一种用于竖井的智能巡检机器人的制作方法
1.本发明主要涉及巡检机器人技术领域,具体涉及一种用于竖井的智能巡检机器人。
背景技术:
2.目前,在高空建筑及电力行业,为了监视和掌握电缆线路和所有附属设备的运行情况,及时发现和消除电缆线路和所有附属设备异常和缺陷,预防事故发生,确保电缆线路安全运行,需要巡查人员定期通过察看、听嗅、检测等方法对电缆线路设备进行检查。电缆铺设时间越久,越有线缆老化等风险,巡检工作至关重要。考虑到动辄高达几十上百米的竖井中的电缆的巡检不易:人工巡检的劳动强度,长时间运行后需要加强的巡检频率,苛刻环境下人工巡检的安全风险,可能出现的不及时、不到位、不准确等各种人为缺陷,开发一款垂直升降智能巡检机器人,避免因传统巡检不全面、不量化、人员素质依赖性强引起的各项损失,减少绝大部分的人工巡检次数,提升安全性和运维效率就显得尤为重要。
技术实现要素:
3.本发明要解决的技术问题就在于:针对现有技术存在的问题,本发明提供一种结构简单、运行可靠、实现竖井内设备及电缆实时监控的智能巡检机器人。
4.为解决上述技术问题,本发明提出的技术方案为:
5.一种用于竖井的智能巡检机器人,包括机器人本体、升降单元、储能单元和无线充电单元,所述升降单元包括轨道组件、升降平台和牵引组件,所述机器人本体位于所述升降平台上,所述升降平台位于所述轨道组件上且与所述牵引组件相连,并在牵引组件的牵引下在所述轨道组件上升降;所述储能单元位于所述机器人本体内部,所述无线充电单元包括无线充电发射线圈和无线充电接收线圈,所述无线充电发射线圈位于所述轨道组件的一侧,所述无线充电接收线圈位于所述机器人本体内且与所述储能单元相连。
6.作为上述技术方案的进一步改进:
7.所述机器人本体包括壳体和成像仪,所述成像仪通过云台安装于所述壳体上,所述壳体下端布置有传感器组件;所述壳体与云台之间设置有转接板,所述壳体、转接板和云台之间设有相连通的线孔;所述转接板与壳体之间、以及转接板与云台之间均设置有密封组件。
8.所述密封组件包括位于所述转接板上下面的o型圈槽,所述o型圈槽内部设置有o型圈。
9.所述传感器组件位于所述壳体的下端,包括烟雾传感器、粉尘传感器、温湿度传感器、氧气传感器、一氧化碳传感器、硫化氢传感器和碳氢化合物气体传感器中的一种或多种;其中传感器组件内设有至少两个腔室,其中温湿度传感器布置于一个腔室内,其他传感器布置于另一腔室内。
10.所述机器人本体的上端安装有上端超声波雷达,所述上端超声波雷达高于所述机
器人本体的最高位置;所述机器人本体的下端安装有下端超声波雷达,所述下端超声波雷达低于所述机器人本体的最低位置。
11.还包括辅助定位单元,所述辅助定位单元包括接近开关和感应板,所述接近开关位于所述壳体上,所述感应板位于所述轨道组件上,所述接近开关与感应板相互配合以实现机器人本体的辅助定位。
12.还包括无线通讯单元,所述无线通讯单元包括wifi通讯模块和泄漏电缆,所述wifi通讯模块位于所述壳体内部,所述泄漏电缆沿所述轨道组件布置方向铺设。
13.所述轨道组件的上端设有上端固定组件,通过膨胀螺栓固定于竖井内墙壁上,所述轨道组件的下端设有下端固定组件,通过膨胀螺栓固定于竖井内墙壁上;所述牵引组件包括上牵引轮组件、下牵引张紧轮组件和电机驱动组件,所述上牵引轮组件与下牵引张紧轮组件之间设置有钢丝绳,所述电机驱动组件用于实现所述钢丝绳的牵引。
14.所述升降平台通过安装于其上下两端面的吊环,与钢丝绳首尾相连,使钢丝绳形成闭合回路;所述升降平台内侧的四个导向轮与轨道组件配合,保证升降平台通过钢丝绳平稳运行。
15.所述轨道组件的上端布置有上端零点开关和上限位开关,所述轨道组件的下端布置有下端零点开关和下限位开关。
16.与现有技术相比,本发明的优点在于:
17.本发明的用于竖井的智能巡检机器人,具有结构紧凑,运行可靠,可大幅降低人工巡检的劳动强度,大幅降低苛刻环境下人工巡检的安全风险,杜绝可能出现的不及时、不到位、不准确等各种人为缺陷,有效监控环境温度及图像,有效监控电缆温度指标,并进行长时间存储、统计分析,对设备的变化与寿命进行早期预警,以便提醒工作人员在故障前进行处理,预防突发事故的发生;上述巡检机器人配置有无线充电单元,保证巡检机器人的正常作业。
附图说明
18.图1为本发明的巡检机器人在实施例的立体结构图。
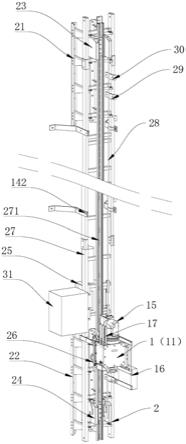
