基于齿带结构的集成动力系统以及外骨骼机器人的制作方法
1.本发明涉及外骨骼技术领域,具体涉及一种基于齿带结构的集成动力系统以及外骨骼机器人。
背景技术:
2.自20世纪60年代外骨骼开始被研发至今,已由军事领域转向民用市场,多以医疗和工业生产为主要目的,作为帮助工人负荷执行制造、搬运任务的辅助工具,目前正在向负重能力更强、控制力和灵活性能更高的方向研发。目前,大多数国家的科研机构对外骨骼的研究尚处于基础起步阶段,商用产品特别在煤矿作业场景下的产品仍然较少,主要应用领域为军事、民用和医疗。目前外骨骼动力伺服电机动力系统多为齿轮直连或同轴减速形式,整体机构较大较重,应用不够灵活方便。
技术实现要素:
3.本发明的目的是提供一种基于齿带结构的集成动力系统以及外骨骼机器人,能有效解决现有外骨骼动力系统整体机构较大较重,应用不够灵活方便的问题。
4.为解决上述技术问题,本发明采用了以下技术方案:
5.一种基于齿带结构的集成动力系统,包括齿轮减速机构、齿带扭转及动力传输机构以及动力输出机构,所述齿带扭转及动力传输机构包括第一动力传输同步带;所述齿轮减速机构和动力输出机构通过第一动力传输同步带传输动力,所述齿带扭转及动力传输机构控制第一动力传输同步带的旋转和动力传输;
6.所述齿轮减速机构包括伺服电机系统、输入传动轴、第一主动轮、第一从动轮和第二动力传输同步带,伺服电机系统通过输入传动轴输出动力,所述输入传动轴刚性连接第一主动轮,并将动力通过第二动力传输同步带带动第一从动轮,实现一级减速。
7.进一步地,所述齿轮减速机构还包括第一传动轴、第一从动齿轮和第二从动齿轮,所述第一传动轴的一端与第一从动轮刚性连接、另一端与第一从动齿轮刚性连接,所述第一从动齿轮与第二从动齿轮啮合,实现二级、三级减速。
8.进一步地,所述齿轮减速机构还包括第二传动轴和第二主动轮,所述第二从动齿轮的一端与第二传动轴刚性连接、另一端与第二主动轮刚性连接;所述动力输出机构还包括输出传动轴和第二从动轮,所述第二从动轮与输出传动轴刚性连接;所述齿带扭转及动力传输机构还包括扭转固定基座,所述第一动力传输同步带的一端与第二主动轮连接、另一端与第二从动轮连接,第一动力传输同步带的中部设有扭转固定基座,所述扭转固定基座上设有扭转及传动从动轮,所述扭转及传动从动轮控制第一动力传输同步带的扭转和方向,第二从动轮将动力传动到输出传动轴,实现四级、五级减速。
9.同时还公开一种外骨骼机器人,包括上述基于齿带结构的集成动力系统,还包括集成主体背部结构和助力输出腿部结构;所述集成主体背部结构内设有电池模块、为基于齿带结构的集成动力系统供电;所述基于齿带结构的集成动力系统设在所述集成主体背部
结构的下部、为髋部关节运动输出助力;其动力输出机构的输出端与助力输出腿部结构连接,带动助力输出腿部结构旋转。
10.进一步地,所述基于齿带结构的集成动力系统还包括位置控制系统,所述位置控制系统包括相对位置编码系统和绝对位置编码系统,所述伺服电机系统、输入传动轴以及激光读取器及码盘构成所述相对位置编码系统,所述激光读取器及码盘通过固定座与输入传动轴配合;所述输出传动轴以及绝对位置编码器及码盘构成所述绝对位置编码系统,所述绝对位置编码器及码盘通过紧固件与输出传动轴配合;基于齿带结构的集成动力系统通过相对位置编码系统读取电机速度及位置数据,通过绝对位置编码系统读取并判断助力输出腿部结构的位置和速度数据及其推衍数据。
11.进一步地,所述齿轮减速机构通过输入固定基座和轴承固定基座固定在集成主体背部结构上,所述扭转固定基座远离扭转及传动从动轮的一面固定在集成主体背部结构上;所述动力输出机构通过输出固定基座与助力输出腿部结构上端相连。
12.进一步地,所述集成主体背部结构呈t字型、包括主杆和侧杆,所述主杆构成背部主体,侧杆两端部向前侧弯曲构成髋关节主体;所述基于齿带结构的集成动力系统设有两组,且对称设在背部主体和髋关节主体的相接处。
13.更进一步地,所述背部主体的上端对称设有固定背带,髋关节主体前侧设有固定腰带,髋关节主体下方设有臀部固定带,助力输出腿部结构的下端设有腿部固定带;所述固定背带、固定腰带、臀部固定带以及腿部固定带上均设有软包结构。
