优化机械臂关节中心距离和关节运动范围的方法
1.本发明属于机器人优化技术领域,具体涉及一种优化机械臂关节中心距离和关节运动范围的方法。
背景技术:
2.机械臂目前广泛应用于工业生产、生活服务、医疗以及特种领域,尤其是仿人机器人的兴起,更是大大拓宽了机械臂的应用场景。
3.在多自由度机械臂执行操作任务时,工作空间和运动的灵活度是衡量其静态性能的重要指标。当机械臂的主要构型以及自由度的配置设计完成后,影响以上两个指标的机械臂设计参数是机械臂关节旋转中心的距离和关节的运动范围。如果在设计阶段没有依据机械臂的任务类型选用适合的设计参数或者对设计参数的优化不够全面,都可能会导致机械臂无法完成期望的操作任务。对于需要附带其他设备或者在特定的环境下执行操作任务的机械臂,在机械臂的执件到达空间中的任务点的运动过程中,可能会与障碍物或者机械臂本身携带的设备发生碰撞,而避开障碍物会对机械臂的工作范围产生较大的影响。所以在机械臂设计阶段的工作空间分析中,需要考虑因为避免碰撞而发生的参数需求的变化。机械臂的灵活度指标需要考虑空间中每个方向的运动需求,并与工作空间的指标相结合,综合分析设计参数与这两项指标之间的关系,通过基于任务的目标分析,实现对设计参数的优化。
4.传统的设计中,往往忽略对这两种参数的优化,直接通过对极限位置的静态计算得到参数值;或者采用一些优化方式,如先预设参数值,然后经过多次迭代,得到比预设值更优的配置,然而这种方法往往无法得到最优解,同时需要消耗大量时间。
技术实现要素:
5.针对现有技术中存在不足,本发明提供了一种优化机械臂关节中心距离和关节运动范围的方法,以机械臂各关节旋转中心的距离和关节运动范围为设计参数进行优化,可以有效地提升机械臂的运动性能。
6.本发明是通过以下技术手段实现上述技术目的的。
7.优化机械臂关节中心距离和关节运动范围的方法,具体为:
8.基于关节中心距离的初始值l
初
,对机械臂及需要执行的任务进行建模并建立避障控制器;
9.建立综合考虑机械臂工作空间和运动灵活度指标的目标方程;
10.联合所述目标方程和避障控制器,通过优化求解器在预设的初始范围求得关节中心距离的最优解l
优
,机械臂基于所述最优解l
优
执行避障轨迹,得到各个关节实际的运动范围,结合关节的初始范围,确定关节运动范围的最优解θ
优
;所述最优解θ
优
介于关节实际的运动范围与关节运动范围的初始范围之间;
11.所述目标方程为其中u是所有任务点的操纵性参数u组成的向量,wu是以相对应的任务点的操纵性参数的权重值wu组成的对角矩阵,e是机械臂执行器在所有任务点的偏差组成的向量,we是以相对应的任务点的偏差的权重值we组成的对角矩阵。
12.进一步的技术方案,所述预设的初始范围是:
13.l
i min
≤li≤l
i max
14.θ
i min
≤θi≤θ
i max
15.其中:li为第i组关节中心距离,l
imin
为第i组关节中心距离的最小值,l
imax
为第i组关节中心距离的最大值,θi为第i个关节转动范围,θ
imin
为第i个关节转动范围的最小值,θ
imax
为第i个关节转动范围的最大值。
16.进一步的技术方案,所述避障控制器采用二次规划方法进行建立,避障控制器的目标方程为:
[0017][0018]
避障控制器的不等式约束为:
[0019][0020][0021]
其中:为机械臂的目标速度,j
δ
(θ)是机械臂的关节角组成的向量为θ时的雅可比矩阵,λ、ξ均为正系数,是两个发生相互运动的物体之间的雅可比矩阵的转置矩阵,n和dj分别是两物体最近的点之间的单位方向向量和距离,dm是控制器开始产生影响的距离,ds是两物体之间的最小距离,nc为在防碰撞约束范围内的点对的个数。
[0022]
进一步的技术方案,所述最优解l
优
的获取过程为:基于优化求解器单次求解得到的优化值l,达到目标方程的目标值,完成收敛,输出最优解l
优
,否则基于优化求解过程中的优化值l,重新对机械臂以及需要执行的任务进行数学建模并循环优化过程。
[0023]
更进一步的技术方案,所述通过优化求解器在预设的初始范围求得关节中心距离的最优解l
