座301,所述导轴支座301外壁上贯穿滑动连接有滑块302,所述滑块302上转动连接有连杆303,所述连杆303远离所述滑块302的一端转动连接有调节握把304,所述调节握把304的端部转动安装在所述导轴支座301上。在本实施方式中,通过按压调节握把304,在连杆303的作用下,使滑块302沿导轴支座301的长度方向上下滑动,实现对钢带轨道217的固定或松开。
47.所述滑块302设置为l型。在本实施方式中,设置滑块302为l型,使滑块302可卡住钢带轨道217,避免钢带轨道217发生偏位。
48.具体的说,钢带轨道217的取放过程及焊接过程分别为:
49.实施例一:
50.钢带轨道217的取放过程为:钢带轨道217安放到操作台2的顶部时,贴近快速卡扣装置3,抬起装置的调节握把304,使得滑块302沿导轴支座301长度方向向上滑动,调整好钢带轨道217的位置,并使其贴紧导轴支座301,这个时候再按压调节握把304,使得滑块302向
下滑动,卡紧钢带轨道217并将其固定;取用钢带轨道217时,抬起调节握把304,滑块302沿着导轴支座301的导轴向上移,超过钢带轨道217的高度时,可将钢带轨道217取出。
51.实施例二:
52.自走式焊接机器人的焊接过程为:装置整体通过履带底盘主体101移动到现场进行焊接作业时,接好电线,通上电后,将钢带轨道217取下来并箍在管桩上扣紧后,从操作台2内取出焊接小车205并安装在钢带轨道217上,接好焊接小车电源线206和焊枪线209,再从操作台2前边左侧取出手柄203对焊接小车205进行操控和焊接;焊接完成后,焊接小车205放回到原来的位置,包括焊接小车电源线206、焊枪线209、手柄203和手柄线202,再将钢带轨道217放回操作台2的顶部,使快速卡扣装置3卡紧钢带轨道217即可。
53.综上所述,设置驱动机构驱动履带式底盘1,使得履带式底盘1带动操作台2进行移动,在操作台2内集成多种焊接工具,有利于焊接设备的管理,减少了焊接操作的时间,提高焊接效率。
54.显然,本领域的技术人员可以对本发明进行各种改动和变型而不脱离本发明的精神和范围。这样,倘若本发明的这些修改和变型属于本发明权利要求及其等同技术的范围之内,则本发明也意图包含这些改动和变型在内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1