14.上述技术方案中提供的基于齿带结构的集成动力系统,该集成动力系统包括齿轮减速机构、齿带扭转及动力传输机构以及动力输出机构,其中齿轮减速机构与动力输出机构通过齿带扭转及动力传输机构的动力传输同步带传输动力,动力传输同步带扭转角度通过齿带扭转及动力传输机构的扭转及传动从动轮进行控制;本发明刚性齿轮减速机构、齿带扭转及动力传输机构及动力输出机构配合的机构布局形式,可以实现灵活的动力输入、动力传输、扭矩控制及动力输出机构布局,减小外骨骼产品的侧向尺寸,实现包括穿戴式外骨骼产品在内的产品小型化、轻量化;另外,其系统机构耐冲击性能强,可以提高包括穿戴式外骨骼产内在内产品的耐用性;最后,通过固定上述三个主要组成机构中两个机构的绝对位置,即可灵活布置另一机构的相对位置。
15.同时,本发明还提供一种包括上述基于齿带结构的集成动力系统的外骨骼机器人,其通过在集成主体背部结构内安装两组上述集成动力系统为髋部关节运动输出助力,助力输出腿部结构与集成动力系统的输出端相连,带动助力输出腿部结构转动,予穿戴者在运动、搬运等动作时的综合助力,以达到减少穿戴者在运动、作业过程中机体承受压力,减少或预防肌肉损伤的直接目的,同时可实现保护穿戴者、提高穿戴者耐力及提升作业效率。另外,该外骨骼机器人中的相对位置编码系统和绝对位置编码系统,能够为外骨骼产品整机系统综合助力输出判断提供实时数据信息。
附图说明
16.图1为实施例1基于齿带结构的集成动力系统的整体结构图;
17.图2为实施例1基于齿带结构的集成动力系统背面结构示意图;
18.图3为实施例1基于齿带结构的集成动力系统正面结构示意图;
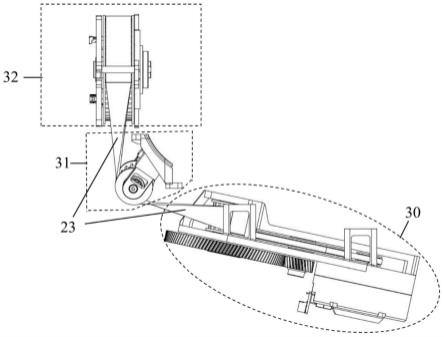
连接、另一端与第二从动轮27连接,第一动力传输同步带23的中部设有扭转固定基座24,扭转固定基座24上设有扭转及传动从动轮25,扭转及传动从动轮25控制第一动力传输同步带23的扭转和方向,第二从动轮27将动力传动到输出传动轴28,实现四级、五级减速。
33.本实施例的基于齿带结构的外骨骼集成动力系统,其刚性齿轮减速机构实现一级、二级、三级减速,其中一级减速中伺服电机系统9通过输入传动轴11输出动力,输入传动轴11刚性连接第一主动轮14,并将动力通过第二动力传输同步带15带动第一从动轮16,第二动力传输同步带15在伺服电机系统9、输入传动轴11与第一主动轮14的电机高转速动力输出中,可减少在一级减速过程中伺服电机系统9、输入传动轴11、第一主动轮14和第一从动轮16 的振动及磨损;
34.另外,二级、三级减速中第一传动轴18的一端与第一从动轮16刚性连接、另一端与第一从动齿轮19刚性连接,第一从动齿轮19与第二从动齿轮20啮合,可实现同轴动力稳定传输的同时实现动力输出齿啮合位置布置灵活布置,实现布局小型化。
35.除此之外,四级、五级减速过程中齿轮减速机构30、动力输出机构32通过第一动力传输同步带23实现动力传输,通过齿带扭转及动力传输机构31实现控制,其机构设置可减少动力输出机构32在动力输出过程中冲击对齿带结构整体的冲击,提高整体机构的抗冲击性和耐用性。齿带扭转后的布局在保证大力矩的输出同时极大的减少人体盆骨,髋关节外侧面的设备突出体积,使得穿戴者可以在更加狭小的空间内使用外骨骼,减少设备和环境之间的磕碰和干涉。
36.本实施例的基于齿带结构的外骨骼集成动力系统,其刚性齿轮减速机构、齿带扭转及动力传输机构及动力输出机构配合的机构布局形式,通过各部分机构分级减速,可以实现灵活的动力输入、动力传输、扭矩控制及动力输出机构布局,相对于传统行星减速机轴向齿轮机构布局较大,基于齿带结构的外骨骼集成动力系统可以减小用其制成的外骨骼产品的侧向尺寸(盆骨和髋关节侧向宽度),实现包括穿戴式外骨骼产品在内的产品小型化、轻量化;且其一级,二级同步轮输出有利于减少齿轮系统的噪音(同步轮带系统冲击比齿轮的要小),适合外骨骼在特殊领域应用的静音要求,末端的四级及五级同步带减速机构设置可提高其系统末端扭矩输出机构的耐冲击性能,同时降低末端输出噪音,可以提高包括穿戴式外骨骼产内在内产品的耐用性。相对于传统谐波减速机机构人体侧面体积空间设置,噪音,结构耐冲击性能和减速机构耐损的性能更高。
37.实施例2
38.本实施例采取的技术方案如图1~10所示,一种外骨骼机器人,包括基于齿带结构的集成动力系统2,基于齿带结构的集成动力系统2,包括齿轮减速机构30、齿带扭转及动力传输机构31以及动力输出机构32,齿带扭转及动力传输机构31包括第一动力传输同步带23;齿轮减速机构30和动力输出机构32通过第一动力传输同步带23传输动力,齿带扭转及动力传输机构31控制第一动力传输同步带23的旋转和动力传输。
