一种用于大狗机器人攀爬的激光扫描关节角度预控制方法
1.本发明涉及四足大狗机器人运动控制技术领域,尤其是一种用于大狗机器人攀爬的激光扫描关节角度预控制方法。
背景技术:
2.随着社会的发展,科技的进步,机器人作为一个朝阳产业,其正在不断地被应用到各个领域当中去。不同移动方式的机器人有着不同的优点,大狗机器人则有着独特的优点。无论是草原上奔驰的猎豹,还是在悬崖峭壁上攀岩的野山羊都表现出了四足动物非凡的运动能力。相比于生活中日常使用的汽车、自行车等交通运输工具,四足动物不仅可以高效、敏捷地运动,还可以凭借自身四足的优势以适应不同的地形。它们可以通过调整自身步态来适应不同的自然环境,或而疾跑或而跳跃,将如此出色的运动能力复制应用到机器人身上,可以使得大狗机器人的应用更加广泛;并且,随着人口老龄化问题日益严重,子女由于生活压力、工作等原因不能无时无刻的照顾和陪伴老人,空巢老人的现象备受社会关注,宠物陪伴机器人的方向应需而生,大狗机器人作为陪伴型机器人相对于其他移动机器人更容易被人们接受。
3.但是,由于大狗机器人应对楼梯、斜坡等各种复杂地面的控制相对复杂,目前已有的关于大狗机器人对阶梯斜坡等地形控制方法会实时进行地势图的绘制,能耗较大续航时间短,无法满足对于大狗机器人长时间的应用。目前,尚未有关于大狗机器人面对阶梯斜坡地形的预控制方法,无法满足对大狗机器人长续航时间和低能耗绿色环保的需求。因此,大狗机器人还未能广泛的进入到人们的生产生活中。
技术实现要素:
4.本发明的目的在于提供一种使大狗机器人在爬坡时或爬楼梯时提前做好各个关节的角度准备,能够灵活地应对特殊路面要求,在楼梯和斜坡路面平稳运行的用于大狗机器人攀爬的激光扫描关节角度预控制方法。
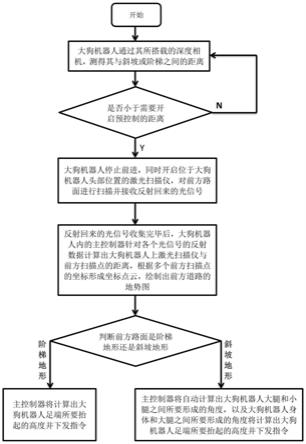
5.为实现上述目的,本发明采用了以下技术方案:一种用于大狗机器人攀爬的激光扫描关节角度预控制方法,该方法包括下列顺序的步骤:
6.(1)大狗机器人通过其所搭载的深度相机,测得深度相机与斜坡或阶梯之间的距离,并进行判断是否小于需要开启预控制的距离;
7.(2)若上一步的判断结果为是,则大狗机器人停止前进,同时开启位于大狗机器人头部位置的激光扫描仪,对前方路面进行扫描并接收反射回来的光信号;若上一步的判断结果为否,则返回步骤(1);
8.(3)反射回来的光信号收集完毕后,大狗机器人内的主控制器针对各个光信号的反射数据计算出大狗机器人上激光扫描仪与前方扫描点的距离,根据多个前方扫描点的坐标形成坐标点云,绘制出前方道路的地势图;
9.(4)在前方路面的地势图绘制完毕后,主控制器对前方路面的类型做出判断,判断
前方路面是阶梯地形还是斜坡地形;
10.(5)若上一步的判断结果为阶梯地形,主控制器计算出大狗机器人足端所要抬起的高度并下发指令;若上一步的判断结果为斜坡地形,主控制器自动计算出大狗机器人大腿和小腿之间所要形成的角度,以及大狗机器人身体和大腿之间所要形成的角度,计算得出的两个角度信息用于控制大狗机器人身体与斜坡平行。
11.所述步骤(1)中大狗机器人通过其所搭载的深度相机,测得其与斜坡或阶梯之间的距离具体是指:所述深度相机通过其左、右两个摄像头成像,将深度相机所采集的数据发送至主控制器,主控制器利用三角测量原理进行计算,得出深度相机中成像点与大狗机器人之间的距离,作为斜坡或阶梯与大狗机器人之间的距离,计算公式如下:
[0012][0013][0014]
式中,z为阶梯或斜坡上的前方扫描点与深度相机之间的距离,f为深度相机的焦距,t为深度相机左、右两摄像头的距离,x
l
为前方阶梯或斜坡上的前方扫描点在深度相机左摄像头上成像的横轴坐标,xr为前方阶梯或斜坡上的前方扫描点在深度相机右摄像头上成像的横轴坐标。
[0015]
所述步骤(3)具体是指:由步骤(2)采集到的光信号数据传输至主控制器进行计算,得出每个前方扫描点相对于激光扫描仪的坐标信息,由此建立坐标点云来描述前方道路的地势图,坐标点云的计算公式如下:
[0016]
x=scosαcosβ
[0017]
y=ssinαcosβ
[0018]
z=ssinβ
[0019]
