一种高铁送餐机器人
1.本发明属于机器人领域,具体为一种高铁送餐机器人。
2.应用背景
3.近年来,中国的高铁事业取得了巨大的发展,已经完成的和正在建设的高铁正不断延伸至各个省份,高铁已经成为了人们外出旅行的交通选择之一。但方便交通的同时,高铁上的送餐问题也引起了大家的关注,传统送餐方式依靠工作人员手推餐车在过道中送餐,然而高铁通道狭窄,座位及乘客与餐车多有碰撞,为工作人员及旅客带来不必要的纠纷和困扰,且人工送餐效率低下,占用了大量的人力资源及时间。
4.本发明用机械代替人力,整个装置空间占比小,减少了送餐过程中可能出现的碰撞,移动机构以电机作为驱动力,利用齿轮间的啮合进行移动,大大提高了送餐速度,旋转机构及升降机构利用陀螺仪及液压杆的组合,使得送餐装置可进行360
°
的旋转和空间上的平移,方便不同方位的乘客取餐,障碍躲避机构将摄像机与多种传感器组合,对送餐轨道进行实时分析,降低误撞情况发生的可能性。本发明已经实现了自动化及智能化,不仅节约了大量的人力资源,还提高了送餐的效率,减少了空间上的碰撞。
技术实现要素:
5.本发明的目的是针对现有技术的不足,提供一种高铁送餐机器人,可克服现有送餐方式的缺陷。本发明所要解决的技术问题采用以下技术方案来实现。
6.一种高铁送餐机器人,包括移动机构、旋转机构、升降机构、载物机构以及障碍躲避机构,其特征在于:所述的移动机构包括所述的移动机构包括导轨、驱动齿轮、传动轴一、传动轴二、电机、电机支架、联轴器、传动齿轮一、传动齿轮二、从动齿轮、底座,所述的导轨中空,内侧底部两端分布锯齿状轨道,所述的驱动齿轮与轨道相互啮合,齿轮中心被传动轴一贯穿,所述的电机一侧与电机支架紧密贴合,另一侧通过传动轴二及联轴器与传动齿轮二连接,所述的电机支架与底座紧密连接,所述的传动齿轮二与传动轴贯穿的传动齿轮一相互啮合,所述的从动齿轮与导轨相互啮合,齿轮中心被传动轴一贯穿。
7.所述的旋转机构包括电机、法兰盘、电机外壳、联轴器、陀螺仪,所述的联轴器一端贯穿电机外壳,一端贯穿法兰盘中心与法兰盘固定连接,所述的电机整体被电机外壳包围,所述的陀螺仪嵌于法兰盘顶部同法兰盘固定连接。
8.所述的升降机构包括液压杆、气泵、液压杆支架、10mm六角螺钉、接头连杆、球头,所述的液压杆两端通过螺纹与接头连杆连接,液压杆旋紧部分设有小孔,通过与气泵卡合与气泵连接,所述的气泵开口处装有气泵卡环,所述的接头连杆通过球头和液压杆支架固定连接,球头可360
°
旋转使接头连杆与液压杆支架紧密贴合,所述的液压杆支架通过10mm六角螺钉与法兰盘连接。
9.所述的载物机构包括载物箱、箱门锁扣、转动轴、内箱卡扣、卡扣支架,所述的载物箱被分为空间大小不同的区块,不同区块间通过隔板格挡,载物箱箱门竖直方向上被转动轴贯穿,所述的箱门锁扣钉贴于箱门中部,两者通过螺钉连接,所述的卡扣支架贯穿载物箱
箱壁,所述的内箱卡扣被卡扣支架贯穿且可绕卡扣支架转动。
10.所述的障碍躲避机构包括摄像头一、摄像头二、红外线传感器、加速度传感器、光敏传感器、led灯,所述的摄像头一通过螺钉固定于载物箱顶部边缘处,所述的摄像机二通过螺钉固定于载物箱底部中心处,所述的红外线传感器嵌于载物箱底部,与摄像机二处于同一水平线,所述的加速度传感器嵌于载物箱底部,所述的光敏传感器嵌于载物箱底部,与加速度传感器相邻,所述的led灯通过螺钉固定于载物箱底部四角处。
11.所述的移动机构与旋转机构通过导轨组合连接,旋转机构的电机嵌于移动机构的导轨内部,电机外壁与导轨内壁紧密贴合固定。
12.所述的旋转机构与升降机构通过法兰盘固定,旋转机构的联轴器贯穿法兰盘中心,升降机构的液压杆支架底部与法兰盘底部紧密贴和,两者通过10mm六角螺钉固定。
13.所述的升降机构与载物机构通过转动杆组合连接,升降机构的液压杆支架底部与载物机构的载物箱顶部贴合,转动杆贯穿液压杆支架及载物箱连接两机构。
14.所述的载物机构与障碍躲避机构通过载物箱组合连接,障碍躲避机构的摄像机、光敏传感器、加速度传感器、红外线传感器、led灯嵌于载物机构的载物箱顶部及底部。障碍躲避机构同电脑或相关数据处理分析设备相连接。
15.本发明的有益效果是,与现有的送餐方式相比,本发明已经实现了自动化和智能化,节约了大量的人力资源,提高了送餐效率并且减少了送餐过程中送餐车同乘客座位之间不必要的碰撞,整个装置空间占比小,减少了送餐过程中可能出现的碰撞,移动机构以电机作为驱动力,利用齿轮间的啮合进行移动,大大提高了送餐速度,旋转机构及升降机构利用陀螺仪及液压杆的组合,使得送餐装置可进行360
°
的旋转和空间上的平移,方便不同方位的乘客取餐,障碍躲避机构将摄像机与多种传感器组合,对数据进行实时上传,并依赖相关数据处理及分析设备对送餐轨道进行实时分析,降低误撞情况发生的可能性。本发明已经实现了自动化及智能化,不仅节约了大量的人力资源,还提高了送餐的效率,减少了空间上的碰撞。