优
的具体过程为:对机械臂设置特定的任务点,通过避障控制器控制手臂执行器到达每个任务点,当机械臂执行器达到任务点时,计算出执行器在该任务点的操纵性参数u和偏差e,当机械臂执行器达到所有任务点后,得到所有任务点的操纵性参数u组成的向量u和所有任务点的偏差e组成的向量e,进而可计算出目标方程的值,通过优化求解器中的全局优化函数得到该次求解循环中的优化值l。
[0024]
进一步的技术方案,所述wu=diag{wu,ε},其中ε是任务点的个数,且wu>0。
[0025]
进一步的技术方案,所述we=diag{we,ε},其中ε是任务点的个数,且we>0。
[0026]
本发明的有益效果为:
[0027]
(1)本发明联合目标方程和避障控制器,在初始范围求得关节中心距离的最优解,机械臂基于最优解执行避障轨迹,在执行避障轨迹中得到的各个关节实际的运动范围,结
合关节运动范围的初始范围,确定关节运动范围的最优解;本发明考虑工作空间中的避障轨迹、关节运动范围以及机械臂执行器的灵活度指标,得到的优化结果更加准确;
[0028]
(2)本发明中的避障控制器能避免奇异点的出现,保证机械臂在避障过程中不会出现奇异位置,使得关节中心距离的最优解也不会出现奇异位置,进一步避免机械臂的雅可比矩阵和操纵性参数无解情况的发生;
[0029]
(3)本发明依据任务需求设置多个任务点,以执行器在每个任务点的偏差(包括位置和姿态偏差)以及操纵性参数为目标方程的参数项,并对每个任务点设置相应的权重;能够根据不同任务点的需求,改变权重大小,精确地模拟任务轨迹。
附图说明
[0030]
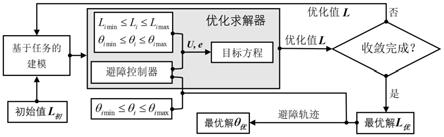
图1为本发明所述优化机械臂关节中心距离和关节运动范围的方法流程图。
具体实施方式
[0031]
下面结合附图以及具体实施例对本发明作进一步的说明,但本发明的保护范围并不限于此。
[0032]
本发明的优化机械臂关节中心距离和关节运动范围的方法,针对的是多自由度的机械臂,其主要组成部分为驱动器和连杆,典型的机械臂的结构是串联型的。当机械臂完成初步的设计,确定了自由度的数量和转轴方向之后,决定工作空间大小和运动灵活度指标的主要影响参数为关节中心之间的距离和每个关节的转动范围。通过基于机械臂的任务需求对这两项设计参数进行优化,可以获得更理想的设计结果。为了使设计参数均能满足两个指标的需求,在优化过程中,需要同步考虑两个指标的需求。
[0033]
对于机械臂工作空间大小的指标,除了机械臂自身的设计参数外,外界因素也会影响其工作空间,如仿人机器人的手臂需要在执行任务时避免碰到自身的躯干,或者工业机械臂的执行器需要装配产品内部,需要避开产品的外壳,这些都会影响机械臂的运动轨迹,从而影响机械臂的工作空间。如果在机械臂设计阶段不充分考虑可能会影响工作空间的这些因素,就可能造成设计的结果不满足使用需求,所以需要基于任务中可能出现的障碍物得到更准确的运动轨迹,进而得到更准确的设计参数。
[0034]
对于机械臂的灵活度,是指机械臂在某一姿势下,其执行器在空间中运动的灵敏度。机械臂的灵活性在机械臂操作任务中非常重要,尤其是针对复杂的操作任务。本发明中选择将机械臂的操纵性参数u作为衡量机械臂灵活度的指标,因为该指标可以从每个方向综合衡量机械臂执行器的灵活度。操纵性参数的表达式为:
[0035][0036]
其中:j是机械臂的雅可比矩阵,m是机械臂执行器的空间自由度,l
sum
是机械臂关节的转动中心之间的距离总和;u的值越大,则说明执行器在机械臂的这个姿势下的灵活度越高。
[0037]
本发明基于任务的需求优化关节转动中心距离以及关节运动范围的具体方法是:
[0038]
(1)根据设计需求,设定关节中心距离以及关节运动范围的初始范围:
[0039]
l
i min
≤li≤l
i max
[0040]
θ
i min
≤θi≤θ
i max
[0041]
其中:li为第i组关节中心距离,l
imin
为第i组关节中心距离的最小值,l
imax
为第i组关节中心距离的最大值,θi为第i个关节转动范围,θ