式中,s为激光反射回来后前方扫描点到激光扫描仪的距离,α为激光扫描仪的激光反射镜在水平方向的旋转角度,β为激光扫描仪的激光反射镜在竖直方向的旋转角度,x为前方扫描点相对于激光扫描仪的x轴坐标值,y为前方扫描点相对于激光扫描仪的y轴坐标值,z为前方扫描点相对于激光扫描仪的z轴坐标值。
[0020]
所述步骤(4)具体是指:当主控制器绘制出前方路况地势图之后,自动判断前方路面是阶梯或者斜坡,并判断道路参数对于大狗机器人是否到达通过极限,若超出大狗机器人通过极限时,则立刻调整方向,规划一条新的路径,若未超过大狗机器人通过极限,则将前方道路类型和道路参数信息传入下一阶段操作中,所述道路信息包括阶梯的高度信息和斜坡的倾角信息;所述通过极限分为阶梯的通过极限和斜坡的通过极限,其中,阶梯的通过极限是指阶梯高度达到大狗机器人抬腿的最大高度,斜坡的通过极限是指斜坡的倾斜角度即坡度使得大狗机器人无法稳定站立于斜坡上,此时斜坡的坡度为大狗机器人的斜坡通过极限。
[0021]
所述步骤(5)具体是指:主控制器接收由步骤(4)测得的前方道路类型和道路参数信息;
[0022]
若为阶梯地形,主控制器将阶梯的高度信息传入大狗机器人步态规划中的腿部抬高参数中,给大狗机器人下发腿部指令以达到通过阶梯的目的;
[0023]
若为斜坡地形,主控制器将斜坡的倾角信息传入大狗机器人姿态控制中的俯仰角控制信号中,由该倾角信息在主控制器中计算出大狗机器人小腿和大腿间形成的夹角以及大狗机器人大腿和身体间的夹角,使大狗机器人在爬坡过程中始终保持身体与斜坡平面平行。
[0024]
由上述技术方案可知,本发明的有益效果为:第一,本发明首先通过深度相机测距和激光扫描仪绘制地形图实现了大狗机器人对周围环境的感知和绘制能力;第二,通过获取到的数据对大狗机器人爬坡时的预控制进行了设计,使得大狗机器人在在爬斜坡时或爬阶梯提前做好各个关节的角度准备,使得其灵活的应对特殊路面要求,做到在阶梯和斜坡路面也可以平稳运行。
附图说明
[0025]
图1为本发明的方法流程图;
[0026]
图2为大狗机器人的整体结构图;
[0027]
图3为三角测量原理示意图;
[0028]
图4为调整前重心位置示意图;
[0029]
图5为调整后重心位置示意图;
[0030]
图6为斜坡通过极限示意图。
具体实施方式
[0031]
如图1所示,一种用于大狗机器人攀爬的激光扫描关节角度预控制方法,该方法包括下列顺序的步骤:
[0032]
(1)大狗机器人1通过其所搭载的深度相机3,测得深度相机3与斜坡或阶梯之间的距离,并进行判断是否小于需要开启预控制的距离;
[0033]
(2)若上一步的判断结果为是,则大狗机器人1停止前进,同时开启位于大狗机器人1头部位置的激光扫描仪2,对前方路面进行扫描并接收反射回来的光信号;若上一步的判断结果为否,则返回步骤(1);
[0034]
(3)反射回来的光信号收集完毕后,大狗机器人1内的主控制器针对各个光信号的反射数据计算出大狗机器人1上激光扫描仪2与前方扫描点的距离,根据多个前方扫描点的坐标形成坐标点云,绘制出前方道路的地势图;
[0035]
(4)在前方路面的地势图绘制完毕后,主控制器对前方路面的类型做出判断,判断前方路面是阶梯地形还是斜坡地形;
[0036]
(5)若上一步的判断结果为阶梯地形,主控制器计算出大狗机器人1足端所要抬起的高度并下发指令;若上一步的判断结果为斜坡地形,主控制器自动计算出大狗机器人1大腿4和小腿5之间所要形成的角度,以及大狗机器人1身体和大腿4之间所要形成的角度,计算得出的两个角度信息用于控制大狗机器人1身体与斜坡平行。
[0037]
所述步骤(1)中大狗机器人1通过其所搭载的深度相机3,测得其与斜坡或阶梯之间的距离具体是指:所述深度相机3通过其左、右两个摄像头成像,将深度相机3所采集的数据发送至主控制器,主控制器利用三角测量原理进行计算,得出深度相机3中成像点与大狗机器人1之间的距离,作为斜坡或阶梯与大狗机器人1之间的距离,计算公式如下:
[0038][0039][0040]
式中,z为阶梯或斜坡上的前方扫描点与深度相机3之间的距离,f为深度相机3的焦距,t为深度相机3左、右两摄像头的距离,x
