仿形吸附式救援机器人及其使用方法
1.本发明属于救援机器人技术领域,特别涉及一种仿形吸附式救援机器人以及使用方法。
背景技术:
2.当火灾、爆炸等事故发生后,首要任务是对被困的幸存者实施有效的救援。对于救援人员而言,在灾难现场实施救援作业是十分危险的,救援人员往往是在灾难之中或者随时可能发生二次事故的恶劣环境下对用户进行救援,救援者的生命安全受到严重威胁。
3.现有的救援机器人在救援抱起过程中对人体形状的适应能力较弱,只能从人体侧下方进入进行承载无法利用人体上表面作业,因此会使得人体受力不均匀进而在救起和转运过程中对其造成二次伤害。如中国专利cn114179052a公开了一种用于伤者脱险转移的救援机器人,其通过机械抓手与传送组件的配合,可以将灾后复杂环境下丧失意识倒地的伤者托起并传送到安全舱内,然后救援机器人将伤者带出危险的环境,实现对伤者的脱险转移,但是不能实现对人体全方位施力,托抱安全性差;中国专利cn113246155a公开了一种救援机器人,只具有扫取和夹取两种工作状态,且不能对用户进行全方位包覆。因此,需要设计一种可替代人工进行救援且具有自适应功能的救援机器人,完成对用户的包覆、救起并减少二次事故对救援人员及用户的二次伤害。
技术实现要素:
4.针对现有技术存在的问题,本发明提供一种仿形吸附式救援机器人以及使用方法,可以自适应用户的人体形状,实现对用户的身体完全包覆全方位施力并吸附托抱,有利于在运输过程中对伤员提供多重保护。
5.本发明采用的技术方案是一种仿形吸附式救援机器人,多组吸附固定装置,每组吸附固定装置均包括多个吸附机械手和连接平台,相邻两个吸附机械手之间通过所述连接平台固定连接,且所述连接平台上设有转运吊耳,每个吸附机械手均包括左机械手、右机械手和承载板,且所述承载板与所述连接平台固定连接,所述左机械手和右机械手对称设于所述承载板的左右两侧,且所述左机械手和右机械手均包括驱动电机、主动齿轮、驱动连杆、从动齿轮、多级连杆单元、末端抓手、变刚度套管、拉簧绳组和刚性吸盘,所述驱动电机设于所述承载板上,且所述驱动电机的输出轴通过联轴器与所述主动齿轮连接,所述多级连杆单元的首尾两端分别与所述驱动连杆以及所述末端抓手转动连接,且所述驱动连杆的下端设有所述从动齿轮,所述从动齿轮与所述主动齿轮啮合传动,每级连杆单元均包括关节底板、短连杆和长连杆,首端连杆单元中的关节底板固定设于所述承载板上,且所述关节底板的前端与所述驱动连杆的下端转动连接,所述关节底板的后端与所述短连杆的下端转动连接,所述短连杆的上端与所述长连杆的后端转动连接,所述长连杆的前端与所述驱动连杆的上端转动连接,且相邻两级连杆单元中后一级连杆单元的长连杆的前端与前一级连杆单元的长连杆的后端以及短连杆的上端转动连接,所述后一级连杆单元的关节底板的前
端与所述前一级连杆单元的关节底板的后端以及短连杆的下端转动连接,所述多级连杆单元能以任意级数串联转动连接,且所述变刚度套管依次横穿连接所述多级连杆单元中的关节底板,且所述多级连杆单元中短连杆侧面的下端、短连杆侧面的中间部以及所述驱动连杆的下端均设有连杆侧滑轮,所述拉簧绳组设于所述多级连杆单元的一侧,且所述拉簧绳组的第一端固定于所述承载板上,所述拉簧绳组的第二端依次穿过设于所述承载板上的导向滑轮以及所述多级连杆单元中的连杆侧滑轮且与所述多级连杆单元的尾端连接,所述刚性吸盘对称设于所述多级连杆单元中关节底板底部的两侧,且所述刚性吸盘的一端与所述关节底板上吸盘进气孔的下端连接,所述关节底板上吸盘进气孔的上端与进气主管相连通。
6.进一步地,所述变刚度套管内侧设有加热线,且所述加热线通电加热能使所述变刚度套管受热变形。
