一种辅助林业割灌作业的有源外骨骼助力装置
1.本发明涉及助力机器人的技术领域,具体涉及一种辅助割灌作业的有源外骨骼机器人。
背景技术:
2.由于林业环境复杂多变,条件苛刻,导致林业工作者在使用割灌机进行工作时,容易造成疲劳,且长期使用还容易造成腰椎受损等职业病,本发明提供一种辅助林业割灌作业的有源外骨骼助力装置,通过各机构配合为林业割灌提供有效助力,降低林业工作者的劳动强度,提升工作效率。
技术实现要素:
3.本发明为解决传统林业割灌过程中的劳动强度大、容易疲劳、效率低的问题,提供一种辅助林业割灌作业的有源外骨骼助力装置。
4.为解决上述技术问题,本发明通过以下技术方案实现:
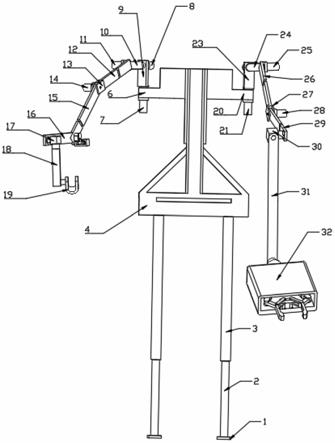
5.一种辅助林业割灌作业的有源外骨骼助力装置,包括背部支撑结构、腿部结构、左臂、右臂;所述背部支撑结构,包括背部托板5、背部支架4、肩关节支撑一6、肩关节支撑四20;所述背部托板5上固定有割灌机动力源;所述肩关节支撑一6、肩关节支撑四20和背部托板5均固定在背部支架4上;所述腿部结构,包括上支撑圆柱3、下支撑圆柱2、支撑板1;所述上支撑圆柱3固定连接在背部支架4上;所述上支撑圆柱3的内部设置有弹簧;所述弹簧固定连接在上支撑圆柱3的顶部;所述下支撑圆柱2连接在弹簧的下端,且下支撑圆柱2可以在上支撑圆柱3内部滑动;所述支撑板1固定连接在下支撑圆柱2的底部。
6.所述右臂包括电机一7、电机二8、肩关节支撑二9、肩关节支撑三10、电机三11、大臂杆一12、电机四14、肘关节支撑一13、小臂杆一15、右臂腕部支撑结构、延展支撑板16、托钩支撑一17、托钩支撑二18、u型托19;所述电机一7固定连接在肩关节支撑一6上;所述电机一7的输出轴与肩关节支撑二9相连接;所述电机二8固定连接在肩关节支撑二9上;所述电机二8的输出轴与肩关节支撑三10相连接;所述电机三11固定连接在肩关节支撑三10上;所述电机三11的输出轴与大臂杆一12相连接;所述肘关节支撑一13固定连接在大臂杆一12上;所述电机四14固定连接在肘关节支撑一13上;所述电机四14的输出轴与小臂杆一15相连接;所述延展支撑板16固定连接在小臂杆一15上;所述右臂腕部支撑结构,包括凹型托板支撑39、弹簧一40、弹簧二41、挡板一42、挡板二43;所述凹型托板支撑39内设置有凹槽;所述凹型托板支撑39通过销轴与小臂杆一15相连接,并且凹型托板结构39可绕销轴做旋转运动;所述弹簧一40的一端固定安装在凹型托板支撑39的左侧,另一端与挡板一42固定连接;所述弹簧二41的一端固定安装在凹型托板支撑39的右侧,另一端与挡板二43固定连接;所述挡板一42和挡板二43可在凹型托板支撑39的凹槽内自由滑动;所述托钩支撑一17固定于延展支撑板16上;所述托钩支撑二18通过销轴与托钩支撑一17相连接;所述u型托19通过销轴与托钩支撑二18相连接。
7.所述左臂包括电机五21、肩部支撑五23、电机六22、肩部支撑六24、电机七25、大臂杆二26、电机八28、肘关节支撑二27、小臂杆二29、夹持机械爪;所述电机五21固定连接在肩关节支撑四20上;所述电机五21的输出轴与肩关节支撑五23相连接;所述电机六22固定连接在肩关节支撑五23上;所述电机六22的输出轴与肩关节支撑六24相连接;所述电机七25固定连接在肩关节支撑六24上;所述电机七25的输出轴与大臂杆二26相连接;所述肘关节支撑二27固定连接在