一种基于模型参数误差观测器的机械臂碰撞检测方法
1.本发明涉及机械臂检测领域,特别涉及一种基于模型参数误差观测器的机械臂碰撞检测方法。
背景技术:
2.机械臂是一种高精度,多输入多输出、高度非线性、强耦合的复杂系统,在工业机器人作业过程中,若机械臂与工件和设备之间发生接触,易导致机械臂损坏和工件表面划伤,并对工作人员的安全构成了威胁。为保证自身及周围环境的安全性,机械臂应具备感知外部物理碰撞,并可对碰撞做出合理响应的能力。因此,碰撞检测是机械臂实现安全性的前提。
3.现有碰撞检测方法大多基于力/力矩传感器来检测外部碰撞,但由于价格昂贵,只有少数机械臂配备了力/力矩传感器,依赖于力/力矩传感器的碰撞检测方法的适用范围非常有限;为了提高碰撞检测的适用范围,本领域提出了在机械臂内部安装传感器来实现碰撞检测的方法,该方法降低了机械臂系统的集成难度及成本,适用范围较广,已经发展成为目前主流的研究方向。但在机械臂内部安装传感器的检测方法严重依赖模型精度,由于系统模型的不确定性,大大降低了碰撞检测的精度。
技术实现要素:
4.本发明目的是为了解决现有的机械臂碰撞检测方法还存在由于系统模型的不确定性而导致的碰撞检测精度低的问题,而提出了一种基于模型参数误差观测器的机械臂碰撞检测方法。
5.一种基于模型参数误差观测器的机械臂碰撞检测方法具体过程为:
6.步骤一、建立机械臂的回归模型,并利用机械臂回归模型获取模型参数的名义值pn;
7.所述利用机械臂回归模型获取模型参数的名义值pn采用三维建模软件计算获得;
8.步骤二、采用卡尔曼平滑器观测机械臂关节的控制力矩的微分信息以及机械臂关节的速度和加速度信息;
9.步骤三、利用步骤二获得的机械臂关节的速度、加速度、控制力矩的微分和步骤一获得的pn设计步骤一建立的机械臂回归模型的自适应律;
10.步骤四、利用步骤一获得的pn和步骤三获得的自适应律获取残差r,然后利用残差r获取机械臂关节所受外力矩与残差r的传递函数;
11.所述残差r为估计的机械臂所受外力矩;
12.步骤五、利用步骤四获得的残差检测机械臂是否发生了碰撞,并利用机械臂关节所受外力矩与残差r的传递函数获得发生碰撞的机械臂关节所受的外力矩。
13.本发明的有益效果为:
14.本发明无需力/力矩传感器即可实现机械臂的碰撞检测,为机械臂及周围环境提
供安全保障,同时由于无需使用力矩传感器降低了检测成本。本发明通过卡尔曼光滑器观测机械臂控制量和状态量信息,降低了控制量和状态量信息的观测难度,降低了工程实现难度。本发明设计了机械臂回归模型的自适应律,解决了系统模型不确定性对检测精度的不良影响,提高了碰撞检测精度。
附图说明
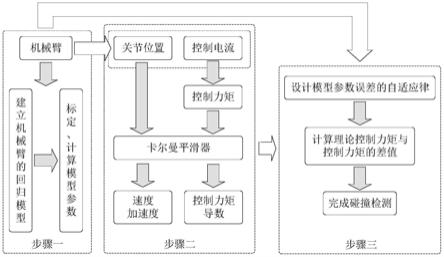
15.图1为本发明整体流程图;
16.图2为本发明机械臂碰撞检测方法框图。
具体实施方式
17.具体实施方式一:本实施方式一种基于模型参数误差观测器的机械臂碰撞检测方法,具体流程如图1所示,具体过程包括以下步骤:
18.步骤一、建立机械臂的回归模型,并利用机械臂回归模型获取模型参数的名义值pn,包括以下步骤:
19.步骤一一、建立机械臂的回归模型:
[0020][0021]
其中,q,分别为机械臂关节位置,速度,加速度;m(q)是机械臂的惯量矩阵,d是粘性摩擦矩阵,g(q)是重力向量,为机械臂的科氏力和向心力矩阵,τm是机械臂关节控制力矩,τ
ext
是机械臂所受外力矩,是机械臂的回归矩阵,p为动力学参数,pn是模型参数的名义值,δp是参数误差;
[0022]
由公式(1)可得:
[0023][0024]
步骤一二、利用三维建模软件计算和模型参数辨识实验对步骤一一获得的机械臂回归模型进行处理获得模型参数的名义值pn。
