一种实验用机器人防滑滚轮的制作方法
1.本发明涉及滚轮技术领域,具体为一种实验用机器人防滑滚轮。
背景技术:
2.机器人是一种能够半自主或全自主工作的智能机器,机器人具有感知、决策、执行等基本特征,可以辅助甚至替代人类完成危险、繁重、复杂的工作,提高工作效率与质量,服务人类生活,扩大或延伸人的活动及能力范围。
3.现有技术中,实验用机器人的滚轮结构简单,无法根据需要字形调整滚轮的防滑性能,通常在滚轮外侧直接套设防滑套,比较麻烦,且拆除后需要专门收纳,若不拆卸,在不需要防滑的地面行走阻力大,导致行走能耗大。
技术实现要素:
4.本发明的目的在于提供一种实验用机器人防滑滚轮,以解决上述背景技术中提出的问题。
5.为实现上述目的,本发明提供如下技术方案:一种实验用机器人防滑滚轮,所述实验用机器人防滑滚轮包括:钢圈,钢圈的外侧套设有耐磨环,耐磨环的一端内环口处插接有塞板,塞板的表面设置有连轴套筒,连轴套筒固定在钢圈的表面,塞板的表面设置有螺杆,螺杆的杆体上套设有挤推柄;嵌入槽,开设在连轴套筒的外环面,嵌入槽的内部螺接有连接螺钉,且嵌入槽的内壁开设有插口,插口的内部插接有挡片;及预留孔,贯穿钢圈和耐磨环,预留孔的内部插接有封堵套筒,封堵套筒的外壁上设置有防滑凸起,封堵套筒的内壁设置有牵引柄。
6.优选的,所述耐磨环的另一端内环口设置有防脱环,防脱环的内环口径小于挤推柄的外径,靠近耐磨环一端开口的内壁上设置有加固筋圈。
7.优选的,所述挤推柄的一侧圆环面上开设有多个指槽,挤推柄的另一侧圆环面边缘设置有斜面,斜面将挤推柄的另一端构成圆台凸起。
8.优选的,所述挤推柄的内环面设置有内陆螺纹,内螺纹与螺杆表面的外螺纹配合连接。
9.优选的,所述挡片呈“l”形板状结构,挡片的一端处于边槽中,边槽开设在连轴套筒的外壁上,插口连通嵌入槽和边槽,挡片的另一端和边槽的侧壁之间设置有金属弹片。
10.优选的,所述预留孔设置有多组,多组预留孔沿着耐磨环的外环面等距离等大小排列分布,预留孔的内壁设置有限位环,限位环对牵引柄限位,防止牵引柄摆动,牵引柄伸入钢圈内环口且朝向防脱环的一端设置有斜面。
11.优选的,所述防滑凸起呈台形结构,防滑凸起设置有多个,多个防滑凸起等距布满封堵套筒的表面。
12.优选的,所述封堵套筒和限位环之间设置有弹簧,弹簧套设在牵引柄的外侧。
13.与现有技术相比,本发明的有益效果是:本发明提出的实验用机器人防滑滚轮表面开设多组预留孔,通过旋拧挤推柄沿着螺杆行进,挤推柄从钢圈内环口向外侧顶推牵引柄,如此封堵套筒携带防滑凸起突出预留孔,实现对耐磨环的防滑加强,挤推柄回拧后,弹簧回弹牵引封堵套筒回移至预留孔中;且在嵌入槽的内部插接挡片,挡片被金属弹片顶推挡在连接螺钉的端部,避免连接螺钉松落。
附图说明
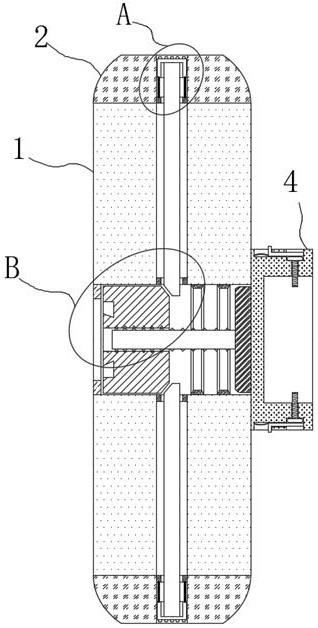
14.图1为本发明结构示意图;图2为图1中a处结构放大示意图;图3为图1中b处结构放大示意图;图4为本发明连轴套筒结构示意图。
15.图中:钢圈1、耐磨环2、塞板3、连轴套筒4、嵌入槽5、连接螺钉6、插口7、边槽8、挡片9、金属弹片10、预留孔11、封堵套筒12、防滑凸起13、牵引柄14、限位环15、弹簧16、螺杆17、挤推柄18、指槽19、加固筋圈20、防脱环21。
具体实施方式
16.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
