一种遥控式水下扬沙装置
1.本发明涉及水下工作设备技术领域,尤其涉及一种遥控式水下扬沙装置。
背景技术:
2.水库通过对自然水源的合理分配,解决水资源短缺及供需不平衡等问题,为社会经济的各个方面与自然环境都带来了深远的影响。但随着时间的推移,水库泥沙淤积影响了水库的可持续性利用,降低了水库的蓄水能力,从而削弱了水库的流量调节能力,导致水库供水、能源和防洪等效益下降。随着我国对于环境保护的日益重视,以往针对城市内河道、湖泊的清淤方法已经日益落后,不能够满足国家对环境的施工方法要求。例如旧时的处理方法一般有:河道采用围堰抽水,然后清淤作业,缺点是耗时耗力,效率极低。湖泊主要采用绞吸式挖泥船施工,但是绞吸船容易对周围环境造成噪声污染。
3.专利(申请号:201120033884.7)公开了一种水下采沙装置,包括电机、沙泵、扬沙管、冲沙管和吸沙管,还包括电机油冷密封罩和磁联轴器,所述电机置于电机油冷密封罩内的油冷密封腔中;所述电机通过磁联轴器与所述沙泵传动连接。
4.上述方案中的水下采沙装置作业方式粗犷对周围环境污染较大,且智能化程度低,无法实时感知水下环境情况,作业不灵活,清沙效率低。
技术实现要素:
5.本发明的目的在于克服上述技术不足,提出一种遥控式水下扬沙装置,解决现有技术中的采沙装置作业方式粗犷对周围环境污染较大,且智能化程度低,无法实时感知水下环境情况,作业不灵活,清沙效率低的技术问题。
6.为达到上述技术目的,本发明的技术方案提供一种遥控式水下扬沙装置,包括:
7.水下机器人,包括浮游舱体、固定设置在所述浮游舱体内的控制器、无线通信模块、导航定位模块和设置在所述浮游舱体外的推进器、探测器、视频图像采集模块以及射流扬沙机构;所述控制器分别与所述无线通信模块、所述导航定位模块、所述推进器、所述探测器以及所述射流扬沙机构电性连接,所述无线通信模块还与所述视频图像采集模块电性连接;
8.水上分机,包括显控终端处理机和操控系统,所述显控终端处理机和所述操控系统均与所述无线通信模块电性连接。
9.进一步的,所述导航定位模块包括超声波雷达定位模块和北斗+gps双模定位模块。
10.进一步的,所述推进器包括对称设置在所述浮游舱体尾部两侧的推进螺旋桨。
11.进一步的,所述推进器还包括设置在所述浮游舱体顶部或者其两端或者其两侧的悬浮螺旋桨。
12.进一步的,所述探测包括固定安装在所述浮游舱体外壁四周的若干个用于生成水下环境地形图的三维成像声呐、若干个用于探测避障的前视声呐以及多波束探测仪。
13.进一步的,所述视频图像采集模块用于采集所述水下机器人周围的视频或图像。
14.进一步的,所述射流扬沙机构包括分别固定设置在所述浮游舱体内部的泵体和固定设置在所述浮游舱体外部的射流喷头,所述泵体的进水口通过管路与所述浮游舱体外部的水源相通,所述泵体的出口通过管路与所述射流喷头连接。
15.进一步的,所述射流喷头上固定设置有若干个锥直型喷嘴。
16.进一步的,所述浮游舱体还固定安装有喷头调节机构,所述喷头调节机构包括升降驱动件和固定设置在所述升降驱动件输出端的转动驱动件,所述转动驱动件的输出端与所述射流喷头固定连接,所述升降驱动件用于调整所述射流喷头的高度,所述转动驱动件用于调整所述射流喷头上喷嘴的朝向,以调节射流角度。
17.进一步的,所述浮游舱体的底部还固定安装有若干个支撑腿。
18.与现有技术相比,本发明的有益效果包括:
19.所述遥控式水下扬沙装置中,所述水下机器人中的所述导航定位模块能够获取位置信息,所述探测器能够获取水下环境地形图,所述视频图像采集模块能够获取一定范围内的视频或图像,所述无线通信模块能够将获取的各种信息传输至所述显控终端处理机上,水面上的工作人员能够通过所述显控终端处理机显示的信息操控所述操控系统以控制所述水下机器人到达指定的工作区域,所述射流扬沙机构能够在该工作区域产生射流以进行扬沙工作,从而将河床底部的泥沙扬动并通过水流带入下游,并且几乎不会产生噪音,对环境的污染也较小。
附图说明
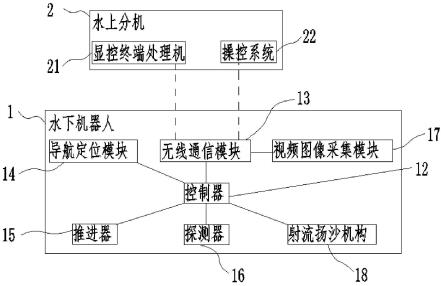
20.图1是本发明提供的一种遥控式水下扬沙装置的原理框图;
21.图2是本发明实施例中水下机器人的结构示意图;