7.优选地,所述驱动连杆上端的转动副轴线到所述驱动连杆下端的转动副轴线间的垂直距离等于所述短连杆上端的转动副轴线到所述短连杆下端的转动副轴线间的垂直距离,所述关节底板前端的转动副轴线到所述关节底板后端的转动副轴线间的垂直距离等于所述长连杆前端的转动副轴线到所述长连杆后端的转动副轴线间的垂直距离。
8.进一步地,所述拉簧绳组包括固定柱、拉绳和拉簧,所述固定柱设于所述承载板上,且所述拉簧的第一端与所述固定柱连接,所述拉簧的第二端与所述拉绳的第一端连接,且所述拉绳的第二端穿过所述导向滑轮以及所述多级连杆单元中的连杆侧滑轮且与所述多级连杆单元尾端连接。
9.优选地,所述关节底板上对称设有多个吸盘进气孔,且所述关节底板侧面的中间处设有贯穿于所述关节底板前后端的变刚度套管孔,所述变刚度套管穿过所述变刚度套管孔且与所述变刚度套管孔固定连接。
10.优选地,所述关节底板的上表面呈等腰梯形结构状,且所述相邻两级连杆单元中前一级连杆单元的关节底板的下底边长度与后一级连杆单元的关节底板的上底边长度相等。
11.本发明的第二方面,提供一种仿形吸附式救援机器人的使用方法,其包括以下步骤:
12.s1、通过转运吊耳将多组吸附固定装置放置于用户上;
13.s2、加热线通电,加热软化变刚度套管;
14.s3、待变刚度套管软化后,启动多个吸附机械手中的驱动电机,驱动电机能带动驱动连杆转动,在拉簧绳组的限制作用下,吸附机械手中多级连杆单元的首个关节底板率先触碰到用户,当驱动电机的扭矩逐渐大于拉簧绳组产生的扭矩时,多级连杆单元中的关节底板及末端抓手逐步触碰到用户,直至所述末端抓手到达用户的侧下方,驱动电机停止工作;
15.s4、启动气源,通过进气主管将所述刚性吸盘抽至真空状态,通过刚性吸盘将多个吸附机械手吸附固定于用户上;
16.s5、加热线断电,变刚度套管自然冷却硬化;
17.s6、待变刚度套管冷却硬化后,通过转运吊耳将用户转运至安全位置开展救援作业。
18.本发明的特点和有益效果是:
19.1、本发明提供的一种仿形吸附式救援机器人以及使用方法,吸附机械手中的多级连杆单元与拉簧绳组共同组成一种具有自适应能力的欠驱动机械手,在托抱用户时多级连杆单元中的关节底板可逐级与用户产生接触,自适应于人体形状,进而达到仿形的效果。
20.2、本发明提供的一种仿形吸附式救援机器人以及使用方法,多级连杆单元中关节底板的底部均设有刚性吸盘,当吸附机械手完成人体仿形并固定后,启动气源,通过进气主管将刚性吸盘抽至真空状态,实现吸附机械手吸附固定于用户上。
21.3、本发明提供的一种仿形吸附式救援机器人以及使用方法,变刚度套管依次横穿连接多级连杆单元中的关节底板,通电加热能使变刚度套管软化,有利于在托抱用户时吸附机械手可以活动自如,同时对用户完成托抱后,变刚度套管可以失电自然冷却硬化,有利于提高吸附机械手整体的承载能力。
附图说明
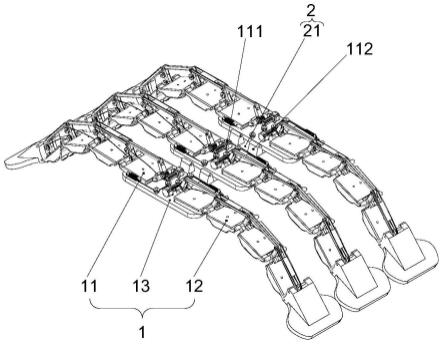
22.图1是本发明仿形吸附式救援机器人的整体结构示意图;
23.图2是本发明吸附机械手的整体结构示意图;
24.图3是本发明左机械手的主视图;
25.图4是本发明左机械手的俯视图;
26.图5是本发明左机械手的左视图;
27.图6是本发明关节底板结构示意图;
28.图7是本发明变刚度套管的结构示意图;
29.图8是本发明变刚度套管的剖视图;
30.图9是本发明吸附固定装置吸附于用户上的托抱示意图;
31.图10为本发明使用方法的流程图。
32.主要附图标记:
33.吸附机械手1;左机械手11;右机械手12;承载板13;驱动电机111;主动齿轮112;驱动连杆113;从动齿轮114;连杆单元115;关节底板1151;吸盘进气孔11511;变刚度套管孔11512;短连杆1152;长连杆1153;末端抓手116;变刚度套管117;加热线1171;拉簧绳组118;固定柱1181;拉绳1182;拉簧1183;刚性吸盘119;连杆侧滑轮120;导向滑轮121;连接平台2;转运吊耳21。