17.请参阅图1至图4,本发明提供一种技术方案:一种实验用机器人防滑滚轮,所述实验用机器人防滑滚轮包括:钢圈1,钢圈1的外侧套设有耐磨环2,耐磨环2的一端内环口处插接有塞板3,塞板3的表面设置有连轴套筒4,连轴套筒4固定在钢圈1的表面;塞板3的表面设置有螺杆17,螺杆17的杆体上套设有挤推柄18,耐磨环2的另一端内环口设置有防脱环21,防脱环21的内环口径小于挤推柄18的外径,靠近耐磨环2一端开口的内壁上设置有加固筋圈20,挤推柄18的一侧圆环面上开设有多个指槽19,挤推柄18的另一侧圆环面边缘设置有斜面,斜面将挤推柄18的另一端构成圆台凸起,挤推柄18的内环面设置有内陆螺纹,内螺纹与螺杆17表面的外螺纹配合连接;嵌入槽5,开设在连轴套筒4的外环面,嵌入槽5的内部螺接有连接螺钉6,且嵌入槽5的内壁开设有插口7,插口7的内部插接有挡片9;挡片9呈“l”形板状结构,挡片9的一端处于边槽8中,边槽8开设在连轴套筒4的外壁上,插口7连通嵌入槽5和边槽8,挡片9的另一端和边槽8的侧壁之间设置有金属弹片10,将连轴套筒4套在行走机构的驱动轴上,然后通过连接螺钉6将连轴套筒4和驱动轴连接,安装连接螺钉6时,拨动挡片9挤压金属弹片10,如此嵌入槽5不被遮挡,连接螺钉6安装后,松开挡片9,金属弹片10回弹顶推挡片9插入嵌入槽5中遮挡连接螺钉6,避免连接螺钉6松落;预留孔11,贯穿钢圈1和耐磨环2,预留孔11的内部插接有封堵套筒12,封堵套筒12的外壁上设置有防滑凸起13,封堵套筒12的内壁设置有牵引柄14,预留孔11设置有多组,多组预留孔11沿着耐磨环2的外环面等距离等大小排列分布,预留孔11的内壁设置有限位环
15,限位环15对牵引柄14限位,防止牵引柄14摆动,牵引柄14伸入钢圈1内环口且朝向防脱环21的一端设置有斜面,防滑凸起13呈台形结构,防滑凸起13设置有多个,多个防滑凸起13等距布满封堵套筒12的表面,封堵套筒12和限位环15之间设置有弹簧16,弹簧16套设在牵引柄14的外侧,需要加强滚轮的防滑性能时,手指抠在指槽19中旋拧挤推柄18,挤推柄18沿着螺杆17行进时挤推牵引柄14,牵引柄14将顶推封堵套筒12突出预留孔11,防滑凸起13接触地面提升防滑效果,此时弹簧16被张拉,回拧挤推柄18后,弹簧16回弹牵引封堵套筒12退入预留孔11中。
18.工作原理:实际使用时,参照附图4所示,将连轴套筒4套在行走机构的驱动轴上,然后通过连接螺钉6将连轴套筒4和驱动轴连接,安装连接螺钉6时,拨动挡片9挤压金属弹片10,如此嵌入槽5不被遮挡,连接螺钉6安装后,松开挡片9,金属弹片10回弹顶推挡片9插入嵌入槽5中遮挡连接螺钉6,避免连接螺钉6松落;参照附图1和图2所示,此时封堵套筒12和防滑凸起13均处于预留孔11中,此时的滚轮防滑性能一般,需要加强滚轮的防滑性能时,手指抠在指槽19中旋拧挤推柄18,挤推柄18沿着螺杆17行进时挤推牵引柄14,牵引柄14将顶推封堵套筒12突出预留孔11,防滑凸起13接触地面提升防滑效果,此时弹簧16被张拉,回拧挤推柄18后,弹簧16回弹牵引封堵套筒12退入预留孔11中。
19.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
技术特征:
1.一种实验用机器人防滑滚轮,其特征在于:所述实验用机器人防滑滚轮包括:钢圈(1),钢圈(1)的外侧套设有耐磨环(2),耐磨环(2)的一端内环口处插接有塞板(3),塞板(3)的表面设置有连轴套筒(4),连轴套筒(4)固定在钢圈(1)的表面,塞板(3)的表面设置有螺杆(17),螺杆(17)的杆体上套设有挤推柄(18);嵌入槽(5),开设在连轴套筒(4)的外环面,嵌入槽(5)的内部螺接有连接螺钉(6),且嵌入槽(5)的内壁开设有插口(7),插口(7)的内部插接有挡片(9);及预留孔(11),贯穿钢圈(1)和耐磨环(2),预留孔(11)的内部插接有封堵套筒(12),封堵套筒(12)的外壁上设置有防滑凸起(13),封堵套筒(12)的内壁设置有牵引柄(14)。2.根据权利要求1所述的一种实验用机器人防滑滚轮,其特征在于:所述耐磨环(2)的另一端内环口设置有防脱环(21),防脱环(21)的内环口径小于挤推柄(18)的外径,靠近耐磨环(2)一端开口的内壁上设置有加固筋圈(20)。3.根据权利要求2所述的一种实验用机器人防滑滚轮,其特征在于:所述挤推柄(18)的一侧圆环面上开设有多个指槽(19),挤推柄(18)的另一侧圆环面边缘设置有斜面,斜面将挤推柄(18)的另一端构成圆台凸起。4.根据权利要求3所述的一种实验用机器人防滑滚轮,其特征在于:所述挤推柄(18)的内环面设置有内陆螺纹,内螺纹与螺杆(17)表面的外螺纹配合连接。5.根据权利要求1所述的一种实验用机器人防滑滚轮,其特征在于:所述挡片(9)呈“l”形板状结构,挡片(9)的一端处于边槽(8)中,边槽(8)开设在连轴套筒(4)的外壁上,插口(7)连通嵌入槽(5)和边槽(8),挡片(9)的另一端和边槽(8)的侧壁之间设置有金属弹片(10)。6.根据权利要求1所述的一种实验用机器人防滑滚轮,其特征在于:所述预留孔(11)设置有多组,多组预留孔(11)沿着耐磨环(2)的外环面等距离等大小排列分布,预留孔(11)的内壁设置有限位环(15),限位环(15)对牵引柄(14)限位,防止牵引柄(14)摆动,牵引柄(14)伸入钢圈(1)内环口且朝向防脱环(21)的一端设置有斜面。7.根据权利要求1所述的一种实验用机器人防滑滚轮,其特征在于:所述防滑凸起(13)呈台形结构,防滑凸起(13)设置有多个,多个防滑凸起(13)等距布满封堵套筒(12)的表面。8.根据权利要求7所述的一种实验用机器人防滑滚轮,其特征在于:所述封堵套筒(12)和限位环(15)之间设置有弹簧(16),弹簧(16)套设在牵引柄(14)的外侧。
技术总结
本发明涉及滚轮技术领域,具体为一种实验用机器人防滑滚轮,包括:钢圈,钢圈的外侧套设有耐磨环,耐磨环的一端内环口处插接有塞板,塞板的表面设置有连轴套筒,连轴套筒固定在钢圈的表面,塞板的表面设置有螺杆,螺杆的杆体上套设有挤推柄;嵌入槽,开设在连轴套筒的外环面,嵌入槽的内部螺接有连接螺钉,且嵌入槽的内壁开设有插口,插口的内部插接有挡片;及预留孔,贯穿钢圈和耐磨环,预留孔的内部插接有封堵套筒,封堵套筒的外壁上设置有防滑凸起;有益效果为:防滑滚轮表面开设多组预留孔,通过旋拧挤推柄沿着螺杆行进,挤推柄从钢圈内环口向外侧顶推牵引柄,如此封堵套筒携带防滑凸起突出预留孔,实现对耐磨环的防滑加强。实现对耐磨环的防滑加强。实现对耐磨环的防滑加强。
技术研发人员:王璐 王跃雯
受保护的技术使用者:武汉尚诚嘉音教育科技有限公司
技术研发日:2022.02.19
技术公布日:2022/5/31
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1