利用机器人在仓库中执行任务的方法和装置与流程
本申请涉及机器人辅助拣选领域,具体而言,涉及一种利用机器人在仓库中执行任务的方法及装置、一种对仓库中执行任务的机器人进行调度的方法及装置、一种仓库任务调度系统和电子设备。
背景技术:
1、在物流行业中,仓库的出库效率很大程度上是由最复杂的拣货环节决定的。随着技术的快速发展,开始利用机器人进行辅助拣选。目前,常见的拣货方式主要包括按照订单拣选、按批次或波次拣选、按照流程拣选等方式。
2、随着电商行业的激烈竞争,促销已经成为电商行业的常用手段,而仓库的发货效率却往往无法跟上瞬时大量订单的涌入。传统的按订单拣货的方式完全无法适配在b2c电商促销场景中应用。按批次或波次的拣货方式多应用于电商场景的sku种类多,订单行少的场景,但是在一个超过几千平米的仓库中,完成一个批次的拣货,往往需要很长时间,对人员的体力消耗也非常大,而且按批次拣货无法解决随时新下发到系统中的新订单。比如,在拣选路径中刚走过的货位,即使有订单需要拣选,也无法动态的加入到批次任务中。
3、为了解决以上各种问题,减少订单的积压,寻找一种密集高效的出库方式势在必行。amr机器人的引入且加上机器人行走过程中动态的规划下一点位最优化的任务,恰恰解决了这种大仓库,且无法动态辐射拣选的难题。
技术实现思路
1、本申请提供了一种利用机器人在仓库中执行任务的方法及装置、一种对仓库中执行任务的机器人进行调度的方法及装置、一种仓库任务调度系统和电子设备,用于解决机器人在执行拣选任务时,无法根据当前位置动态执行拣选任务,导致的拣选效率低的问题。
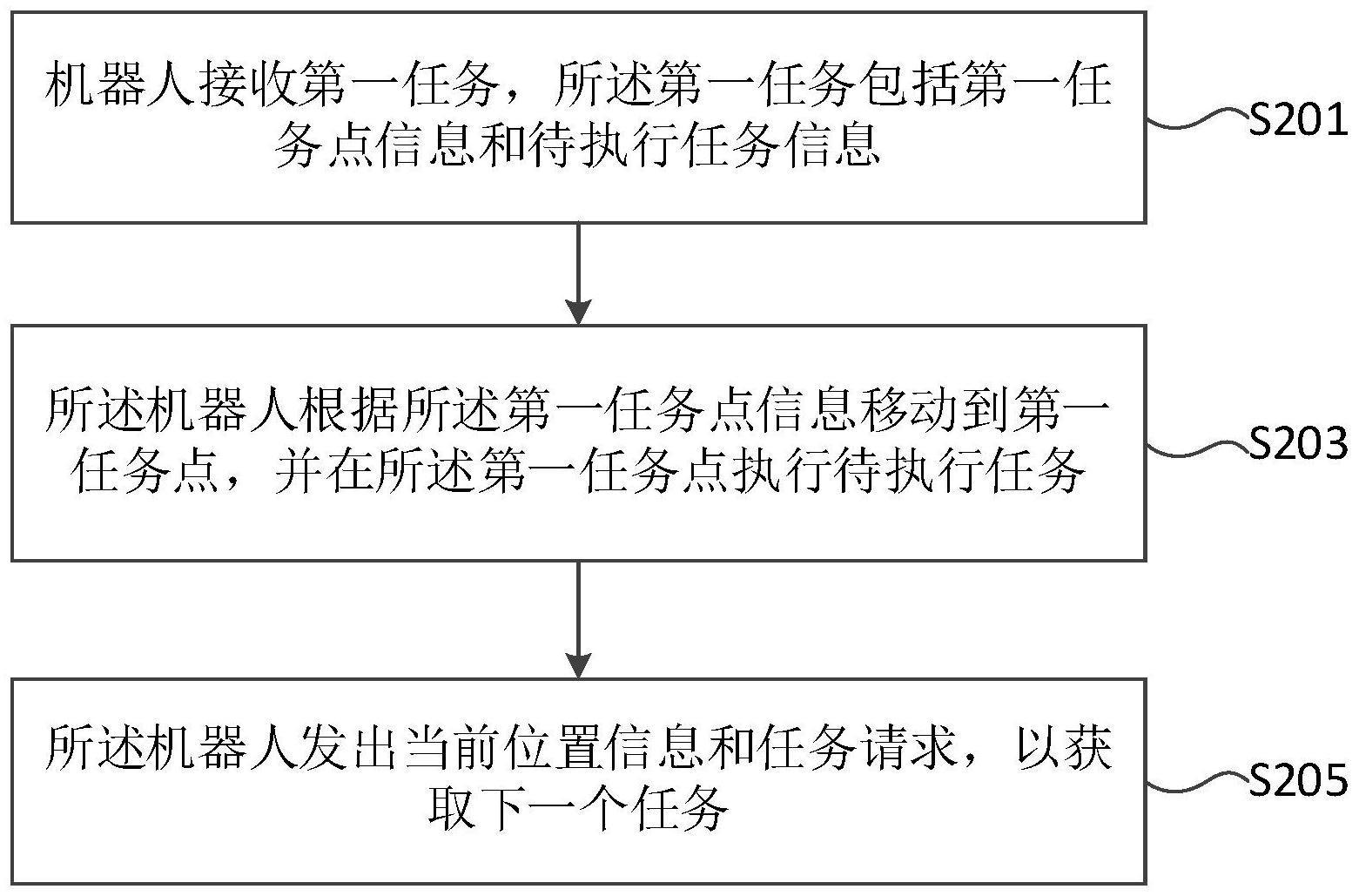
2、根据本申请的一方面,提出一种利用机器人在仓库中执行任务的方法,包括:机器人接收第一任务,所述第一任务包括第一任务点信息和待执行任务信息,所述第一任务点信息所指定的第一任务点位于所述仓库的当前任务密集区域;所述机器人根据所述第一任务点信息移动到所述第一任务点,并在所述第一任务点执行待执行任务;以及在执行所述待执行任务前或在执行所述待执行任务时或在执行完所述待执行任务后,所述机器人发出当前位置信息和任务请求,以获取下一个任务。
3、根据一些实施例,在所述机器人发出当前位置信息和任务请求之前,所述方法还包括:所述机器人判断当前承载量是否达到预设的承载阈值;响应于所述当前承载量到达所述承载阈值,所述机器人发出卸车任务申请。
4、根据一些实施例,所述任务请求包括所述机器人当前的剩余载重信息,所述剩余载重信息包括剩余载重重量、剩余载重体积和/或剩余载重容量。
5、根据一些实施例,所述待执行任务信息包括所述机器人的停车位姿、执行动作和/或订单信息。
6、根据本申请的一方面,提出一种对仓库中执行任务的机器人进行调度的方法,包括:响应于机器人发出的任务请求,确定当前任务区域,并生成任务,所述任务包括位于所述当前任务区域内的任务点信息和待执行任务信息,所述当前任务区域包括当前任务密集区域或距离所述机器人当前位置最近的任务区域或距离所述机器人当前位置最近的任务密集区域;向所述机器人发送生成的所述任务。
