手持式工具机和用于激活手持式工具机的驱动马达的方法与流程
1.本发明涉及一种手持式工具机、尤其螺钉机,该手持式工具机具有工具接收部和壳体,在壳体中布置有用于驱动从动轴的驱动马达,其中,在工具接收部的脱耦位态中,从动轴与工具接收部间隔开地布置,并且在工具接收部的耦合位态中,通过尤其沿着驱动马达的转动轴线朝向待加工的工件加载工具接收部,使从动轴与工具接收部通过联接器作用连接,其中,在所述耦合位态中,朝向马达开关加载操纵棒,以激活驱动马达,其中,马达开关沿着驱动马达的转动轴线布置在驱动马达与联接器之间。
背景技术:
2.由现有技术已知这类构造为螺钉机的手持式工具机。螺钉机在壳体中具有用于驱动配属的工具接收部的驱动马达。通过朝向待加工的工件加载布置在工具接收部中的插入式工具来激活驱动马达或者说配属于驱动马达的切换元件。为了操纵切换元件,在工具接收部的中央的内部接收部中布置有操纵棒。
技术实现要素:
3.本发明涉及一种手持式工具机、尤其螺钉机,该手持式工具机具有工具接收部和壳体,在壳体中布置有用于驱动从动轴的驱动马达,其中,在工具接收部的脱耦位态中,从动轴与工具接收部间隔开地布置,并且在工具接收部的耦合位态中,通过尤其沿着驱动马达的转动轴线朝向待加工的工件加载工具接收部,使从动轴与工具接收部通过联接器作用连接,其中,在所述耦合位态中,朝向马达开关加载操纵棒,以激活驱动马达,其中,马达开关沿着驱动马达的转动轴线布置在驱动马达与联接器之间。操纵棒至少局部地在壳体上沿着壳体引导。
4.因此,本发明能够提供一种手持式工具机,在该手持式工具机中,通过在壳体上至少局部地沿着引导操纵棒,能够实现在耦合位态中的驱动马达的安全且可靠的激活。
5.优选地,操纵棒通过滑件与工具接收部连接。
6.因此,能够通过简单的方式在耦合位态中实现对马达开关的操纵,并且在脱耦位态中实现操纵棒与马达开关间隔开。
7.滑件优选通过轴承元件与工具接收部旋转脱耦。
8.因此,能够实现滑件与工具接收部的容易且不复杂的旋转脱耦。
9.根据一种实施方式,滑件具有接收部,用于接收操纵棒的面向工具接收部的端部。
10.因此,能够实现操纵棒在滑件上的安全且可靠的布置。
11.优选地,滑件具有定位接片,其中,该定位接片构造用于将滑件以抗扭转的方式定位在壳体中。
12.因此,能够通过简单的方式实现滑件在壳体中的抗扭转。
13.优选地,联接器具有与工具接收部连接的第一联接器部件以及与从动轴连接的第二联接器部件,其中,第一和第二联接器部件在耦合位态中相互配合,并且在脱耦位态中沿
着驱动马达的转动轴线相互间隔开。
14.因此,能够通过朝向待加工的工件加载工具接收部安全且可靠地实现驱动马达的激活。
15.滑件优选布置在第一联接器部件的外周缘上。
16.因此,能够通过简单的方式实现滑件的适合的布置。
17.根据一种实施方式,操纵棒的面向马达开关的端部在脱耦位态中与马达开关间隔开,并且在耦合位态中通过力加载激活马达开关。
18.因此,能够以容易且不复杂的方式实现手持式工具机的自动启动模式。
19.优选地,联接器构造为分离联接器、尤其是爪式联接器。
20.因此,能够提供稳健且稳定的联接器。
21.此外,本发明提供一种用于激活手持式工具机的驱动马达的方法。该方法具有下述步骤:
22.激活手持式工具机的操作元件,
23.通过手持式工具机的自动启动单元的操作元件激活自动启动模式,并且
24.朝向待加工的工件加载手持式工具机的工具接收部,其中,使从动轴的联接器部件通过沿着驱动马达的转动轴线的运动与工具接收部的联接器部件作用连接,由此,操纵棒沿着驱动马达的转动轴线移动并且激活马达开关。
附图说明
25.根据在附图中示出的实施例在以下说明中更详细地阐述本发明。其示出了:
26.图1根据本发明的手持式工具机的透视图,该手持式工具机具有激活单元,该激活单元具有自动启动单元,
27.图2在图1的手持式工具机的壳体打开的情况下图1的自动启动单元的俯视图,该自动启动单元具有在脱耦位态中的联接器,
28.图3具有图2的联接器的自动启动单元的放大视图,
29.图4图2的具有在耦合位态中的联接器的自动启动单元的放大视图,和
30.图5具有图2至图4的联接器的联接器部件的自动启动单元的透视图。
具体实施方式
31.在附图中,具有相同的或者类似的功能的元件设有相同的附图标记,并且仅详细说明一次。
32.图1示出具有壳体110的手持式工具机100,该手持式工具机示例性地构造为螺钉机、尤其构造为干式建筑螺钉机(trockenbauschrauber)。壳体110优选构造为手枪形,该壳体具有手柄105,该手柄将示出性地在上方的壳体区段106与示出性地在下方的壳体区段108连接。上方的和下方的壳体区段106、108示出性地至少几乎彼此平行并且与手柄105垂直。在上方的壳体区段106中优选布置有驱动单元125,在下方的壳体区段108上优选布置有蓄电池组190。