具体实施方式
34.为详尽本发明之技术内容、结构特征、所达成目的及功效,以下将结合说明书附图进行详细说明。
35.本发明提供一种仿形吸附式救援机器人,如图1所示,其包括多组吸附于用户上的吸附固定装置。
36.如图1~图5所示,每组吸附固定装置均包括多个吸附机械手1和连接平台2,相邻两个吸附机械手1之间通过连接平台2固定连接,且连接平台2上设有转运吊耳21,每个吸附机械手1均包括左机械手11、右机械手12和承载板13,且承载板13与连接平台2固定连接,左机械手11和右机械手12对称设于承载板13的左右两侧,且左机械手11和右机械手12均包括
驱动电机111、主动齿轮112、驱动连杆113、从动齿轮114、多级连杆单元115、末端抓手116、变刚度套管117、拉簧绳组118和刚性吸盘119,驱动电机111设于承载板13上,且驱动电机111的输出轴通过联轴器与主动齿轮112连接,多级连杆单元115的首尾两端分别与驱动连杆113以及末端抓手116转动连接,且驱动连杆113的下端设有从动齿轮114,从动齿轮114与主动齿轮112啮合传动,每级连杆单元115均包括关节底板1151、短连杆1152和长连杆1153,首端连杆单元115中的关节底板1151固定设于承载板13上,且关节底板1151的前端与驱动连杆113的下端转动连接,关节底板1151的后端与短连杆1152的下端转动连接,短连杆1152的上端与长连杆1153的后端转动连接,长连杆1153的前端与驱动连杆113的上端转动连接,且相邻两级连杆单元115中后一级连杆单元115的长连杆1153的前端与前一级连杆单元115的长连杆1153的后端以及短连杆1152的上端转动连接,后一级连杆单元115的关节底板1151的前端与前一级连杆单元115的关节底板1151的后端以及短连杆1152的下端转动连接,多级连杆单元115能以任意级数串联转动连接,且变刚度套管117依次横穿连接多级连杆单元115中的关节底板1151,且多级连杆单元115中短连杆1152侧面的下端、短连杆1152侧面的中间部以及驱动连杆113的下端均设有连杆侧滑轮120,拉簧绳组118设于多级连杆单元115的一侧,且拉簧绳组118的第一端固定于承载板13上,拉簧绳组118的第二端依次穿过设于承载板13上的导向滑轮121以及多级连杆单元115中的连杆侧滑轮120且与多级连杆单元115的尾端连接,刚性吸盘119对称设于多级连杆单元115中关节底板1151底部的两侧,且刚性吸盘119的一端与关节底板1151上吸盘进气孔11511的下端连接,关节底板1151上吸盘进气孔11511的上端与进气主管相连通。
37.在一种优选方式中,驱动连杆113上端的转动副轴线到驱动连杆113下端的转动副轴线间的垂直距离等于短连杆1152上端的转动副轴线到短连杆1152下端的转动副轴线间的垂直距离,关节底板1151前端的转动副轴线到关节底板1151后端的转动副轴线间的垂直距离等于长连杆1153前端的转动副轴线到长连杆1153后端的转动副轴线间的垂直距离。
38.如图2所示,拉簧绳组118包括固定柱1181、拉绳1182和拉簧1183,固定柱1181设于承载板13上,且拉簧1183的第一端与固定柱1181连接,拉簧1183的第二端与拉绳1182的第一端连接,且拉绳1182的第二端穿过导向滑轮121以及多级连杆单元115中的连杆侧滑轮120且与多级连杆单元115尾端连接。
39.如图4和图5所示,关节底板1151的上表面呈等腰梯形结构状,且相邻两级连杆单元115中前一级连杆单元115的关节底板1151的下底边长度与后一级连杆单元的关节底板1151的上底边长度相等。
