一种无人机伸缩悬臂测量装置
1.本发明涉及无人机机械臂技术领域,特别是涉及一种无人机伸缩悬臂测量装置。
背景技术:
2.随着社会经济的日益发展和用户用电要求的不断提高,电力行业正面临日益严峻的挑战。火力发电是我国主要的发电方式,电站锅炉作为火力电站的三大主机设备之一,其安全性也越来越受到关注和重视。电站锅炉在长期的使用过程中,受焊接缺陷、疲劳与腐蚀效应、材料老化等因素影响,不可避免地会产生损伤累积、抗力衰退,进而出现裂纹、锈蚀、磨损、变形、连接部位损坏以及其他形式的结构缺陷,进而导致结构脆性断裂或者疲劳断裂,引发灾难性安全事故。因此,对电站结构缺陷进行检测和定位,可以有效预防并控制安全事故的发生,减少人员和设备财产的损失,对保障设备的安全运行具有重要的意义。
3.目前,电站锅炉检修任务中针对锅炉水冷壁管高温腐蚀和磨损等因素造成的壁管减薄等情况的检查工作主要依靠人工完成,工人不仅需要完成脚手架和升降平台的搭设和拆卸,还需要通过采用手摸、眼看、手持测量仪器等手段完成对锅炉内壁管道的腐蚀和磨损情况进行检测和判断,在此过程中存在工作强度大、工作效率低、费用高、事故率高、误判率高等诸多缺点。且采用无人机测量管壁厚度时,对无人机测量位置、角度等因数要求较高,测量不准确,误差大。
4.因此,如何降低因接触壁面测厚中对飞行器的位置和姿态控制精度要求,是本领域技术人员亟待解决的技术问题。
技术实现要素:
5.本技术的一些实施例中,提供了一种无人机伸缩悬臂测量装置,此装置用于锅炉内换热管道非平整条件下进行壁厚检测,用以解决现有无人机锅炉壁面厚度检测技术中存在的因不能柔性伸缩地自适应接触力导致的对飞行器的位置和姿态控制精度要求过高的技术问题。
6.本技术的一些实施例中,改进了无人机悬臂的转动结构,伸缩悬臂机构通过衔接座连接无人机,伸缩悬臂机构包括第一连杆组件、第二连杆组件和弹性组件,第一连杆组件一端铰接于所述衔接座,另一端铰接于所述转接座;第二连杆组件两端铰接于所述转接座;弹性组件一端固定连接于所述第一连杆组件,另一端滑动连接于所述第二连杆组件,所述弹性组件用于使所述第二连杆组件伸缩。通过扭力弹簧、拉伸弹簧和多个连杆组成的伸缩结构实现测厚过程中机械臂的柔性伸缩过程,解决因接触壁面测厚中对飞行器的位置和姿态控制精度要求过高的问题。
7.本技术的一些实施例中,改进了无人机与管壁的接触结构,支撑机构连接伸缩悬臂机构,所述支撑机构包括第五连接杆、安装座和永磁滚动珠,第五连接杆一端固定连接于所述第二转接座;安装座固定连接于所述第五连接杆的另一端;永磁滚动珠设置于所述安装座两侧,所述永磁滚动珠用于带动所述安装座在管壁上滑动,从而使所述安装座与所述
检测装置之间存在间隙。通过前端的永磁滚动珠结构使笔式电磁超声探头与测量壁面保持一定的间隙距离,可有效避免直接磁吸附,使吸附力控制在一定合理的范围内,使得支撑机构前置的电磁超声探头可随无人机的拖动在被测管壁上移动,完成测厚数据采集。
8.本技术一些实施例中,本发明提供了一种无人机伸缩悬臂测量装置,应用于无人机中,该装置包括:
9.衔接座,固定连接于所述无人机;
10.伸缩悬臂机构,铰接于所述衔接座;
11.转接座,铰接于所述伸缩悬臂机构;
12.支撑机构,固定连接于所述转接座,所述支撑机构用于随着所述伸缩悬臂机构和转接座进行摆动;
13.检测装置,固定连接于所述支撑机构;
14.所述伸缩悬臂机构用于带动所述支撑机构进行伸展或回缩。
15.本技术一些实施例中,所述伸缩悬臂机构包括:
16.第一连杆组件,一端铰接于所述衔接座,另一端铰接于所述转接座;
17.第二连杆组件,两端铰接于所述转接座;