大臂杆二26上;所述电机八28固定连接在肘关节支撑二27上;所述电机八28的输出轴与小臂杆二29相连接;所述夹持机械爪,包括腕部导向支撑30、导向杆31、箱体32、气动肌肉一33、气动肌肉二34、连杆一35、连杆二36、执行机构一37、执行机构二38;所述腕部导向支撑30固定连接在小臂杆二29上;所述导向杆31的一端与腕部导向支撑30固定连接,另一端与箱体32相连接;所述气动肌肉一33和气动肌肉二34均与箱体32固定连接;所述执行机构一37通过连杆一35与气动肌肉一33相连接;所述执行机构一37通过销轴与箱体32相连接;所述执行机构二38通过连杆二36与气动肌肉二34相连接;所述执行机构二38通过销轴与箱体32相连接。
8.本发明的有益效果是:本发明提供一种辅助林业割灌作业的有源外骨骼助力装置,可以针对不同体型的工作者进行腿部长度和手臂长度的调节,满足不同体型人群的要求;通过电机提供动力,可以减轻人体工作强度;此装置操作简单,便于工作者使用。
附图说明
9.图1是本发明的结构示意图。
10.图2是图1的右视图。
11.图3是右臂腕部支撑结构示意图。
12.图4是箱体内部结构示意图。
13.附图中:
14.1—支撑板2—下支撑圆柱3—上支撑圆柱4—背部支架5—背部托板
15.6—肩关节支撑一7—电机一8—电机二9—肩关节支撑二10—肩关节支撑三
16.11—电机三12—大臂杆一13—肘关节支撑一14—电机四15—小臂杆一
17.16—延展支撑板17—托钩支撑一18—托钩支撑二19—u型托20—肩关节支撑四
18.21—电机五22—电机六23—肩部支撑五24—肩部支撑六25—电机七
19.26—大臂杆二27—肘关节支撑二28—电机八29—小臂杆二30—腕部导向支撑
20.31—导向杆32—箱体33—气动肌肉一34—气动肌肉二35—连杆一
21.36—连杆二37—执行机构一38—执行机构二39—凹型托板支撑40—弹簧一
22.41—弹簧二42—挡板一43—挡板二
具体实施方式
23.下面结合附图和具体实施方式对本发明做进一步描述,但它们不是对本发明的限制:
24.如图1、图2、图3和图4所示,一种辅助林业割灌作业的有源外骨骼助力装置,包括背部支撑结构、腿部结构、左臂、右臂;所述背部支撑结构,包括背部托板5、背部支架4、肩关
节支撑一6、肩关节支撑四20;所述背部托板5上固定有割灌机动力源;所述肩关节支撑一6、肩关节支撑四20和背部托板5均固定在背部支架4上;所述腿部结构,包括上支撑圆柱3、下支撑圆柱2、支撑板1;所述上支撑圆柱3固定连接在背部支架4上;所述上支撑圆柱3的内部设置有弹簧;所述弹簧固定连接在上支撑圆柱3的顶部;所述下支撑圆柱2连接在弹簧的下端,且下支撑圆柱2可以在上支撑圆柱3内部滑动;所述支撑板1固定连接在下支撑圆柱2的底部。
25.所述右臂包括电机一7、电机二8、肩关节支撑二9、肩关节支撑三10、电机三11、大臂杆一12、电机四14、肘关节支撑一13、小臂杆一15、右臂腕部支撑结构、延展支撑板16、托钩支撑一17、托钩支撑二18、u型托19;所述电机一7固定连接在肩关节支撑一6上;所述电机一7的输出轴与肩关节支撑二9相连接;所述电机二8固定连接在肩关节支撑二9上;所述电机二8的输出轴与肩关节支撑三10相连接;所述电机三11固定连接在肩关节支撑三10上;所述电机三11的输出轴与大臂杆一12相连接;所述肘关节支撑一13固定连接在大臂杆一12上;所述电机四14固定连接