一种四点并进机械手机构
1.本发明涉及一种机械手机构,特别涉及一种四点并进机械手机构。
背景技术:
2.机械手在工业应用广泛,在传统的机械手机构中,通常需要多个电机单独驱动对应的机械手。在机械手常用于同步时需要反复调整,机械手抓取物体时需要计算物体大小,反复调整四个抓手,实现方式复杂,操作难度大,工作效率低下。
技术实现要素:
3.本发明提供了一种四点并进机械手机构,可以避免多个机械手系统协同工作时的复杂调整,极大地提高了工作效率,运行可靠,方便实用,易于实现。
4.本发明解决技术问题提供如下方案:
5.一种四点并进机械手机构,包括:电机、联轴器、传动轴、夹爪、连杆、传动盘、机架、圆柱螺母。
6.所述的电机通过螺丝固定于机架上。
7.所述的联轴器安装在传动轴与电机的输出轴之间。
8.所述的爪夹通过圆柱螺母安装在机架上并能在滑槽中移动。
9.所述的传动盘通过螺栓与连杆连接,连杆和爪夹通过圆柱螺母连接,连接部分可进行转动。
10.本发明结构简单,使用方便,在工业生产中代替传统复杂的传送带定位机构,减少成本,提高效率。
附图说明
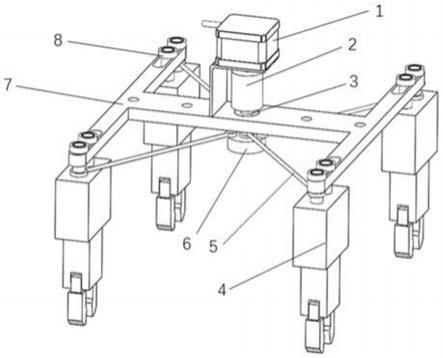
11.图1为本发明四点并进机械手机构极限外扩位置的示意图。
12.图2为本发明四点并进机械手机构极限内缩位置的示意图。
13.图中,1、电机;2、联轴器;3、传动轴;4、爪夹;5、连杆;6、传动盘;7、机架;8、圆柱螺母。
具体实施方式
14.下面结合附图通过实施例对本发明作进一步说明:
15.参照图1所示,电机1通过螺栓固定于机架7上,传动轴3通过联轴器2与电机1连接,传动盘6安装在传动轴3上,爪夹4通过圆柱螺母8安装在机架7上并能在滑槽中移动,传动盘6通过螺栓与连杆5连接,连杆5和爪夹4通过圆柱螺母8连接。
16.根据实际要求,电机1转动,电机1通过联轴器2带动传动轴3转动,传动轴3转动进而带动传动盘6转动,传动盘6带动与其相连的连杆5运动,连杆5进而带动另一固定端的爪夹4在机架7的滑槽内移动。同理,四点并进机械手会同时向外或向内移动。
技术特征:
1.一种四点并进机械手机构,包括:电机(1)、联轴器(2)、传动轴(3)、爪夹(4)、连杆(5)、传动盘(6)、机架(7)、圆柱螺母(8),其特征在于:电机(1)通过螺栓固定于机架(7)上,传动轴(3)通过联轴器(2)与电机(1)连接,传动盘(6)安装在传动轴(3)上,传动盘(6)通过螺栓与连杆(5)连接,连杆(5)和爪夹(4)通过圆柱螺母(8)连接,爪夹(4)通过圆柱螺母(8)安装在机架上并能在滑槽中移动,连杆套接在传动盘(6)和爪夹(4)上并通过螺丝固定,连接部分可进行转动。
技术总结
本发明公开了一种四点并进机械手机构,包括:电机、联轴器、传动轴、夹爪、连杆、传动盘、机架、圆柱螺母。所述的电机通过螺丝固定于机架上,联轴器安装在传动轴与电机的输出轴之间,爪夹通过圆柱螺母安装在机架上并能在滑槽中移动,连杆套接在传动盘和爪夹上并通过螺丝固定,连接部分可进行转动。当传动轴带动传动盘旋转时,连杆发生移动,在滑槽内定向移动,实现了四点并进运动。本发明结构简单,使用方便,在工业生产中代替传统复杂的传送带定位机构,减少成本、提高效率。提高效率。提高效率。
技术研发人员:曾华鹏 柯海森 朱勃旬 陈荣威 曹琳杰
受保护的技术使用者:中国计量大学
技术研发日:2022.03.24
技术公布日:2022/5/25
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1