机器人及其运动控制方法、装置、电子设备和存储介质与流程
本公开涉及机器人控制,具体涉及一种机器人及其运动控制方法、装置、电子设备和存储介质。
背景技术:
1、近年来,机器人的相关技术发展越来越迅速,机器人可以实现越来越多的功能,从而在各个领域代替人类进行工作,将人类从繁重的劳动中解放出来。机器人的运动控制是机器人控制技术中较为重要的一项内容,运动控制就是控制机器人运动至目的地,例如构建运动区域内的高程图,并按照高程图显示的信息来控制机器人进行运动。相关技术中,构建高程图的效率和质量均较差,导致机器人的运动效率较低,运动稳定性较差。
技术实现思路
1、为克服相关技术中存在的问题,本公开实施例提供一种机器人及其运动控制方法、装置、电子设备和存储介质,用以解决相关技术中的缺陷。
2、根据本公开实施例的第一方面,提供一种机器人的运动控制方法,包括:
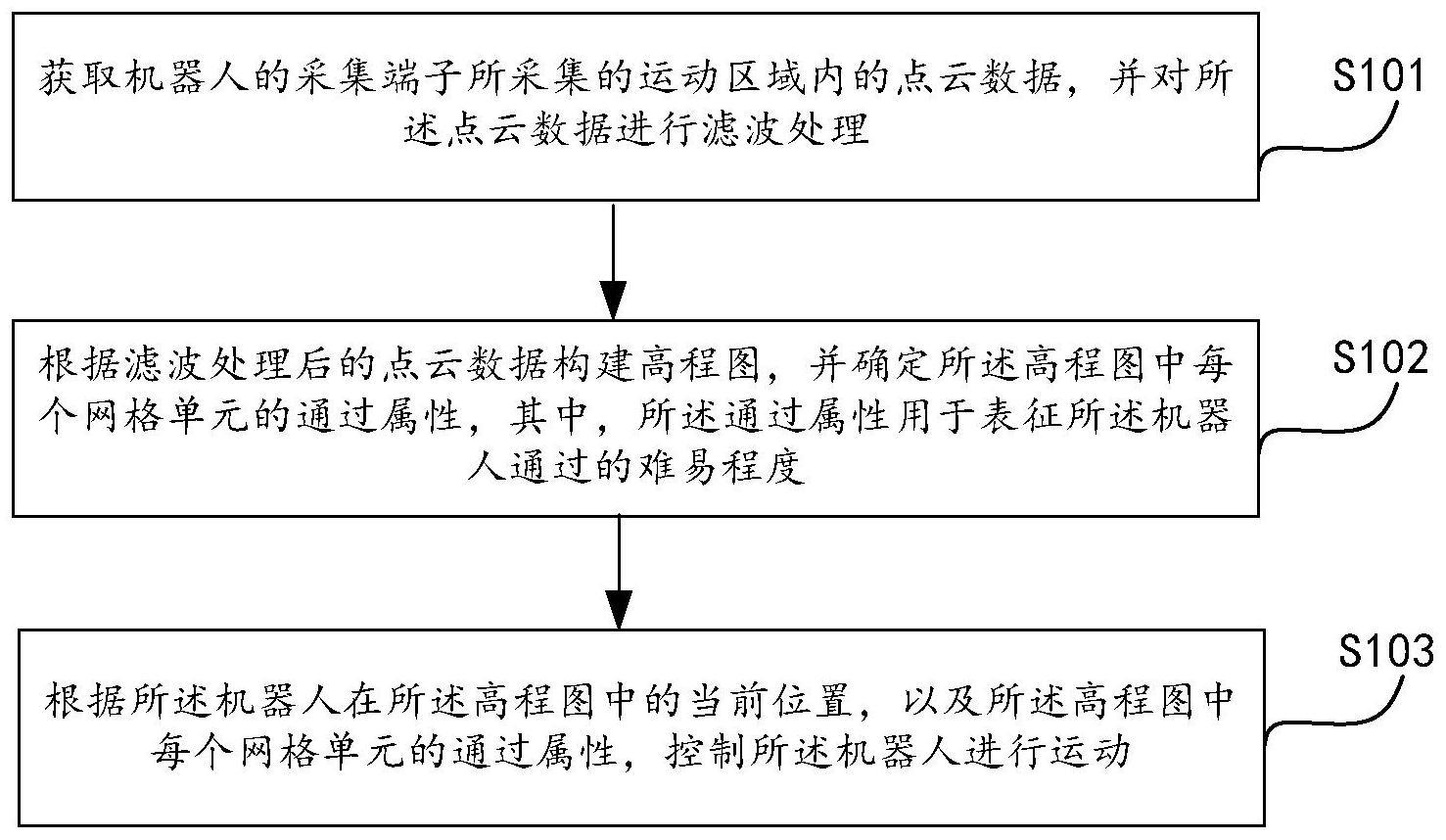
3、获取机器人的采集端子所采集的运动区域内的点云数据,并对所述点云数据进行滤波处理;
4、根据滤波处理后的点云数据构建高程图,并确定所述高程图中每个网格单元的通过属性,其中,所述通过属性用于表征所述机器人通过的难易程度;
5、根据所述机器人在所述高程图中的当前位置,以及所述高程图中每个网格单元的通过属性,控制所述机器人进行运动。
6、在一个实施例中,所述对所述点云数据进行滤波处理,包括:
7、将所述点云数据输入滤波器,以进行下述至少一项处理:边界限制、稀疏化、噪点去除。
8、在一个实施例中,所述根据滤波处理后的点云数据构建高程图,包括:
9、将水平面的每个坐标点对应的至少一个点云中高度最大的点云的高度信息,确定为对应坐标点的高度信息;
10、按照水平面内的预设方向,依次将相邻的预设数量的坐标点确定为一个网格单元,并将每个网格单元内的多个坐标点中高度最大的坐标点的高度信息,确定为对应网格单元的高度信息。
11、在一个实施例中,所述确定所述高程图中每个网格单元的通过属性,包括:
12、确定每个网格单元的领域范围内的多个网格单元的高度信息的通过参数,其中,所述网格单元的领域范围为以所述网格单元为中心的预设尺寸的范围,所述通过参数为所述多个网格单元的高度信息中的最大值与最小值之差,或所述多个网格单元的高度信息的标准差;
13、在某个网格单元对应的通过参数大于预设阈值的情况下,确定该网格单元的通过属性为不可通过;
14、在某个网格单元对应的通过参数小于或等于预设阈值的情况下,确定该网格单元的通过属性为可通过。
15、在一个实施例中,所述确定所述高程图中每个网格单元的通过属性,包括:
16、在某个网格单元的高度信息与所述机器人的高度信息的差值大于预设的高度阈值的情况下,确定该网格单元的通过属性为不可通过;