在肘关节支撑一13上;所述电机四14的输出轴与小臂杆一15相连接;所述延展支撑板16固定连接在小臂杆一15上;所述右臂腕部支撑结构,包括凹型托板支撑39、弹簧一40、弹簧二41、挡板一42、挡板二43;所述凹型托板支撑39内设置有凹槽;所述凹型托板支撑39通过销轴与小臂杆一15相连接,并且凹型托板结构39可绕销轴做旋转运动;所述弹簧一40的一端固定安装在凹型托板支撑39的左侧,另一端与挡板一42固定连接;所述弹簧二41的一端固定安装在凹型托板支撑39的右侧,另一端与挡板二43固定连接;所述挡板一42和挡板二43可在凹型托板支撑39的凹槽内自由滑动;所述托钩支撑一17固定于延展支撑板16上;所述托钩支撑二18通过销轴与托钩支撑一17相连接;所述u型托19通过销轴与托钩支撑二18相连接。
26.所述左臂包括电机五21、肩部支撑五23、电机六22、肩部支撑六24、电机七25、大臂杆二26、电机八28、肘关节支撑二27、小臂杆二29、夹持机械爪;所述电机五21固定连接在肩关节支撑四20上;所述电机五21的输出轴与肩关节支撑五23相连接;所述电机六22固定连接在肩关节支撑五23上;所述电机六22的输出轴与肩关节支撑六24相连接;所述电机七25固定连接在肩关节支撑六24上;所述电机七25的输出轴与大臂杆二26相连接;所述肘关节支撑二27固定连接在大臂杆二26上;所述电机八28固定连接在肘关节支撑二27上;所述电机八28的输出轴与小臂杆二29相连接;所述夹持机械爪,包括腕部导向支撑30、导向杆31、箱体32、气动肌肉一33、气动肌肉二34、连杆一35、连杆二36、执行机构一37、执行机构二38;所述腕部导向支撑30固定连接在小臂杆二29上;所述导向杆31的一端与腕部导向支撑30固定连接,另一端与箱体32相连接;所述气动肌肉一33和气动肌肉二34均与箱体32固定连接;所述执行机构一37通过连杆一35与气动肌肉一33相连接;所述执行机构一37通过销轴与箱体32相连接;所述执行机构二38通过连杆二36与气动肌肉二34相连接;所述执行机构二38通过销轴与箱体32相连接。
27.一种辅助林业割灌作业的有源外骨骼助力装置工作过程如下:在进行割灌时,将左臂和右臂分别通过魔术绑带固定在左手臂和右手臂上,将割灌机的动力源通过螺栓连接于背部支撑板上,将割灌机工作杆中间部分固定在凹型托板支撑的凹槽内,将割灌机工作杆前部放在u型托上,可小范围改变割灌方向。外骨骼助力装置背部支撑通过可调节背带穿戴于工作者背上。由于腿部上支撑圆柱内部有弹簧可以实现外骨骼腿部与人体长度一致,
且对于不同地形,如上坡、下坡,弹簧都可以进行自动调节长度;控制电机一的正转和反转可以实现人体右手肩关节的外展和内收运动,控制电机二的正转和反转可以实现人体右手肩关节内旋和外旋运动,控制电机三的正转和反转可以实现人体右手肩关节屈曲和伸展运动,控制电机四的正转和反转可以实现人体右手肘关节屈曲和伸展运动,控制电机五的正转和反转可以实现人体左手肩关节的外展和内收运动,控制电机六的正转和反转可以实现人体左手肩关节内旋和外旋运动,控制电机七的正转和反转可以实现人体左手肩关节屈曲和伸展运动,控制电机八的正转和反转可以实现人体左手肘关节屈曲和伸展运动。控制气动肌肉一和气动肌肉二的充气和放气可以实现机械爪的夹持和放松,从而实现夹持机械爪对灌木的夹持。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1