39.参考图2和图3,齿轮减速机构30包括伺服电机系统9、输入传动轴11、第一主动轮14、第一从动轮16和第二动力传输同步带15,伺服电机系统9通过输入传动轴11输出动力,输入传动轴11刚性连接第一主动轮14,并将动力通过第二动力传输同步带15带动第一从动轮 16,实现一级减速。齿轮减速机构30还包括第一传动轴18、第一从动齿轮19和第二从动齿轮20,第一传动轴18的一端与第一从动轮16刚性连接、另一端与第一从动齿轮19刚性连
接,第一从动齿轮19与第二从动齿轮20啮合,实现二级、三级减速。齿轮减速机构30还包括第二传动轴21和第二主动轮22,第二从动齿轮20的一端与第二传动轴21刚性连接、另一端与第二主动轮22刚性连接;动力输出机构32还包括输出传动轴28和第二从动轮27,第二从动轮27与输出传动轴28刚性连接;齿带扭转及动力传输机构31还包括扭转固定基座 24,第一动力传输同步带23的一端与第二主动轮22连接、另一端与第二从动轮27连接,第一动力传输同步带23的中部设有扭转固定基座24,扭转固定基座24上设有扭转及传动从动轮25,扭转及传动从动轮25控制第一动力传输同步带23的扭转和方向,第二从动轮27将动力传动到输出传动轴28,实现四级、五级减速。
40.如图4至图7,外骨骼机器人还包括集成主体背部结构1和助力输出腿部结构3;集成主体背部结构1内设有可快速拆装电池模块4(也可通过系统外部直流供电)、为基于齿带结构的集成动力系统供电;基于齿带结构的集成动力系统2设在集成主体背部结构1的下部、为髋部关节运动输出助力;其动力输出机构32的输出端与助力输出腿部结构3连接,带动助力输出腿部结构3旋转;具体地,齿轮减速机构30通过输入固定基座10和轴承固定基座17固定在集成主体背部结构1上,扭转固定基座24远离扭转及传动从动轮25的一面固定在集成主体背部结构1上;动力输出机构32通过输出固定基座26与助力输出腿部结构3上端相连。
41.如图4所示,本实施例的集成主体背部结构1呈t字型、包括主杆和侧杆,主杆构成背部主体,侧杆两端部向前侧弯曲构成髋关节主体;基于齿带结构的集成动力系统2设有两组,且对称设在背部主体和髋关节主体的相接处。背部主体的上端对称设有背带固定软包5,髋关节主体前侧设有腰带固定软包6,髋关节主体下方设有臀部固定软包7,助力输出腿部结构 3的下端设有腿部固定软包8;结合各部分软包结构可与使用者穿戴部位固定舒适稳定。
42.参考图5和图6,输出传动轴28的集成动力系统输出轴连接面33与助力输出腿部结构3 的助力输出腿部结构与集成动力系统连接面34通过法兰配合和紧固件刚性固定连接,从而使集成动力系统2带动助力输出腿部结构3实现腿部助力输出。
43.另外,为了快速获取位置和速度信息,基于齿带结构的集成动力系统2还包括位置控制系统,位置控制系统包括相对位置编码系统和绝对位置编码系统,伺服电机系统9、输入传动轴11以及激光读取器及码盘12构成相对位置编码系统,激光读取器及码盘12通过电机及相对位置编码器固定座13与输入传动轴11配合;输出传动轴28以及绝对位置编码器及码盘 29构成绝对位置编码系统,绝对位置编码器及码盘29通过紧固件与输出传动轴28配合;与动力输入伺服电机系统配合的相对位置编码系统可以获取动力输入电机的速度、位置等信息;与动力输出轴连接配合的绝对编码系统可以获取与之连接的助力输出腿部结构3的速度、位置及其推衍的包括但不限于角速度、关节扭矩等外骨骼控制需要的数据信息。
44.本实施例的外骨骼机器人,除了具备实施例1集成动力系统的特点和优势,其还通过结合系统内各部分软包与使用者穿戴部位固定及相关协动,予穿戴者在运动、搬运等动作时的综合助力,以达到减少穿戴者在运动、作业过程中肌体承受压力,减少或预防肌肉损伤的直接目的,同时实现保护穿戴者、提高穿戴者耐力及提升作业效率。
45.上面结合实施例对本发明的实施方式作了详细说明,但是本发明并不限于上述实施方式,对于本技术领域的普通技术人员来说,在获知本发明中记载内容后,在不脱离本发
明原理的前提下,还可以对其作出若干同等变换和替代,这些同等变换和替代也应视为属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1