一种全R副三棱柱机器人
一种全r副三棱柱机器人
技术领域
1.本发明涉及多面体机器人,具体涉及一种全r副三棱柱机器人。本发明可用于侦察、探测、载运等领域。
背景技术:
2.三棱柱机器人相较于四面体机器人,不再采用正多面体结构,具有更加丰富的变形能力,移动步态更加丰富并且具有直线移动能力,针对不同地形更具灵活性。
3.中国专利申请cn103407508a公开一种十二自由度四面体机器人。机构由四个顶点组件和六个支链连接成一个整体的空间机构,通过12个舵机控制达到机构的变形,实现地面上的翻滚。但该机构步态单一且不能直线移动,由12个舵机驱动四自由度机构造成资源浪费。
4.中国专利申请cn108860353a公布了一种全转动副四面体移动机器人,该机器人由四个顶点和六个轴线平行的全转动副的支链组成,通过6个舵机的正、反转驱动支链的内翻、外翻控制机器人在地面移动,但该机器人仍然采用正四面体的整体外形结构,变形能力单调且步态单一。
技术实现要素:
5.本发明要解决的技术问题:在已有四面体机器人的基础上,以三棱柱、三棱台为整体外形,提供一种新的构型,能够具有更多的变形能力,更灵活地实现地面移动。
6.本发明的技术方案:三棱柱机器人包括第一顶点、第二顶点、第三顶点、第四顶点、第五顶点、第六顶点、第一支链、第二支链、第三支链、第四支链、第五支链、第六支链、第七支链、第八支链、第九支链。
7.所述的第一顶点由顶点支架、第一u型支架、第二u型支架、第三u型支架和转轴组成,顶点的三个u型支架相对顶点支架呈圆周阵列布置,转轴的轴线夹角为60
°
;所述第二顶点、第三顶点、第四顶点、第五顶点、第六顶点的结构和尺寸与第一顶点完全相同。
8.所述的第一支链由支链第一杆、支链第二杆组成;共三个转动副,且三条转动副轴线相互平行。
9.所述的第二支链、第三支链的结构和尺寸与第一支链完全相同;第四支链、第五支链、第六支链的结构和尺寸完全相同,与第一支链结构完全相同;第七支链、第八支链、第九支链的结构和尺寸完全相同,与第一支链结构完全相同;第四支链、第五支链、第六支链与第一支链尺寸相同时,机器人整体外形为三棱柱;第四支链、第五支链、第六支链与第一支链尺寸不同时,机器人整体外形为三棱台。
10.顶点和支链的连接关系为:
11.第一顶点上的三个u型支架分别和第一支链、第三支链、第七支链的任意一端通过转轴进行转动副连接;
12.第二顶点上的三个u型支架分别和第一支链、第二支链、第八支链的任意一端通过
转轴进行转动副连接;
13.第三顶点上的三个u型支架分别和第二支链、第三支链、第九支链的任意一端通过转轴进行转动副连接;
14.第四顶点上的三个u型支架分别和第四支链、第六支链、第七支链的任意一端通过转轴进行转动副连接;
15.第五顶点上的三个u型支架分别和第四支链、第五支链、第八支链的任意一端通过转轴进行转动副连接;
16.第六顶点上的三个u型支架分别和第五支链、第六支链、第九支链的任意一端通过转轴进行转动副连接;
17.所述的第一顶点包括顶点支架、第一u型支架、第二u型支架、第三u型支架和转轴组成;第一u型支架两侧设有通孔,用于与转轴连接形成转动副;第一u型支架底部设有通孔,用于与顶点支架通过螺钉固定;第一u型支架、第二u型支架、第三u型支架的结构和尺寸完全相同;顶点支架上设有第一螺纹孔、第二螺纹孔、第三螺纹孔;通过上述连接,使三个u型支架轴线共面,夹角互为60
°
,并可与支链进行转动连接。
18.所述的第一支链由支链第一杆、支链第二杆组成;其中支链第一杆包括第一连接板、第二连接板,通过螺栓与舵机舵盘连接孔固定;支链第二杆包括第三连接板、第四连接板,通过螺栓与舵机机体连接孔固定。
19.本发明的有益效果:本发明所述的三棱柱机器人的机构的自由度为7,属于空间多环耦合机构,具有刚度大、变形丰富的特点。三棱柱机器人顶点和支链便于模块化设计、采用多舵机驱动,可通过控制舵机的正、反转驱动支链内翻、外翻达到三棱柱机器人的变形及移动目的。三组支链的尺寸改变,使机器人呈现三棱柱或三棱台的结构特点,丰富构型和变形能力,移动步态丰富。可用于侦察、探测、载运等军事领域。