22.图3是本发明实施例中水下机器人去掉浮游舱体后的结构示意图。
具体实施方式
23.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
24.本发明提供了一种遥控式水下扬沙装置,其结构如图1和图2所示,包括水下机器人1和水上分机2,所述水下机器人1包括浮游舱体11、固定设置在所述浮游舱体11内的控制器12、无线通信模块13、导航定位模块14和设置在所述浮游舱体11外的推进器15、探测器16、视频图像采集模块17以及射流扬沙机构18;所述控制器12分别与所述无线通信模块13、所述导航定位模块14、所述推进器15、所述探测器16以及所述射流扬沙机构18电性连接,所述无线通信模块13还与所述视频图像采集模块17电性连接;所述水上分机2包括显控终端处理机21和操控系统22,所述显控终端处理机21和所述操控系统22均与所述无线通信模块13电性连接。
25.所述遥控式水下扬沙装置中,所述水下机器人1中的所述导航定位模块14能够获取位置信息,所述探测器16能够获取水下环境地形图,所述视频图像采集模块17能够获取一定范围内的视频或图像,所述无线通信模块13能够将获取的各种信息传输至所述显控终
端处理机21上,水面上的工作人员能够通过所述显控终端处理机21显示的信息操控所述操控系统22以控制所述水下机器人1到达指定的工作区域,所述射流扬沙机构18能够在该工作区域产生射流以进行扬沙工作,从而将河床底部的泥沙扬动并通过水流带入下游,并且几乎不会产生噪音,对环境的污染也较小。
26.所述水下机器人1在水下作业时,各部分协同工作,感知周围环境,并以视频、图像、数字等形式在智能控制端展现,极大提升了水下机器人1的控制精度、工作精准性,降低了控制难度和碰撞危险。
27.作为具体的实施例,所述控制器12选用高性能低功耗的s3c1440微处理器,为保证系统的稳定性选用基于s3c1440de arm9处理器的集成控制板,同时选用一款基于stm32f103vct6处理器的stm32集成控制板,stm32集成控制板主要作为驱动控制中心,主要完成所述水下机器人1的姿态控制和信息采集等工作控制。当水下机器人1中的控制器12接收到水上分机2传来的指令时,通过串口将收到的指令发送给stm32集成控制板,使stm32集成控制板作出相关反应。
28.作为优选的实施例,所述导航定位模块14包括超声波雷达定位模块和北斗+gps双模定位模块。
29.作为优选的实施例,所述推进器15包括对称设置在所述浮游舱体11尾部两侧的推进螺旋桨151。作为优选的实施例,所述推进器15还包括设置在所述浮游舱体11顶部或者其两端或者其两侧的悬浮螺旋桨152。作为具体的实施例,为了实现所述推进螺旋桨151和所述悬浮螺旋桨152,所述浮游舱体11内固定设置有对应于所述推进螺旋桨151及所述悬浮螺旋桨152的动力系统,该动力系统类似于轮船上的螺旋桨的动力系统,因此关于该动力系统的组成在此不再赘述。
30.当所述水下机器人1需要转弯时,控制两个所述推进螺旋桨151以不同的转速运转,此时,所述水下机器人1会朝转速较低的所述推进螺旋桨151一侧转弯。当需要调整所述水下机器人1的姿态时,控制两个所述悬浮螺旋桨152以不同的转速运转,此时所述水下机器人1会朝转速较低的所述悬浮螺旋桨152一侧或一端下沉倾斜。
31.作为优选的实施例,所述探测器16包括固定安装在所述浮游舱体11外壁四周的若干个用于生成水下环境地形图的三维成像声呐、若干个用于探测避障的前视声呐以及多波束探测仪。所述三维成像声呐将探测的数据传输至所述控制器12并经所述控制器12分析后,可区分出水下一定范围内环境的障碍物位置,对环境信息进行全方位的探测。所述探测器16能够探测水下环境地形图,以便进一步自主规划作业路径,获取作业区域水深,来评估扬沙作业深度是否达到要求,以及在扬沙作业后对河(湖)床状况进行评估,对于需要进一步河床平复的区域进行标记,在扬沙作业结束后再进一步平复,同时具备探测动态障碍进行避障的功能。定位导航模块采用惯性导航系统(ins),用于引导扬沙作业沿着智能规划路径进行。
32.作为优选的实施例,所述视频图像采集模块17用于采集所述水下机器人1周围的视频或图像。