40.如图6所示,关节底板1151上对称设有多个吸盘进气孔11511,且关节底板1151侧面的中间处设有贯穿于关节底板1151前后端的变刚度套管孔11512,变刚度套管117穿过变刚度套管孔11512且与变刚度套管孔11512固定连接。
41.如图7和图8所示,变刚度套管117内侧设有加热线1171,且加热线1171通电加热能使变刚度套管117受热变形。
42.本发明的第二方面,提供一种仿形吸附式救援机器人的使用方法,如图9和图10所示,其包括以下步骤:
43.s1、通过转运吊耳21将多组吸附固定装置放置于用户的胸部、腰部及腿部位置;
44.s2、加热线1171通电,加热软化变刚度套管117;
45.s3、待变刚度套管117完全软化后,启动多个吸附机械手1中的驱动电机111,驱动电机111能带动驱动连杆113转动,在拉簧绳组118的限制作用下,吸附机械手1中多级连杆单元115的首个关节底板1151率先触碰到用户,当驱动电机111的扭矩逐渐大于拉簧绳组118产生的扭矩时,多级连杆单元115中的关节底板1151及末端抓手116逐步触碰到用户,直至末端抓手116到达用户的侧下方,驱动电机111停止工作;
46.s4、启动气源,通过进气主管122将刚性吸盘119抽至真空状态,通过刚性吸盘119将多个吸附机械手1吸附固定于用户上;
47.s5、加热线1171断电,变刚度套管117自然冷却硬化;
48.s6、待变刚度套管117完全冷却硬化后,通过转运吊耳21将用户转运至安全位置开展救援作业。
49.本发明的具体操作步骤如下:
50.如图1~图10所示,本发明的一种仿形吸附式救援机器人的使用方法,在进行救援作业时,其包括以下步骤:
51.s1、由运输设备通过转运吊耳21将三组吸附固定装置运送到用户即待救援人员的上方,并逐渐向下移动至连接平台2触碰到人体,将三组吸附固定装置放置于待救援人员的胸部、腰部及腿部位置;
52.s2、加热线1171通电,加热软化变刚度套管117;
53.s3、待变刚度套管117完全软化后,启动多个吸附机械手1中的驱动电机111,驱动电机111能带动驱动连杆113转动,由于拉簧绳组118的限制作用会使得吸附机械手1近似为刚体,因此驱动电机111的转动会带动多级连杆单元115整体发生转动,进而使得多级连杆单元115的首个关节底板1151率先触碰到用户,随着驱动电机111的扭矩逐渐大于拉簧绳组118产生的扭矩时,由于多级连杆单元115的传动作用,会使多级连杆单元115中的关节底板1151及末端抓手116逐步触碰到用户,直至末端抓手116到达用户的侧下方,驱动电机111停止工作;
54.s4、启动气源,通过进气主管122将刚性吸盘119抽至真空状态,通过刚性吸盘119、将多个吸附机械手1吸附固定于用户上,实现吸附抓取运动;
55.s5、加热线1171断电,变刚度套管117自然冷却硬化;
56.s6、待变刚度套管117完全冷却硬化后,通过转运吊耳21将用户转运至安全位置开展救援作业。
57.当要对用户解除夹持时,继续将加热线1171通电,加热软化变刚度套管117,然后停止刚性吸盘119中的负压吸附,随后逆时针转动驱动电机111,使得吸附机械手1在拉簧绳组118和连杆单元115的联合作用下,脱离用户完成夹持解除动作,最后通过转运吊耳21转运吸附固定装置用于下一次救援作业。
58.以上所述的实施例仅是对本发明的优选实施方式进行描述,并非对本发明的范围进行限定,在不脱离本发明设计精神的前提下,本领域普通技术人员对本发明的技术方案做出的各种变形和改进,均应落入本发明的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1