附图说明
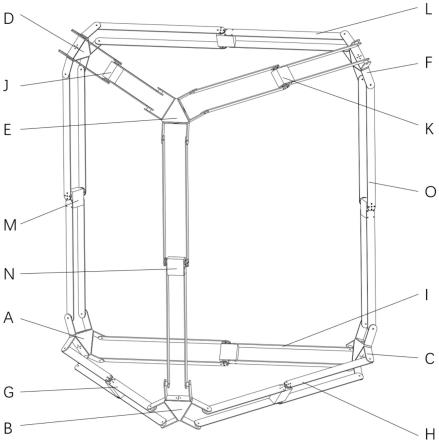
20.图1全r副三棱柱机器人整体三维图
21.图2全r副三棱柱机器人第一顶点整体三维图
22.图3全r副三棱柱机器人第一顶点u型支架三维图
23.图4全r副三棱柱机器人第一顶点顶点支架三维图
24.图5全r副三棱柱机器人第一支链整体三维图
具体实施方式
25.下面结合附图对本发明做进一步详细说明。
26.一种全r副三棱柱机器人,如图1所示,包括第一顶点(a)、第二顶点(b)、第三顶点(c)、第四顶点(d)、第五顶点(e)、第六顶点(f)、第一支链(g)、第二支链(h)、第三支链(i)、第四支链(j)、第五支链(k)、第六支链(l)、第七支链(m)、第八支链(n)、第九支链(o)。
27.所述的第一顶点(a)由顶点支架(a-1)、第一u型支架(a-2)、第二u型支架(a-3)、第三u型支架(a-4)和转轴组成,顶点的三个u型支架相对顶点支架(a-1)呈圆周阵列布置,转轴的轴线夹角为60
°
;所述第二顶点(b)、第三顶点(c)、第四顶点(d)、第五顶点(e)、第六顶点(f)的结构和尺寸与第一顶点(a)完全相同。
28.所述的第一支链(g)由支链第一杆(g-1)、支链第二杆(g-2)组成;共三个转动副,且三条转动副轴线相互平行。
29.所述的第二支链(h)、第三支链(i)的结构和尺寸与第一支链(g)完全相同;第四支链(j)、第五支链(k)、第六支链(l)的结构和尺寸完全相同,与第一支链(g)结构完全相同;第七支链(m)、第八支链(n)、第九支链(o)的结构和尺寸完全相同,与第一支链(g)结构完全相同;第四支链(j)、第五支链(k)、第六支链(l)与第一支链(g)尺寸相同时,机器人整体外形为三棱柱;第四支链(j)、第五支链(k)、第六支链(l)与第一支链(g)尺寸不同时,机器人整体外形为三棱台。
30.顶点和支链的连接关系为:
31.第一顶点(a)上的三个u型支架分别和第一支链(g)、第三支链(i)、第七支链(m)的任意一端通过转轴进行转动副连接;
32.第二顶点(b)上的三个u型支架分别和第一支链(g)、第二支链(h)、第八支链(n)的任意一端通过转轴进行转动副连接;
33.第三顶点(c)上的三个u型支架分别和第二支链(h)、第三支链(i)、第九支链(o)的任意一端通过转轴进行转动副连接;
34.第四顶点(d)上的三个u型支架分别和第四支链(j)、第六支链(l)、第七(m)支链的任意一端通过转轴进行转动副连接;
35.第五顶点(e)上的三个u型支架分别和第四支链(j)、第五支链(k)、第八支链(n)的任意一端通过转轴进行转动副连接;
36.第六顶点(f)上的三个u型支架分别和第五支链(k)、第六支链(l)、第九支链(o)的任意一端通过转轴进行转动副连接;
37.如图2所示,所述的第一顶点(a)包括顶点支架(a-1)、第一u型支架(a-2)、第二u型支架(a-3)、第三u型支架(a-4)和转轴组成;第一u型支架(a-2)如图3所示,两侧设有通孔(a-2-1),用于与转轴连接形成转动副;第一u型支架(a-2)底部设有通孔(a-2-2),用于与顶点支架(a-1)通过螺钉固定;第一u型支架(a-2)、第二u型支架(a-3)、第三u型支架(a-4)的结构和尺寸完全相同;顶点支架(a-1)上设有第一螺纹孔(a-1-1)、第二螺纹孔(a-1-2)、第三螺纹孔(a-1-3),如图4所示;通过上述连接,使三个u型支架轴线共面,夹角互为60
°
,并可与支链进行转动连接。
38.如图5所示,所述的第一支链(g)由支链第一杆(g-1)、支链第二杆(g-2)组成;其中支链第一杆(g-1)包括第一连接板(g-1-1)、第二连接板(g-1-2),通过螺栓与舵机舵盘连接孔固定;支链第二杆(g-2)包括第三连接板(g-2-3)、第四连接板(g-2-4),通过螺栓与舵机机体连接孔固定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1