33.应指出的是,手持式工具机100也能够构造为不具有下方的壳体区段108,其中,蓄电池组190能够至少区段式地布置在手柄105中。替代于此地,也能够设置例如用于依赖于
电网的电流供应的电缆,而不是通过蓄电池组190的独立于电网的电流供应。
34.手柄105示例性地配属有操作元件107,以激活驱动单元125。另外,可选地在手柄105上设置有锁定元件186,该锁定元件构造用于使操作元件107在操作之后锁定或者说封锁在配属的运行位置中。此外,示出性地设置有旋转方向开关188,该旋转方向开关构造用于激活驱动单元125的旋转方向或者说驱动单元125的可逆运行。
35.驱动单元125优选具有至少一个驱动马达120。示出性地,驱动马达120的转动轴线109构成壳体110的、尤其是上方的壳体区段106的纵向方向103。
36.根据一种实施方式,驱动单元125配属有至少一个联接器132。可选地,驱动单元125能够配属有传动单元130。可选的传动单元130包括例如传动器134、尤其是行星齿轮传动器。
37.传动单元130和驱动马达120优选沿着纵向方向103或者说在轴向方向上布置。一般来说,在本说明书中,术语“轴向”或者“在轴向方向上”应理解为沿着壳体110的纵向方向103的方向、尤其是同轴于或者平行于驱动马达120的转动轴线109的方向。
38.驱动马达120优选构造用于驱动工具接收部140。工具接收部140优选配属有用于接收插入式工具的内部接收部,该插入式工具例如是螺钉机批头或者钻头。尤其是,驱动马达120优选驱动从动轴(图2中的295),该从动轴又驱动与工具接收部140连接的驱动轴(图2中的298)。
39.沿着转动轴线109优选在工具接收部140与驱动马达120或者说与可选的传动单元130之间布置有可选的扭矩调节套筒145。扭矩调节套筒145优选构造用于调节扭矩。
40.此外,沿着转动轴线109示出性地在驱动马达120、尤其从动轴(图2中的295)与工具接收部140之间布置有联接器132。根据一种实施方式,联接器132构造为分离联接器、尤其是爪式联接器
41.在工具接收部140的脱耦位态(图2中的201)中,从动轴(图2中的295)与工具接收部140间隔开地布置,而在工具接收部140的耦合位态(图4中的301)中,工具接收部140与从动轴(图2中的295)作用连接。通过尤其是沿着转动轴线109朝向待加工的工件加载工具接收部140,使工具接收部140布置在耦合位态(图4中的301)中。
42.优选地,在耦合位态(图4中的301)中,通过激活单元185激活驱动马达120。优选地,激活单元185配属有手持式工具机100的自动启动单元150。
43.为了通过自动启动单元150激活手持式工具机100的自动启动模式,优选设置有操作单元180。示出性地,操作单元180布置在第二壳体区段108的上侧192上。在此,操作单元180布置得面向第一壳体区段106。但是,操作单元180也能够布置在手持式工具机100的任意其他部位上。
44.操作单元180示出性地具有用于激活自动启动模式的操作元件182。操作元件182优选构造为按键。另外,操作单元180配属有至少用于将自动启动模式的激活可视化的显示器184。为此,显示器184例如能够具有led,该led在自动启动模式激活时发光或者闪光。替代地,也能够通过外部设备、例如智能手机实现自动启动模式的激活。
45.手持式工具机100优选能够在自动启动模式中或者在手动模式中运行。在手动模式中,手持式工具机100的用户操纵操作元件107,由此激活驱动马达120。通过沿着转动轴线109朝向待加工的工件加载工具接收部140,将工具接收部140布置在耦合位态(图4中的
301)中并且工具接收部140转动。
46.为了激活自动启动模式,优选操纵操作元件107,接着通过对操作单元180的操作元件182的操纵来激活自动启动模式。然而在此首先不激活驱动马达120。通过随后沿着转动轴线109朝向待加工的工件加载工具接收部140,将工具接收部140布置在耦合位态(图4中的301)中,由此,操纵棒(图2中的270)激活马达开关(图2中的280)。现在,驱动马达120是激活的且工具接收部140转动。
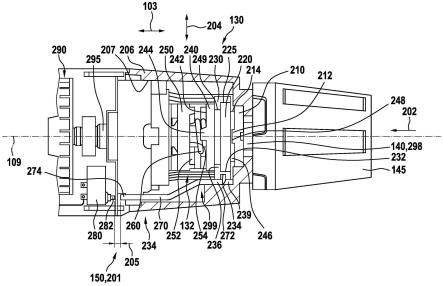