17、在某个网格单元的高度信息与所述机器人的高度信息的差值小于或等于预设的高度阈值的情况下,确定该网格单元的通过属性为可通过。
18、在一个实施例中,所述机器人为足式机器人,所述机器人在所述高程图中的当前位置包括所述机器人的每个脚的当前落脚点;
19、所述根据所述机器人在所述高程图中的当前位置,以及所述高程图中每个网格单元的通过属性,控制所述机器人进行运动,包括:
20、根据所述机器人的下一步对应的脚的当前落脚点,确定所述下一步对应的脚的名义落脚点;
21、在所述名义落脚点所处的网格单元的通过属性为可通过时,控制所述下一步对应的脚运动至所述名义落脚点;
22、在所述名义落脚点所处的网格单元的通过属性为不可通过时,确定与所述名义落脚点最近的一个通过属性为可通过的网格单元为实际落脚点,并控制所述下一步对应的脚运动至所述实际落脚点。
23、在一个实施例中,还包括:
24、在控制所述下一步对应的脚运动至所述名义落脚点或所述实际落脚点的过程中的起始时刻之后的预设时长内,根据所述高程度的更新结果对所述名义落脚点或所述实际落脚点进行更新,其中,所述预设时长包括:控制所述下一步对应的脚运动至所述名义落脚点或所述实际落脚点的过程的总时长的预设比例。
25、在一个实施例中,在所述控制所述下一步对应的脚运动至所述名义落脚点或所述实际落脚点之前,还包括:
26、根据所述下一步对应的脚的当前落脚点,与所述名义落脚点或所述实际落脚点的高度关系,控制所述机器人调整为对应的预备姿势。
27、在一个实施例中,所述根据所述下一步对应的脚的当前落脚点,与所述名义落脚点或所述实际落脚点的高度关系,控制所述机器人调整为对应的预备姿势,包括:
28、在所述当前落脚点低于所述名义落脚点或所述实际落脚点的情况下,控制所述下一步对应的脚所属的腿的根部关节抬高预设高度,其中,所述根部关节为所述腿的运动过程中的旋转轴;
29、在所述当前落脚点高于所述名义落脚点或所述实际落脚点的情况下,控制所述下一步对应的脚所属的腿的根部关节降低预设高度。
30、在一个实施例中,还包括:
31、在控制所述下一步对应的脚运动至所述名义落脚点或所述实际落脚点的过程中的起始时刻,获取机器人的里程计采集的第一高度值,以及所述高程图中所述当前落脚点的第二高度值;
32、根据所述高程图中所述名义落脚点或所述实际落脚点的第三高度值、所述第一高度值和所述第二高度值,确定所述里程计在所述名义落脚点或所述实际落脚点所采集的第四高度值;
33、根据所述里程计的第四高度值,控制所述下一步对应的脚运动至所述名义落脚点或所述实际落脚点。
34、根据本公开实施例的第二方面,提供一种机器人的运动控制装置,包括:
35、获取模块,用于获取机器人的采集端子所采集的运动区域内的点云数据,并对所述点云数据进行滤波处理;