7、根据一些实施例,确定当前任务区域,包括:实时利用订单池计算仓库内每个单位区域内的订单数量;根据所述订单数量确定当前任务区域。
8、根据一些实施例,所述单位区域为所述仓库中的一条巷道、一条巷道的一部分、一个货架或一个货架的一部分。
9、根据一些实施例,所述确定当前任务区域,包括:实时根据所述机器人的当前位置信息确定当前任务区域。
10、根据一些实施例,所述确定当前任务区域,包括:实时根据所述机器人的当前位置信息和所述机器人的当前剩余载重信息确定当前任务区域。
11、根据一些实施例,所述确定当前任务区域,包括:实时利用订单池确定当前任务密集区域;根据所述机器人的当前位置信息,从所述当前任务密集区域中选择距离所述机器人距离最近的密集区域作为所述当前任务区域。
12、根据一些实施例,所述确定当前任务区域,包括:实时利用订单池确定当前任务密集区域;根据所述机器人的当前位置信息和所述机器人的当前剩余载重信息,从所述当前任务密集区域中确定所述当前任务区域。
13、根据一些实施例,响应于机器人发出的卸车任务申请,根据所述卸车任务申请,确定所述机器人的卸车停靠点;向所述机器人发送卸车任务,所述卸车任务包括确定的卸车停靠点。
14、根据一些实施例,所述仓库包括多个卸车停靠点,所述卸车任务包括的卸车停靠点为距离所述机器人最近的卸车停靠点。
15、根据本申请的一方面,提出一种利用机器人在仓库中执行任务的装置,包括:任务接收单元,用于机器人接收第一任务,所述第一任务包括第一任务点信息和待执行任务信息,所述第一任务点信息所指定的第一任务点位于所述仓库的当前任务密集区域;移动单元,用于所述机器人根据所述第一任务点信息移动到所述第一任务点,并在所述第一任务点执行待执行任务;以及任务请求单元,用于在执行所述待执行任务前或在执行所述待执行任务时或在执行完所述待执行任务后,所述机器人发出当前位置信息和任务请求,以获取下一个任务。
16、根据本申请的一方面,提出一种对仓库中执行任务的机器人进行调度的装置,包括:任务响应单元,用于响应于机器人发出的任务请求,确定当前任务区域,并生成任务,所述任务包括位于所述当前任务区域内的任务点信息和待执行任务信息,所述当前任务区域包括当前任务密集区域或距离所述机器人当前位置最近的任务区域或距离所述机器人当前位置最近的任务密集区域;任务发送单元,用于向所述机器人发送生成的所述任务。
17、根据本申请的一方面,提出一种仓库任务调度系统,包括机器人资源计划系统和机器人,其中:所述机器人资源计划系统执行如前任一所述的利用机器人在仓库中执行任务的方法;所述机器人执行如前任一所述的对仓库中执行任务的机器人进行调度的方法。
18、根据本申请的一方面,提出一种电子设备,包括:一个或多个处理单元;存储单元,用于存储一个或多个程序;当所述一个或多个程序被所述一个或多个处理器执行,使得一个或多个处理单元实现如前任一所述的方法。