47.图2示出在工具接收部140的脱耦位态201中的图1的手持式工具机100的布置在壳体110中的自动启动单元150。示例性地,自动启动单元150布置在传动器壳体206中。传动器壳体206具有内部接收部207。在此,在内部接收部207中至少布置有具有自动启动单元150的联接器132。
48.优选地,图1的驱动马达120驱动从动轴295。根据一种实施方式,联接器132具有与工具接收部140连接的第一联接器部件240以及与从动轴295连接的第二联接器部件250。优选地,第一联接器部件240与工具接收部140、尤其是与配属于工具接收部140的驱动轴298抗扭地连接,而第二联接器部件250与从动轴295抗扭地连接。
49.第一和第二联接器部件240、250优选分别按照冠状盘的类型构造。在此,第一联接器部件240具有面向第二联接器部件250构造的槽状接收部254和接片形接收元件252。与此类似地,第二联接器部件250具有面向第一联接器部件240构造的槽状接收部242和接片形接收元件244。接收部242、254和接收元件244、252在此布置在第一和第二联接器部件240、250的面向彼此的侧面上。接收部242、254和接收元件244、252在周向方向上优选以均匀分布的方式布置在第一和第二联接器部件240、250上。
50.第一和第二联接器部件240、250优选在耦合位态中(图4中的301)相互配合。在此,第二联接器部件250的接收元件252布置在第一联接器部件240的接收部242中,第一联接器部件240的接收元件244布置在第二联接器部件250的接收部254中。由此构造旋转携动。
51.在图2所示的脱耦位态201中,两个联接器部件240、250沿着转动轴线109相互间隔开。优选地,在第一与第二联接器部件240、250之间布置有弹簧元件260。弹簧元件260构造用于将两个联接器部件240、250加载到脱耦位态201中。在脱耦位态201中,从动轴295与工具接收部140间隔开地布置。在此,不发生经由接收元件244或者说252到工具接收部140的旋转携动。
52.为了在自动启动模式中激活驱动马达120,自动启动单元150配属有操纵棒270。优选能够朝向马达开关280加载操纵棒270。马达开关280布置在自动启动单元150的面向驱动马达120的或者说背离工具接收部140的端部上。优选地,马达开关280沿着转动轴线109布置在驱动马达120与联接器132之间。尤其是,马达开关280布置在可选地面向驱动马达120的风扇叶轮290与自动启动单元150之间。马达开关280具有操纵区段282,用以进行操纵。
53.优选地,操纵棒270构造为棒形,并且具有面向工具接收部140的端部272和面向马达开关280的端部274。操纵棒270至少局部地在壳体110上、尤其是在传动器壳体206的内部接收部207中沿着引导。在此,操纵棒270布置在自由空间299中,该自由空间垂直于转动轴线109或者说在径向方向204上构造在自动启动单元150或者说联接器130与传动器壳体206之间,即操纵棒270在径向方向上布置在工具接收部140之外。
54.在本说明书的上下文中,术语“局部地”应理解为操纵棒270在壳体110上的至少区
段式的布置或者说引导。另外,在本说明书中,术语“径向”或者“在径向方向上”应理解为垂直于壳体110的纵向方向103的方向204、尤其是垂直于驱动马达120的转动轴线109的方向。
55.尤其是,操纵棒270在其端部272、274的区域中优选布置在壳体110或者说内部接收部207中,优选在所述内部接收部处被引导。在图2的脱耦位态201中,操纵棒270的面向马达开关280的端部274沿着转动轴线109以与马达开关280具有间距205的方式布置。
56.另外,自动启动单元150优选配属有滑件230。优选地,操纵棒270通过滑件230与工具接收部140连接。滑件230优选按照空心轮的类型构造。滑件230优选布置在第一联接器部件240的外周缘249上。如上所述,第一联接器部件240布置在工具接收部140上或者说配属于工具接收部140的驱动轴298上。另外,滑件230优选通过轴承元件220与工具接收部140旋转脱耦。为此,在径向方向204上在滑件230与第一联接器部件240之间布置有轴承元件220。在此,轴承元件220的外周缘225布置在滑件230的内周缘232上。为此,优选产生轴承元件220与滑件230之间的力锁合连接。
57.优选地,滑件230具有用于接收操纵棒270的面向工具接收部140的端部272的接收部234。优选地,操纵棒270的端部272在径向方向204上朝向滑件230弯曲,优选弯曲90
°