18.弹性组件,一端固定连接于所述第一连杆组件,另一端滑动连接于所述第二连杆组件,所述弹性组件用于使所述第二连杆组件伸缩。
19.本技术一些实施例中,所述转接座包括:
20.第一转接座,铰接于所述第一连杆组件和所述第二连杆组件,所述第一转接座用于使所述第一连杆组件和所述第二连杆组件以所述第一转接座为中心进行摆动;
21.第二转接座,一端铰接于所述第二连杆组件,另一端固定连接于所述支撑机构,所述第二转接座用于带动所述支撑机构随所述第二连杆组件摆动。
22.本技术一些实施例中,所述第一连杆组件包括:
23.第一连接杆,一端铰接于所述衔接座,另一端铰接于所述第一转接座;
24.第二连接杆,一端铰接于所述衔接座,另一端铰接于所述第一转接座,所述第二连接杆上固定连接于所述弹性组件。
25.本技术一些实施例中,所述第二连杆组件包括:
26.第三连接杆,一端铰接于所述第一转接座,另一端铰接于所述第二转接座,所述第三连接杆上开设有滑槽;
27.第四连接杆,一端铰接于所述第一转接座,另一端铰接于所述第二转接座。
28.本技术一些实施例中,所述弹性组件包括:
29.拉力弹簧,一端固定连接于所述第二连接杆;
30.环扣,滑动设置于所述滑槽中,所述拉力弹簧另一端挂接于所述环扣,所述环扣用于带动所述拉力弹簧在所述滑槽内滑动。
31.本技术一些实施例中,所述衔接座包括:
32.法兰板,固定连接于所述无人机,所述法兰板铰接于所述第一连接杆和所述第二连接杆;
33.扭力弹簧,设置于所述法兰板和所述第一连接杆之间。
34.本技术一些实施例中,所述支撑机构包括:
35.第五连接杆,一端固定连接于所述第二转接座;
36.安装座,固定连接于所述第五连接杆的另一端。
37.本技术一些实施例中,所述支撑机构还包括:
38.永磁滚动珠,设置于所述安装座两侧,所述永磁滚动珠用于带动所述安装座在管壁上滑动,从而使所述安装座与所述检测装置之间存在间隙。
39.本技术一些实施例中,所述检测装置包括:
40.电磁超声探头,固定连接于所述安装座上,所述电磁超声探头用于对管壁厚度进行测量。
41.本发明与现有技术相比,具有以下有益效果:
42.无人机上搭载测量仪器的方式代替一部分人工工作,旋翼无人机通过控制每个旋翼的转速来控制飞行器位置和姿态,具备易于操作、灵活机动、垂直升降、精准悬停等优势,提高了无人机在锅炉内部检修飞行中测厚探头与壁面接触的适应性,通过扭力弹簧、拉伸弹簧和连杆等组成的伸缩结构实现测厚过程中连杆的柔性伸缩过程,解决因接触壁面测厚中对飞行器的位置和姿态控制精度要求过高的问题。通过无人机搭载并前置电磁超声测厚传感器等检测设备,可在电站锅炉检修中替代部分人工工作开展对锅炉换热管道壁厚及缺陷的定期监控,提前预警并避免安全事故的出现。
附图说明
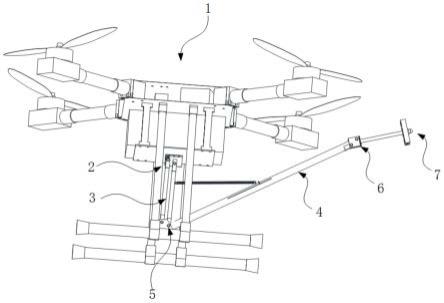
43.图1是本发明实施例中一种无人机伸缩悬臂测量装置与无人机连接的结构示意图;
44.图2是本发明实施例中一种无人机伸缩悬臂测量装置的结构示意图;
45.图3是本发明实施例中一种无人机伸缩悬臂测量装置中a处结构的放大示意图;
46.图4是本发明实施例中一种无人机伸缩悬臂测量装置中b处结构的放大示意图;
47.图5是本发明实施例中一种无人机伸缩悬臂测量装置中c处结构的放大示意图;
48.图中,
49.1、无人机;
50.2、衔接座;21、法兰板;22、扭力弹簧;
51.3、第一连杆组件;31、第一连接杆;32、第二连接杆;
52.4、第二连杆组件;41、第三连接杆;42、第四连接杆;43、拉力弹簧;44、环扣