l
为前方阶梯或斜坡上的前方扫描点在深度相机3左摄像头上成像的横轴坐标,xr为前方阶梯或斜坡上的前方扫描点在深度相机3右摄像头上成像的横轴坐标。
[0041]
所述步骤(3)具体是指:由步骤(2)采集到的光信号数据传输至主控制器进行计算,得出每个前方扫描点相对于激光扫描仪2的坐标信息,由此建立坐标点云来描述前方道路的地势图,坐标点云的计算公式如下:
[0042]
x=scosαcosβ
[0043]
y=ssinαcosβ
[0044]
z=ssinβ
[0045]
式中,s为激光反射回来后前方扫描点到激光扫描仪2的距离,α为激光扫描仪2的激光反射镜在水平方向的旋转角度,β为激光扫描仪2的激光反射镜在竖直方向的旋转角度,x为前方扫描点相对于激光扫描仪2的x轴坐标值,y为前方扫描点相对于激光扫描仪2的y轴坐标值,z为前方扫描点相对于激光扫描仪2的z轴坐标值。
[0046]
所述步骤(4)具体是指:当主控制器绘制出前方路况地势图之后,自动判断前方路面是阶梯或者斜坡,并判断道路参数对于大狗机器人1是否到达通过极限,若超出大狗机器人1通过极限时,则立刻调整方向,规划一条新的路径,若未超过大狗机器人1通过极限,则将前方道路类型和道路参数信息传入下一阶段操作中,所述道路信息包括阶梯的高度信息和斜坡的倾角信息;所述通过极限分为阶梯的通过极限和斜坡的通过极限,其中,阶梯的通过极限是指阶梯高度达到大狗机器人1抬腿的最大高度,斜坡的通过极限是指斜坡的倾斜角度即坡度使得大狗机器人1无法稳定站立于斜坡上,此时斜坡的坡度为大狗机器人1的斜坡通过极限。
[0047]
所述步骤(5)具体是指:主控制器接收由步骤(4)测得的前方道路类型和道路参数信息;
[0048]
若为阶梯地形,主控制器将阶梯的高度信息传入大狗机器人1步态规划中的腿部抬高参数中,给大狗机器人1下发腿部指令以达到通过阶梯的目的;
[0049]
若为斜坡地形,主控制器将斜坡的倾角信息传入大狗机器人1姿态控制中的俯仰角控制信号中,由该倾角信息在主控制器中计算出大狗机器人1小腿5和大腿4间形成的夹角以及大狗机器人1大腿4和身体间的夹角,使大狗机器人1在爬坡过程中始终保持身体与斜坡平面平行。
[0050]
图2为大狗机器人1的整体结构,其中大腿4与身体间通过伺服电机实现大腿4与身体间的摆动,大腿4与小腿5间通过传动系统控制大腿4与小腿5间的摆动,大狗机器人1身体四角安装伺服电机,头部设置深度相机3和激光扫描仪2,主控制器位于大狗机器人1身体内部。
[0051]
如图3所示,图中z为阶梯或斜坡上的前方扫描点与深度相机3之间的距离,f为深
度相机3的焦距,t为深度相机3左、右两摄像头的距离,x
l
为前方阶梯或斜坡上的前方扫描点在深度相机3左摄像头上成像的横轴坐标,xr为前方阶梯或斜坡上的前方扫描点在深度相机3右摄像头上成像的横轴坐标,o
l
为深度相机3左摄像头中心坐标,or为深度相机3右摄像头中心坐标。
[0052]
图4为调整前重心位置示意图,即大狗机器人1在本发明调整前位于斜坡地势上的重心示意图,图4中可以看出大狗机器人1重心位于支撑面中心偏后的位置。
[0053]
图5为调整后重心位置示意图,即大狗机器人1在本发明调整后位于斜坡地势上的重心示意图,图5中可以看出大狗机器人1重心接近于支撑面中心位置。
[0054]
图6为斜坡通过极限示意图,即大狗机器人1在本发明调整后,通过斜坡的极限条件示意图,图6中可以看出大狗机器人1中心严重脱离支撑面中心,极易发生倾覆,所以此为大狗机器人1斜坡通过极限情况。
[0055]
图4、5、6中斜角φ是斜坡的倾角,虚线是辅助线,作用是将重心点和支撑点投影到平面。
[0056]
综上所述,本发明首先通过深度相机3测距和激光扫描仪2绘制地形图实现了大狗机器人1对周围环境的感知和绘制能力;通过获取到的数据对大狗机器人1爬坡时的预控制进行了设计,使得大狗机器人1在在爬斜坡时或爬阶梯提前做好各个关节的角度准备,使得其灵活的应对特殊路面要求,做到在阶梯和斜坡路面也可以平稳运行。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1