36、构图模块,用于根据滤波处理后的点云数据构建高程图,并确定所述高程图中每个网格单元的通过属性,其中,所述通过属性用于表征所述机器人通过的难易程度;
37、运动模块,用于根据所述机器人在所述高程图中的当前位置,以及所述高程图中每个网格单元的通过属性,控制所述机器人进行运动。
38、在一个实施例中,所述获取模块用于对所述点云数据进行滤波处理时,具体用于:
39、将所述点云数据输入滤波器,以进行下述至少一项处理:边界限制、稀疏化、噪点去除。
40、在一个实施例中,所述构图模块用于根据滤波处理后的点云数据构建高程图时,具体用于:
41、将水平面的每个坐标点对应的至少一个点云中高度最大的点云的高度信息,确定为对应坐标点的高度信息;
42、按照水平面内的预设方向,依次将相邻的预设数量的坐标点确定为一个网格单元,并将每个网格单元内的多个坐标点中高度最大的坐标点的高度信息,确定为对应网格单元的高度信息。
43、在一个实施例中,所述构图模块用于确定所述高程图中每个网格单元的通过属性时,具体用于:
44、确定每个网格单元的领域范围内的多个网格单元的高度信息的通过参数,其中,所述网格单元的领域范围为以所述网格单元为中心的预设尺寸的范围,所述通过参数为所述多个网格单元的高度信息中的最大值与最小值之差,或所述多个网格单元的高度信息的标准差;
45、在某个网格单元对应的通过参数大于预设阈值的情况下,确定该网格单元的通过属性为不可通过;
46、在某个网格单元对应的通过参数小于或等于预设阈值的情况下,确定该网格单元的通过属性为可通过。
47、在一个实施例中,所述构图模块用于确定所述高程图中每个网格单元的通过属性时,具体用于:
48、在某个网格单元的高度信息与所述机器人的高度信息的差值大于预设的高度阈值的情况下,确定该网格单元的通过属性为不可通过;
49、在某个网格单元的高度信息与所述机器人的高度信息的差值小于或等于预设的高度阈值的情况下,确定该网格单元的通过属性为可通过。
50、在一个实施例中,所述机器人为足式机器人,所述机器人在所述高程图中的当前位置包括所述机器人的每个脚的当前落脚点;
51、所述运动模块具体用于:
52、根据所述机器人的下一步对应的脚的当前落脚点,确定所述下一步对应的脚的名义落脚点;
53、在所述名义落脚点所处的网格单元的通过属性为可通过时,控制所述下一步对应的脚运动至所述名义落脚点;
54、在所述名义落脚点所处的网格单元的通过属性为不可通过时,确定与所述名义落脚点最近的一个通过属性为可通过的网格单元为实际落脚点,并控制所述下一步对应的脚运动至所述实际落脚点。
55、在一个实施例中,所述运动模块还用于:
56、在控制所述下一步对应的脚运动至所述名义落脚点或所述实际落脚点的过程中的起始时刻之后的预设时长内,根据所述高程度的更新结果对所述名义落脚点或所述实际落脚点进行更新,其中,所述预设时长包括:控制所述下一步对应的脚运动至所述名义落脚点或所述实际落脚点的过程的总时长的预设比例。