53.5、第一转接座;
54.6、第二转接座;
55.7、检测装置;
56.8、支撑机构;81、第五连接杆;82、安装座;83、永磁滚动珠。
具体实施方式
57.下面结合附图和实施例,对本发明的具体实施方式作进一步详细描述。以下实施例用于说明本发明,但不用来限制本发明的范围。
58.在本技术的描述中,需要理解的是,术语“中心”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的
方位或位置关系,仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术的限制。
59.术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本技术的描述中,除非另有说明,“多个”的含义是两个或两个以上。
60.在本技术的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本技术中的具体含义。
61.本发明提供了一种无人机伸缩悬臂测量装置,应用于无人机1中,该装置包括衔接座、伸缩悬臂机构、转接座、支撑机构和检测装置。
62.衔接座2,固定连接于所述无人机1;
63.伸缩悬臂机构,铰接于所述衔接座2;
64.转接座,铰接于所述伸缩悬臂机构;
65.支撑机构8,固定连接于所述转接座,所述支撑机构8用于随着所述伸缩悬臂机构和转接座进行摆动;
66.检测装置7,固定连接于所述支撑机构8;
67.所述伸缩悬臂机构用于带动所述支撑机构8进行伸展或回缩。
68.本技术一些实施例中,所述伸缩悬臂机构包括第一连杆组件3、第二连杆组件4和弹性组件;第一连杆组件3一端铰接于所述衔接座2,另一端铰接于所述转接座;第二连杆组件4两端铰接于所述转接座;弹性组件一端固定连接于所述第一连杆组件3,另一端滑动连接于所述第二连杆组件4,所述弹性组件用于使所述第二连杆组件4伸缩。
69.本技术一些实施例中,所述转接座包括第一转接座5和第二转接座6;第一转接座5铰接于所述第一连杆组件3和所述第二连杆组件4,所述第一转接座5用于使所述第一连杆组件3和所述第二连杆组件4以所述第一转接座5为中心进行摆动;第二转接座6一端铰接于所述第二连杆组件4,另一端固定连接于所述支撑机构8,所述第二转接座6用于带动所述支撑机构8随所述第二连杆组件4摆动。
70.本技术一些实施例中,所述第一连杆组件3包括第一连接杆31和第二连接杆32;第一连接杆31一端铰接于所述衔接座2,另一端铰接于所述第一转接座5;第二连接杆32一端铰接于所述衔接座2,另一端铰接于所述第一转接座5,所述第二连接杆32上固定连接于所述弹性组件。
71.本技术一些实施例中,所述第二连杆组件4包括第三连接杆41和第四连接杆42;第三连接杆41一端铰接于所述第一转接座5,另一端铰接于所述第二转接座6,所述第三连接杆41上开设有滑槽;第四连接杆42一端铰接于所述第一转接座5,另一端铰接于所述第二转接座6。
72.本技术一些实施例中,所述弹性组件包括拉力弹簧43和环扣44;拉力弹簧43一端固定连接于所述第二连接杆32;环扣44滑动设置于所述滑槽中,使得环扣44在合理的行程
范围内滑动,环扣44为呈“d”形的结构,所述拉力弹簧43另一端挂接于所述环扣44,所述环扣44用于带动所述拉力弹簧43在所述滑槽内滑动。拉力弹簧43使第二连杆组件4具有伸缩的弹性。
73.本技术一些实施例中,所述衔接座2包括法兰板21和扭力弹簧22;法兰板21固定连接于所述无人机1,所述法兰板21铰接于所述第一连接杆31和所述第二连接杆32;扭力弹簧22抵接于所述法兰板21和所述第一连接杆31之间,使得第一连接杆31具有倾斜向前的弹性应力。