imin
为第i个关节转动范围的最小值,θ
imax
为第i个关节转动范围的最大值;
[0042]
(2)在设定的初始范围内,随机选择一组关节中心距离作为初始值l
初
(所有初始的关节中心距离组成的向量);
[0043]
(3)基于初始值l
初
,对机械臂以及需要执行的任务进行建模(建模过程参见kanehiro,f.,lamiraux,f.,kanoun,o.,yoshida,e.,laumond,j.-p.:a local collision avoidance method for non-strictly convex polyhedra.in:robotics:science and systems(2008)),建模时对所有可能发生碰撞的物体表面设置避障包覆面;
[0044]
(4)建立避障控制器,保证机械臂在仿真的过程中不发生碰撞
[0045]
避障控制器采用二次规划方法进行建立的,避障控制器的目标方程和不等式约束为:
[0046][0047][0048][0049]
其中:为机械臂的目标速度,j
δ
(θ)是机械臂的关节角组成的向量为θ时的雅可比矩阵,λ、ξ均为正系数,是两个发生相互运动的物体之间的雅可比矩阵的转置矩阵,n和dj分别是两物体最近的点之间的单位方向向量和距离,dm是控制器开始产生影响的距离,ds是两物体之间的最小距离,nc为在防碰撞约束范围内的点对的个数。
[0050]
目标方程的第一项表示手臂末端的速度跟随目标速度,第二项的作用是控制关节的角速度,保证关节速度的连续性;不等式(1)可以保证两个相对运动的物体在距离小于dm时的速度减小并且最小距离不会小于ds;不等式(2)可以保证机械臂在运动轨迹中没有奇异位置出现;不等式(3)可以保证机械臂各关节在预设的运动范围内转动。
[0051]
(5)建立综合考虑工作空间和运动灵活度指标的目标方程:
[0052][0053]
在基于任务的指标分析中,根据任务的需求选取多个任务点,u是所有任务点的操纵性参数u组成的向量,wu=diag{wu,ε}(wu>0)是以相对应的任务点的操纵性参数的权重值wu组成的对角矩阵,ε是任务点的个数,每个任务点wu的值可以根据该点在任务中的重要程度设定;e是机械臂执行器在所有任务点的偏差e(包含位置偏差和姿态偏差)组成的向量,用来判定机械臂执行器是可否到达任务点,即判定机械臂的工作空间;we=diag{we,ε}(we>0)是以相对应的任务点的偏差的权重值we组成的对角矩阵,每个任务点的we值可以根据该点在任务中的重要程度设定。
[0054]
(6)使用优化求解器进行求解,得到最优解
[0055]
联合目标方程和避障控制器,通过优化求解器在预设的初始范围求得关节中心距离的最优解l
优
。优化求解器单次求解过程具体为:对机械臂设置特定的任务点,通过避障控制器控制手臂执行器到达每个任务点,手臂在运动过程中的关节运动范围不超过设置的初始范围。当机械臂执行器达到任务点时,可计算出执行器在该点的操纵性参数u和偏差e,当机械臂执行器达到所有任务点后,可得到所有任务点的操纵性参数u组成的向量u和所有任务点的偏差组成的向量e,进而可计算出目标方程的值,通过优化求解器中的全局优化函数可得到该次求解循环中的优化值l。设置综合考虑工作空间和运动灵活度指标目标方程的目标值,当优化值l达到所述目标方程的目标值时,完成收敛,输出最优解l
优
,否则基于优化求解过程中的优化值l重新对机械臂以及需要执行的任务进行数学建模并循环优化过程。得到关节中心距离的最优解l
优
的值以后,执行避障轨迹得到各个关节实际的运动范围,结合关节的初始范围,确定关节运动范围的最优解θ
优
,具体为:关节运动范围的最优解介于关节实际的运动范围与关节运动范围的初始范围之间。
[0056]
所述实施例为本发明的优选的实施方式,但本发明并不限于上述实施方式,在不背离本发明的实质内容的情况下,本领域技术人员能够做出的任何显而易见的改进、替换或变型均属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1