19.图2为本发明的巡检机器人在实施例的主视结构图。
20.图3为本发明的巡检机器人在实施例的侧视结构图。
21.图4为本发明的巡检机器人在实施例的俯视结构图。
22.图5为本发明的机器人本体在实施例的立体结构图。
23.图例说明:1、机器人本体;11、壳体;12、上端超声波雷达;121、上端支架;13、下端超声波雷达;131、下端支架;14、接近开关;141、安装支架;142、感应板;15、成像仪;151、云台;152、转接板;16、无线充电单元;161、无线充电发射线圈;162、发射机箱;163、无线充电接收线圈;17、无线通讯单元;171、天线;18、传感器组件;19、指示灯;110、液晶显示屏;2、升降单元;21、上端固定组件;22、下端固定组件;23、牵引轮组件;24、牵引张紧轮组件;25、电机驱动组件;26、升降平台;27、轨道组件;271、中央导轨;28、钢丝绳;29、上端零点开关;30、上限位开关;31、电控箱。
具体实施方式
24.以下结合说明书附图和具体实施例对本发明作进一步描述。
25.如图1~4所示,本发明实施例的用于竖井的智能巡检机器人,包括机器人本体1、升降单元2、储能单元和无线充电单元16,升降单元2包括轨道组件27、升降平台26和牵引组件,机器人本体1位于升降平台26上,升降平台26位于轨道组件27上且与牵引组件相连,并在牵引组件的牵引下在轨道组件27上升降;储能单元位于机器人本体1内部,提供机器人本体1所需电源,无线充电单元16包括无线充电发射线圈161和无线充电接收线圈163,无线充电发射线圈161位于轨道组件27的一侧,无线充电接收线圈163位于机器人本体1内且与储能单元相连,通过无线充电发射线圈161和无线充电接收线圈163的配合以实现对储能单元的无线充电作业。
26.本发明的用于竖井的智能巡检机器人,具有结构紧凑,运行可靠,可大幅降低人工巡检的劳动强度,大幅降低苛刻环境下人工巡检的安全风险,杜绝可能出现的不及时、不到位、不准确等各种人为缺陷,有效监控环境温度及图像,有效监控电缆温度指标,并进行长时间存储、统计分析,对设备的变化与寿命进行早期预警,以便提醒工作人员在故障前进行处理,预防突发事故的发生;上述巡检机器人配置有无线充电单元16,保证巡检机器人的正常作业。
27.在一具体实施例中,如图5所示,机器人本体1包括壳体11和成像仪15,成像仪15通过云台151安装于壳体11上,壳体11下端布置有传感器组件18;壳体11与云台151之间设置有转接板152,壳体11、转接板152和云台151之间设有相连通的线孔,从而便于走线;转接板152与壳体11之间、以及转接板152与云台151之间均设置有密封组件(图中未示出),保证防水性能。具体地,成像仪15为高清红外成像仪,用于检测电缆温度及线缆可视化的智能化巡检;云台151置于壳体11上端偏右部分,可水平360
°
旋转,垂直方向可俯仰一定角度(如-20
°
~90
°
),搭配安装于竖井左侧墙壁上的升降单元2,针对竖井中垂直布置的电缆,无监视盲区。传感器组件18中各气体传感器紧致布置于塑料传感器盒内,传感器盒安装于壳体11的正下端。另外,密封组件包括位于转接板152上下面的o型圈槽,o型圈槽内部设置有o型圈,从而实现云台151与转接板152,转接板152与壳体11之间的密封性。
28.在一具体实施例中,储能单元为宽温锂电池,置于壳体11内部,无线充电接收线圈163及其对应的接收机箱置于壳体11内部右侧居中位置,与布置在轨道组件27上的无线充电发射线圈161和发射机箱162配合使用。为了避免干扰无线充电的正常配合使用,无线充电发射线圈161和无线充电接收线圈163处的壳体11材质采用塑料材质,典型情况下单次充电可保证巡检机器人连续工作8h。
29.在一具体实施例中,传感器组件18包含检测氧气、一氧化碳、硫化氢、碳氢化合物的气体传感器,可用于检测交联聚乙烯挤包绝缘电缆过热产生的气体;还包含烟雾传感器,粉尘传感器,温湿度传感器,探测附近环境的烟雾、粉尘浓度和温湿度。因气体传感器工作时发热量较大,将塑料传感器盒内单独开辟一隔断腔室布置温湿度传感器,使其免受气体传感器散热影响。上述各传感器分别检测环境中各项指标具体数值,巡检机器人可结合各项指标进行统计分析,对线缆的变化与寿命进行早期预警,提醒工作人员提前处理,预防事故发生。
30.在一具体实施例中,机器人本体1的上端安装有上端超声波雷达12,上端超声波雷