附图说明
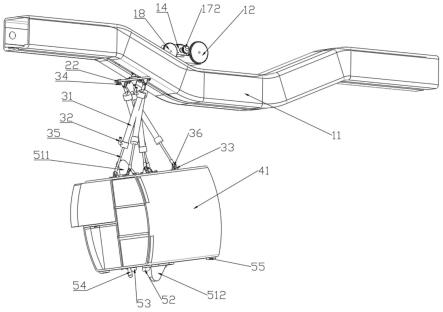
16.图1为本发明的总体机构示意图;
17.图2为本发明的移动机构示意图;
18.图3为本发明的旋转机构示意图;
19.图4为本发明的旋转机构中电机示意图
20.图5为本发明的升降机构示意图;
21.图6为本发明的升降机构部分示意图;
22.图7为本发明的升降机构中接头连杆与球头示意图;
23.图8为本发明的载物机构的示意图;
24.图9为本发明的障碍躲避机构的示意图;
具体实施方式
25.为了使本发明所实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施例和图示,进一步阐述本发明。
26.如图1和图2所示,一种高铁送餐机器人,包括移动机构1、旋转机构2、升降机构3、载物机构4以及障碍躲避机构5,其特征在于:所述的移动机构1包括导轨11、驱动齿轮12、、传动轴一131、传动轴二132、电机14、电机支架15、联轴器16、传动齿轮一171、传动齿轮二172、从动齿轮18、底座19,所述的导轨11中空,内侧底部两端分布锯齿状轨道,所述的驱动齿轮12与轨道相互啮合,齿轮中心被传动轴一131贯穿,所述的电机14一侧与电机支架15紧密贴合,另一侧通过传动轴二132及联轴器16与传动齿轮二172连接,所述的电机支架15与底座19紧密连接,所述的传动齿轮二172与传动轴一131贯穿的传动齿轮一171相互啮合,所述的从动齿轮18与导轨11相互啮合,齿轮中心被传动轴一131贯穿。
27.如图1、图2和图3所示,所述的旋转机构2包括电机21、法兰盘22、电机外壳23、联轴器24、陀螺仪25,所述的联轴器24一端贯穿电机外壳23,一端贯穿法兰盘22中心与法兰盘22固定连接,所述的电机21整体被电机外壳23包围,所述的陀螺仪25嵌于法兰盘22顶部同法兰盘22固定连接。
28.如图1、图4和图5所示,所述的升降机构3包括液压杆31、气泵32、液压杆支架33、10mm六角螺钉34、接头连杆35、球头36,所述的液压杆31两端通过螺纹与接头连杆35连接,液压杆35旋紧部分设有小孔,通过与气泵32卡合与气泵32连接,所述的气泵32开口处装有气泵卡环,所述的接头连杆35通过球头36和液压杆支架33固定连接,球头36可360
°
旋转使接头连杆35与液压杆支架33紧密贴合,所述的液压杆支架33通过10mm六角螺钉34与法兰盘22连接。
29.如图1和图6所示,所述的载物机构4包括载物箱41、箱门锁扣42、内箱卡扣43、卡扣支架44、转动轴45,所述的载物箱41被分为空间大小不同的区块,不同区块间通过隔板格挡,载物箱41箱门竖直方向上被转动轴45完全贯穿,所述的箱门锁扣42贴合与箱门中部,两者通过螺丝固定连接,所述的卡扣支架44贯穿载物箱41箱壁,所述的内箱卡扣43被卡扣支架44贯穿且可绕卡扣支架44转动。
30.如图1和图7所示,所述的障碍躲避机构5包括摄像头一511、摄像头二512、红外线传感器52、加速度传感器53、光敏传感器54、led灯55,所述的摄像头一511通过螺钉固定于载物箱41顶部边缘处,所述的摄像机二512贴于载物箱41底部中心处,两者通过螺钉固定,所述的红外线传感器52嵌于载物箱41底部,与摄像机二512处于同一水平线,所述的加速度传感器53嵌于载物箱41底部,所述的光敏传感器54嵌于载物箱41底部,与加速度传感器53相邻,所述的led灯55通过螺钉固定于载物箱41底部四角处。
31.所述的移动机构1与旋转机构2通过导轨11组合连接,旋转机构2的电机21嵌于移动机构1的导轨11内部,电机21外壁与导轨11内壁紧密贴合固定。
32.所述的旋转机构2与升降机构3通过法兰盘22固定,旋转机构2的联轴器24贯穿法兰盘22中心,升降机构3的液压杆支架33底部与法兰盘22底部紧密贴和,两者通过10mm六角螺钉34固定。
33.所述的升降机构3与载物机构4通过转动杆45组合连接,升降机构3的液压杆支架33底部与载物机构4的载物箱41顶部贴合,转动杆45贯穿液压杆支架33及载物箱41连接两机构。
34.所述的载物机构4与障碍躲避机构5通过载物箱41组合连接,障碍躲避机构5的摄像机51、光敏传感器52、加速度传感器53、红外线传感器54、led灯55嵌于载物机构4的载物
箱41顶部及底部。
35.以上显示和描述了本发明的基本原理、主要特征和优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入本发明要求保护的范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1