。优选地,接收部234布置在滑件230的外周缘上。在此,接收部234构造为槽,端部272能够布置在该槽中。优选地,在操纵棒270的端部272与接收部234之间构造有形状锁合的、力锁合的和/或材料锁合的连接。此外,滑件230具有在径向方向204上构造的凸缘236。凸缘236优选构造为用于轴承元件220的停靠元件(anstehelement),使得轴承元件220和/或滑件230朝向从动轴295沿着纵向方向103止动在第一联接器部件240上。
58.此外,滑件230示出性地具有定位接片239。定位接片239优选构造为在径向方向204上的扩展部。在此,定位接片239优选构造用于将滑件230以抗扭转的方式定位在壳体110中。优选地,定位接片239构造在接收部234的区域中。由此,能够实现操纵棒270的端部272在接收部234中的安全且可靠的布置。端部272优选布置在接收部234中,并且在滑件230与内部接收部207之间保持在位置中。
59.类似地,第一联接器部件240在其与接收部242对置的端部上具有槽状接收区域248和接收区段246。在脱耦位态201中,接收区段246配合到联接器盘210的槽状接收区域214中,而接收区域248配合到联接器盘210的接收区段212中。联接器盘210构造用于相对快速地停止脱耦位态201中的工具接收部140的转动。联接器盘210优选壳体固定地布置。
60.通过朝向待加工的工件加载工具接收部140,在箭头202的方向上朝向驱动马达120移动工具接收部140。在此,两个联接器部件240、250作用连接,并且操纵棒270加载马达开关280,由此激活驱动马达120。在此,操纵棒270同时通过滑件230的或者说第一联接器部件240的在轴向方向上的运动而运动。
61.一般来说,自动启动单元150优选配属有第一联接器部件240、操纵棒270、马达开关280、滑件230以及轴承元件220。
62.图3示出在图2的脱耦位态201中的布置在传动器壳体206中的自动启动单元150。在此,图3示出带有轴承元件220的滑件230在第一联接器部件240上的布置。另外,图3示出操纵棒270在自由空间299中的布置。尤其是,示出操纵棒270的端部272在滑件230的接收部234中的布置。此外,示出滑件230的定位接片239,该定位接片优选布置在接收部234的区域中。
63.图4示出在耦合位态301中图2的布置在传动器壳体206中的自动启动单元150,在该耦合位态中驱动马达120是激活的。在耦合位态301中,联接器132的两个联接器部件240、250是作用连接的。在此,如上所述,第二联接器部件250的接收元件252在轴向方向上布置在第一联接器部件240的接收部242中,而第一联接器部件240的接收元件244布置在第二联接器部件250的接收部254中。通过沿着转动轴线109朝向驱动马达120移动第一联接器部件240,操纵棒270加载马达开关280,即图2和图3的间距205不再存在。此外,第一联接器部件240与联接器盘210间隔开地布置。
64.图5示出图2至图4的具有第一联接器部件240、滑件230以及操纵棒270的工具接收部140。在此,图5示出第一联接器部件240在工具接收部140或者说驱动轴298上的布置。如上所述,在第一联接器部件240的外周缘249上布置有滑件230和轴承元件220。在此,轴承元件220布置在第一联接器部件240的外周缘249的第一区段401上,滑件230布置在第一联接器部件240的外周缘249的第二区段402上。优选地,第一区段401具有比第二区段402较大的直径。此外,第一区段401以远离工具接收部140地指向的方式布置,而第二区段401以面向工具接收部140的方式布置。两个区段401、402优选环绕地构造。
65.在中央区域405上或者说在第一联接器部件240的背离工具接收部140的区域上,优选布置有弹簧元件260。在此,弹簧元件260示出性地定位在驱动轴298的外周缘上。弹簧元件260优选构造为螺旋弹簧。
66.此外,图5示出滑件230的定位接片239。优选地,如上所述,定位接片239构造为径向扩展部。优选地,定位接片239与滑件230构造为一体,但是也能够通过任意的连接、例如粘贴连接紧固在滑件230上。
67.应指出的是,操纵棒270也能够与滑件230构造为一体。另外应指出的是,马达开关280优选构造为切换元件、尤其构造为压力开关或者压力按键。替代于此地,马达开关280和操纵棒270例如能够构造为能够相互接触的接触元件,所述接触元件在贴靠在彼此上时构成与驱动马达120的电连接或者说能够实现驱动马达120的电流供应。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1