达12高于机器人本体1的最高高度;机器人本体1的下端安装有下端超声波雷达13,下端超声波雷达13低于机器人本体1的最低位置。具体地,上端超声波雷达12安装于一碳钢焊接支架上,支架安装于升降平台26的上端面,使上端超声波雷达12高于云台151和成像仪15的位置,下端超声波雷达13则安装于下端铝质支架132上,下端超声波雷达13位置凸出于底部传感器组件18(机器人本体1最低位置),保证上下端超声波雷达13不受机器人本体1和升降单元2干扰,在机器人本体1巡检过程中可探测上下方的障碍物,感应到障碍物时及时停止运行,保护巡检机器人。
31.在一具体实施例中,还包括辅助定位单元,辅助定位单元包括接近开关14和感应板142,接近开关14位于壳体11上,感应板142位于轨道组件27上,接近开关14与感应板142相互配合以实现机器人本体1的辅助定位。具体地,接近开关14通过安装支架141安装于机器人本体1底板上端左侧,与安装于轨道组件27上的碳钢感应板142配合以用于辅助机器人定位,对于高达百米的轨道组件27,全程升降启停难免有所误差,于途中进行辅助定位有助于提高巡检机器人的定位精度。
32.在一具体实施例中,还包括无线通讯单元17,无线通讯单元17包括wifi通讯模块、天线171和泄漏电缆,wifi通讯模块位于壳体11内部,天线171布置于壳体11上端偏左部分,泄漏电缆沿轨道组件27布置方向铺设以实现通讯,解决竖井隔层无线信号阻断问题。其中wifi通信,基站支持2.4g频段泄露电缆,在此基础上,集成5g通信模块,支持5g功能。其中,上述无线通讯单元17与无线充电功能可进行集成,具体为可设置为:包括无线供电通讯板和无线通讯板,其中无线通讯板位于壳体11内并与巡检机器人的控制器相连,无线供电通讯板则位于轨道组件27一侧,无线通讯板与无线供电通讯板通讯相连,用于接收控制器的相关数据并发送至无线供电通讯板,并以无线方式提供电源,无线供电通讯板则经泄漏电缆将数据传输至后台或终端,从而同时实现无线通讯和无线供电。
33.在一具体实施例中,壳体11的左下角安装有黄、绿、红三色小型指示灯19,小巧节省空间,可显示机器人运行状态。壳体11正面端盖上装有液晶屏,可实时显示机器人本体1剩余电量等数据。壳体11前后端面与底板和外盖连接处,布置有硬度适中的硅胶质密封圈,壳体11两侧端面均开有排水槽,可保证壳体11内部的防水密封性,提供机器人本体1内部元器件长时间稳定运行的环境。
34.在一具体实施例中,轨道组件27的上端设有上端固定组件21,通过膨胀螺栓固定于竖井内墙壁上,轨道组件27的下端设有下端固定组件22,通过膨胀螺栓固定于竖井内墙壁上;牵引组件包括上牵引轮组件23(包括两个牵引轮)、下牵引张紧轮组件24(包括两个牵引轮)和电机驱动组件25,上牵引轮组件23与下牵引张紧轮组件24之间设置有钢丝绳28,电机驱动组件25用于驱动钢丝绳28转动。其中上牵引轮组件23的牵引轮用来牵引钢丝绳28,下牵引张紧轮组件24用来牵引钢丝绳28,并通过张紧钣金件上的张紧螺栓来张紧绷直钢丝绳28,保证平稳的传递电机驱动组件25输出的力矩和速度。其中电机驱动组件25包含电机系统、驱动轮和导向轮等配件,用来提供稳定充足的牵引动力。
35.在一具体实施例中,升降平台26通过安装于其上下两端面的吊环,与钢丝绳28首尾相连,使钢丝绳28形成闭合回路;轨道组件27包括中央铝合金质导轨,其两侧含特殊突起造型,配合安装于升降平台26上的四个中间凹陷的导向轮,对整套垂直升降单元2起导向和稳定作用,并提高了整套升降平台26的运行精度和可靠性。其中升降平台26通过安装于上
下两端面的四个吊环,与两条通过上下牵引轮的钢丝绳28首尾相连,使钢丝绳28形成闭合回路,并搭载升降平台26上下运行。
36.在一具体实施例中,轨道组件27上下端位置分别布置有代表上下起始零点位置的上端零点开关29和下端零点开关,在起始点以外的上下端还分别设置代表限位作用的上限位开关30和下限位开关,除此之外另布置有机械硬限位,防止平台运行超过行程,出现意外情况。
37.以上仅是本发明的优选实施方式,本发明的保护范围并不仅局限于上述实施例,凡属于本发明思路下的技术方案均属于本发明的保护范围。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理前提下的若干改进和润饰,应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1