57、在一个实施例中,所述运动模块还用于:
58、在所述控制所述下一步对应的脚运动至所述名义落脚点或所述实际落脚点之前,根据所述下一步对应的脚的当前落脚点,与所述名义落脚点或所述实际落脚点的高度关系,控制所述机器人调整为对应的预备姿势。
59、在一个实施例中,所述运动模块用于根据所述下一步对应的脚的当前落脚点,与所述名义落脚点或所述实际落脚点的高度关系,控制所述机器人调整为对应的预备姿势时,具体用于:
60、在所述当前落脚点低于所述名义落脚点或所述实际落脚点的情况下,控制所述下一步对应的脚所属的腿的根部关节抬高预设高度,其中,所述根部关节为所述腿的运动过程中的旋转轴;
61、在所述当前落脚点高于所述名义落脚点或所述实际落脚点的情况下,控制所述下一步对应的脚所属的腿的根部关节降低预设高度。
62、在一个实施例中,所述运动模块还用于:
63、在控制所述下一步对应的脚运动至所述名义落脚点或所述实际落脚点的过程中的起始时刻,获取机器人的里程计采集的第一高度值,以及所述高程图中所述当前落脚点的第二高度值;
64、根据所述高程图中所述名义落脚点或所述实际落脚点的第三高度值、所述第一高度值和所述第二高度值,确定所述里程计在所述名义落脚点或所述实际落脚点所采集的第四高度值;
65、根据所述里程计的第四高度值,控制所述下一步对应的脚运动至所述名义落脚点或所述实际落脚点。
66、根据本公开实施例的第二方面,提供一种机器人,所述机器人用于执行第一方面所述的机器人的运动控制方法。
67、根据本公开实施例的第四方面,提供一种电子设备,所述电子设备包括存储器、处理器,所述存储器用于存储可在处理器上运行的计算机指令,所述处理器用于在执行所述计算机指令时基于第一方面所述的机器人的运动控制方法。
68、根据本公开实施例的第五方面,提供一种计算机可读存储介质,其上存储有计算机程序,所述程序被处理器执行时实现第一方面所述的方法。
69、本公开的实施例提供的技术方案可以包括以下有益效果:
70、本公开通过获取机器人的采集端子所采集的运动区域内的点云数据,并对点云数据进行滤波处理,可以根据滤波处理后的点云数据构建高程图,并确定所述高程图中每个网格单元的通过属性,其中,所述通过属性用于表征所述机器人通过的难易程度,最后根据所述机器人在所述高程图中的当前位置,以及所述高程图中每个网格单元的通过属性,控制所述机器人进行运动。由于构建高程图的点云数据预先经过滤波处理,因此可以提高高程图的质量,避免存在失真的问题,而且可以降低构建高程图的计算量,即提高构建高程图的效率,加之高程图的每个网格单元均确定了通过属性,因此按照该高程图控制机器人的运动,效率较高,稳定性较强。
- 还没有人留言评论。精彩留言会获得点赞!