33.如图3所示是本发明实施例中水下机器人去掉浮游舱体1后的结构示意图,作为优选的实施例,所述射流扬沙机构18包括分别固定设置在所述浮游舱体11内部的泵体181和固定设置在所述浮游舱体11外部的射流喷头182,所述泵体181的进水口通过管路与所述浮
游舱体11外部的水源相通,所述泵体181的出口通过管路与所述射流喷头182连接。
34.作为优选的实施例,所述射流喷头182上固定设置有若干个锥直型喷嘴。
35.作为优选的实施例,所述浮游舱体11还固定安装有喷头调节机构19,所述喷头调节机构19包括升降驱动件191和固定设置在所述升降驱动件191输出端的转动驱动件192,所述转动驱动件192的输出端与所述射流喷头182固定连接,所述升降驱动件191用于调整所述射流喷头182的高度,所述转动驱动件192用于调整所述射流喷头182上喷嘴的朝向,以调节射流角度,使沙床冲蚀达到设计要求。作为具体的实施例,所述升降驱动件191为液压(或气压)驱动的伸缩杆,所述转动驱动件192可以为电机。
36.所述喷头调节机构19能够调节所述射流喷头182的高度和角度,以根据水下环境(比如泥沙厚度)调整所述射流喷头182的位置以及所述喷嘴的角度,使得沙床冲蚀达到设定条件(比如达到设定的深度),提高了扬沙效率。
37.作为优选的实施例,所述浮游舱体11的底部还固定安装有若干个支撑腿110,使得所述水下机器人1在进行扬沙作业时能够停留在河床上,减少其维持悬浮状态时的动力消耗。并且所述支撑腿110的高度可根据实际需要进行选择,以避免扬沙对所述水下机器人1产生不利影响。
38.为了方便地理解本发明,以下结合图1-图3对本方案的工作原理进行详细说明:
39.工作时,所述水下机器人1下沉,在下沉过程中所述三维成像声呐生成水下环境地形图传输给所述控制器12,同时,所述导航定位模块14工作向所述显控终端处理机21回传经纬度定位、行进方向等信息,并在所述显控终端处理机21上以地图定位点形式显示所述水下机器人1的位置状态信息。
40.当所述水下机器人1下沉至工作深度时,所述控制器12向所述悬浮螺旋桨152输出pwm信号,使所述水下机器人1保持悬浮姿态。同时所述控制器12控制所述射流扬沙机构18开始扬沙工作,所述升降驱动件191启动,下放所述射流喷头182,使沙床冲蚀达到工作要求,所述泵体181将抽吸的水通过所述射流喷头182喷出以破坏河(湖)床上的土体进行扬沙。
41.所述显控终端处理机21通过所述无线传输模块实时接收、分析、处理和显示所述水下机器人1发送的数据与视频信号,对采集的数据处理以及存储记录。所述显控终端处理机21还会根据探测的信息进行处理以得到图像自主规划扬沙行进路线,当扬沙深度未达到规划深度时继续工作,达到规划深度时则停止该处的扬沙作业,然后前进至下一个扬沙点开始作业。另外工人也可以通过所述操控系统22自主操作所述遥控式水下扬沙装置进行工作或选择路径。
42.本发明提供的一种遥控式水下扬沙装置具有以下有益效果:
43.(1)所述遥控式水下扬沙装置中,所述水下机器人1中的所述导航定位模块14能够获取位置信息,所述探测器16能够获取水下环境地形图,所述视频图像采集模块17能够获取一定范围内的视频或图像,所述无线通信模块13能够将获取的各种信息传输至所述显控终端处理机21上,水面上的工作人员能够通过所述显控终端处理机21显示的信息操控所述操控系统22以控制所述水下机器人1到达指定的工作区域,所述射流扬沙机构18能够在该工作区域产生射流以进行扬沙工作,从而将河床底部的泥沙扬动并通过水流带入下游,并且几乎不会产生噪音,对环境的污染也较小;
44.(2)所述喷头调节机构19能够调节所述射流喷头182的高度和角度,以根据水下环境(比如泥沙厚度)调整所述射流喷头182的位置以及所述喷嘴的角度,使得沙床冲蚀达到设定条件(比如达到设定的深度),提高了扬沙效率。
45.以上所述本发明的具体实施方式,并不构成对本发明保护范围的限定。任何根据本发明的技术构思所做出的各种其他相应的改变与变形,均应包含在本发明权利要求的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1