74.本技术一些实施例中,所述支撑机构8还包括永磁滚动珠83,所述永磁滚动珠83设置于所述安装座82两侧,所述永磁滚动珠83用于带动所述安装座82在管壁上滑动,从而使所述安装座82与所述检测装置7之间存在间隙。
75.本技术一些实施例中,所述检测装置7包括电磁超声探头,所述电磁超声探头固定连接于所述安装座82上,所述电磁超声探头用于对管壁厚度进行测量。
76.通过应用以上技术方案,本技术中无人机1通过法兰板21和扭力弹簧22带动第一连接杆31和第二连接杆32摆动,第一连接杆31和第二连接杆32通过第一转接座5带动第三连接杆41和第四连接杆42摆动,且第二连接杆32通过拉力弹簧43在滑槽里滑动,从而带动第三连接杆41,第三连接杆41和第四连接杆42通过第二转接座6带动安装座82滑动,安装座82上的永磁滚动珠83滑动在管道内壁上,使得电磁超声探头与管道壁面存在间隙。伸缩悬臂机构伸长时,扭力弹簧22被处于被压缩状态,拉伸弹簧处于被拉长状态。当无人机1完成缺陷或管道检测时,无人机1远离壁面,通过无人机1的拖拽使得探头与壁面分离。由于扭力弹簧22与拉伸弹簧分别处于压缩与拉伸状态,由弹簧的弹力使得伸缩悬臂机构收缩。
77.伸缩悬臂机构和支撑机构8可伸缩并对探头与壁面的触碰起到一定的缓冲作用。此外,采用电磁超声探头对管壁进行测厚时,测量探头磁性较大易与管壁磁吸附,吸附后需用较大拔起力使探头与管壁分离才能进行下一点的测量,因而需要对吸附力进行控制避免其影响无人机1的飞行,本发明安装带永磁性滚动珠的连接结构并通过其前端的永磁滚动珠83结构使笔式探头与测量壁面保持一定的间隙距离,可有效避免直接磁吸附,使吸附力控制在一定合理的范围内,使得机械臂前置的电磁超声探头可随无人机1的拖动在被测管壁上移动,完成测厚数据采集。
78.根据本技术的第一构思,改进了无人机1悬臂的转动结构,伸缩悬臂机构通过衔接座2连接无人机1,伸缩悬臂机构包括第一连杆组件3、第二连杆组件4和弹性组件,第一连杆组件3一端铰接于所述衔接座2,另一端铰接于所述转接座;第二连杆组件4两端铰接于所述转接座;弹性组件一端固定连接于所述第一连杆组件3,另一端滑动连接于所述第二连杆组件4,所述弹性组件用于使所述第二连杆组件4伸缩。通过扭力弹簧22、拉伸弹簧和多个连杆组成的伸缩结构实现测厚过程中机械臂的柔性伸缩过程,解决因接触壁面测厚中对飞行器的位置和姿态控制精度要求过高的问题。
79.根据本技术的第二构思,改进了无人机1与管壁的接触结构,支撑机构8连接伸缩悬臂机构,所述支撑机构8包括第五连接杆81、安装座82和永磁滚动珠83,第五连接杆81一端固定连接于所述第二转接座6;安装座82固定连接于所述第五连接杆81的另一端;永磁滚动珠83设置于所述安装座82两侧,所述永磁滚动珠83用于带动所述安装座82在管壁上滑动,从而使所述安装座82与所述检测装置7之间存在间隙。通过前端的永磁滚动珠83结构使
笔式电磁超声探头与测量壁面保持一定的间隙距离,可有效避免直接磁吸附,使吸附力控制在一定合理的范围内,使得支撑机构8前置的电磁超声探头可随无人机1的拖动在被测管壁上移动,完成测厚数据采集。
80.以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明技术原理的前提下,还可以做出若干改进和替换,这些改进和替换也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1