[0025]
步骤二、采用卡尔曼平滑器观测机械臂关节的控制力矩的微分信息以及机械臂关节的速度和加速度信息;
[0026]
所述机械臂关节的控制力矩通过以下方式获得:
[0027]
τm=ki
ꢀꢀꢀ
(3)
[0028]
其中,k为正定对角矩阵,i是机械臂的控制电流;
[0029]
所述机械臂关节的速度和加速度通过以下方式获得:
[0030]
通过位置传感器获取机械臂的位置信息并利用机械臂的位置信息获得机械臂关节的速度和加速度;
[0031]
步骤三、利用步骤二获得的机械臂关节的速度、加速度、控制力矩的微分和步骤一获得的pn设计步骤一建立的机械臂回归模型的自适应律,如下:
[0032][0033]
其中,为的伪逆矩阵,kc为对角正定矩阵,是机械臂回归模
型的自适应律,是机械臂回归模型自适应律的导数,是的导数,是τm的导数;
[0034]
从而公式(4)改写为如下形式:
[0035][0036]
由于名义模型参数pn是定常向量,所以公式(5)改写为:
[0037][0038]
公式(6)改写为:
[0039][0040]
步骤四、利用步骤一获得的pn和步骤三获得的自适应律获取残差r,然后利用步骤三获取的自适应律和残差r获取机械臂关节所受外力矩与残差r的传递函数,如图2所示,包括以下步骤:
[0041]
步骤四一、利用步骤一获得的回归模型的名义值pn和步骤三获得的自适应律定义残差r如下:
[0042][0043]
其中,残差r即为估计的机械臂关节所受的外力矩;
[0044]
步骤四二、利用步骤四一定义的残差r和步骤一获得的机械臂回归模型获得残差r与机械臂关节所受外力矩τ
ext
的差:
[0045]
首先,公式(8)同公式(2)相减可得:
[0046][0047]
步骤四三、将步骤四一获得的残差r和步骤四二获得的残差r与机械臂关节所受的外力矩τ
ext
的差代入步骤三获得的自适应律,获得残差r与机械臂关节所受外力矩的关系:
[0048]
然后,将公式(8)和公式(9)代入公式(7),获得如下公式:
[0049][0050]
步骤四四、利用步骤四三获得的残差r与机械臂关节所受外力矩的关系获取机械臂关节所受外力矩与残差的传递函数:
[0051][0052]
其中,k
cj
为矩阵kc的第j个对角元素,s为复变量,j是关节臂的关节标号,τ
ext,j
是关节臂第j个关节所受的外力矩。
[0053]
步骤五、利用步骤四获得残差的检测机械臂是否发生了碰撞,并利用机械臂关节所受外力矩与残差r的传递函数获得发生碰撞的机械臂关节所受的外力矩,包括以下步骤:
[0054]
由公式(11)可以看出,本发明中的基于模型参数误差观测器的机械臂碰撞检测方法利用残差r估计机械臂关节所受外力矩τ
ext
,本质上是通过一阶低通滤波器来实现的。当矩阵kc对角元素的值足够大时,残差r收敛于外力矩τ
ext
。
[0055]
理论上在机械臂正常运行过程中,残差元素rj的值应该是零;但是当机械臂发生碰撞时,外力矩被引入到机械臂系统中,残差元素rj的值就会增加。因此,根据碰撞要求设定合适的阈值r
th
,当任一残差元素rj的值超过阈值时表明说明机械臂与外界发生了碰撞。将大于预设残差阈值的残差代入步骤四获得的机械臂关节所受外力矩与残差的传递函数中,获得发生碰撞的机械臂关节所受的外力矩。
[0056]
以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的一般技术人员来说,依据本发明的思想,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1