19、根据本申请的一些实施例,利用机器人,通过动态实时拣选任务,解决了当机器人在执行拣选任务时,无法动态执行拣选任务,导致的拣选效率低的问题。
20、根据本申请的另一些实施例,利用机器人的当前位置信息确定当前任务区域,使得机器人不仅可以动态接收拣选任务,而且可以用最短时间完成拣选任务,使得拣选效率更高。同时,利用机器人的剩余承载量,使得机器人可以按最大承载量完成一个车次任务的拣选。
技术特征:
1.一种利用机器人在仓库中执行任务的方法,包括:
2.根据权利要求1所述的方法,其中在所述机器人发出当前位置信息和任务请求之前,所述方法还包括:
3.根据权利要求1所述的方法,其中所述任务请求包括所述机器人当前的剩余载重信息,所述剩余载重信息包括剩余载重重量、剩余载重体积和/或剩余载重容量。
4.根据权利要求1所述的方法,其中所述待执行任务信息包括所述机器人的停车位姿、执行动作和/或订单信息。
5.一种对仓库中执行任务的机器人进行调度的方法,包括:
6.根据权利要求5所述的方法,其中确定当前任务区域,包括:
7.根据权利要求6所述的方法,其中所述单位区域为所述仓库中的一条巷道、一条巷道的一部分、一个货架或一个货架的一部分。
8.根据权利要求5所述的方法,其中所述确定当前任务区域,包括:
9.根据权利要求5所述的方法,其中所述确定当前任务区域,包括:
10.根据权利要求5所述的方法,其中所述确定当前任务区域,包括:
11.根据权利要求5所述的方法,其中所述确定当前任务区域,包括:
12.根据权利要求5所述的方法,所述方法还包括:
13.根据权利要求12所述的方法,其中所述仓库包括多个卸车停靠点,所述卸车任务包括的卸车停靠点为距离所述机器人最近的卸车停靠点。
14.一种利用机器人在仓库中执行任务的装置,包括:
15.一种对仓库中执行任务的机器人进行调度的装置,包括:
16.一种仓库任务调度系统,包括机器人资源计划系统和机器人,其中:
17.一种电子设备,包括:
技术总结
本申请提供了一种利用机器人在仓库中执行任务的方法及装置、一种对仓库中执行任务的机器人进行调度的方法及装置、一种仓库任务调度系统和电子设备,一种利用机器人在仓库中执行任务的方法,包括:机器人接收第一任务,所述第一任务包括第一任务点信息和待执行任务信息,所述第一任务点信息所指定的第一任务点位于所述仓库的当前任务密集区域;所述机器人根据所述第一任务点信息移动到所述第一任务点,并在所述第一任务点执行待执行任务;以及在执行所述待执行任务前或在执行所述待执行任务时或在执行完所述待执行任务后,所述机器人发出当前位置信息和任务请求,以获取下一个任务。根据实施例,解决了机器人在执行拣选任务时,拣选效率低的问题。
技术研发人员:李伟
受保护的技术使用者:灵动科技(北京)有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!