基于无线传感网络的果园智能管理机器人控制系统及方法
1.本发明涉及果园管理相关技术领域,具体涉及基于无线传感网络的果园智能管理机器人控制系统及方法。
背景技术:
2.传统种植业的生产过程需要种植人员的全程看护,并依赖管理人员的种植经验对农作物的不同生长状况采取浇水施肥除草驱虫等措施,但存在因技术不达标而出现水肥药利用率不高的现象,造成资源的浪费,更有甚者,还会导致作物食品安全性不达标而对公民人身健康造成损害。近年来,雾霾肆虐、河流被污染、我国80%的土地有不同程度的污染,资源和生态环境已经触到红线,面对恶劣的种植环境,仅凭管理人员的传统种植经验已经无法应对。农产品市场交易中的信息不对称现象十分明显,直接导致了农产品种类的种植面积、产量与价格剧烈波动,导致农产品丰产不丰收的情况。
技术实现要素:
3.本发明的目的在于提供基于无线传感网络的果园智能管理机器人控制系统及方法,以解决上述背景技术中提出的现有的问题。
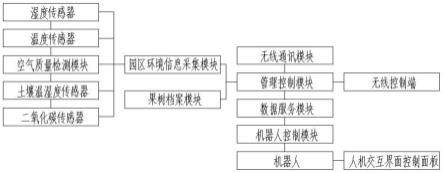
4.为实现上述目的,本发明提供如下技术方案:基于无线传感网络的果园智能管理机器人控制系统,包括管理控制模块、无线通讯模块、数据服务模块、机器人控制模块、园区环境信息采集模块、果树档案模块和无线控制端,所述园区环境信息采集模块、果树档案模块、无线通讯模块分别与管理控制模块进行连接,所述管理控制模块与数据服务模块进行连接,所述数据服务模块与机器人控制模块进行连接。
5.优选的,所述园区环境信息采集模块由湿度传感器、温度传感器、空气质量检测模块、土壤温湿度传感器和二氧化碳传感器组成。
6.优选的,所述管理控制模块用于给数据服务模块下发控制触发指令。
7.优选的,所述控制触发指令包括湿度触发指令、温度触发指令、空气质量触发指令、土壤温湿度触发指令和二氧化碳触发指令。
8.优选的,所述数据服务模块用于给机器人控制模块下发服务指令。
9.优选的,所述机器人控制模块用于控制机器人进行对应的操作,所述机器人上还设置有人机交互界面控制面板,用于操作人员直接操作。
10.优选的,所述果树档案模块用于为每棵果树构建生长模型、创立健康档案,记录果树的种植位置、品种、树龄、树高、生长状况、历年产量、历年经济效益数据;将实时检测每棵果树的生长状况,提供科学系统区别化的种植指导;在果树的生命周期内,从定植开始根据果树品种、果园的环境数据提供技术操作指导。
11.本发明的另一个目的是提供一种基于无线传感网络的果园智能管理机器人控制方法,操作人员可以通过无线控制端进行远程操作,通过园区环境信息采集模块进行园区环境信息的采集,将采集后的数据传输给管理控制模块,管理控制模块用于给数据服务模
块下发控制触发指令,从而实现数据服务模块给机器人控制模块进行服务指令的下发,从而实现对机器人的操作控制,同时,也可以直接的在人机交互界面操控面板上直接控制。
12.与现有技术相比,本发明的有益效果是:本发明通过设置园区环境信息采集模块,能够从环境温度、湿度、空气质量、土壤情况和空气中二氧化碳浓度这几个方面对园区内的生态环境进行实时监测,且通过监测得到的数据传输给管理控制模块,从而管理控制模块下发控制触发指令给到数据服务模块,数据服务模块下发服务指令给到机器人控制模块,从而实现对机器人的远程控制,从而保证园区内的生态环境是科学层面最适宜的生产环境,且所有操作都是机械化的操作,大大降低了人工成本,且所有操作均科学化,整体的种植均标准化,有效避免了因操作人员种植能力不均,导致的产能低下的问题。
附图说明
13.图1为本发明的整体结构示意图。
具体实施方式
14.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
15.如图1所示,本发明公开了一种基于无线传感网络的果园智能管理机器人控制系统,包括管理控制模块、无线通讯模块、数据服务模块、机器人控制模块、园区环境信息采集模块、果树档案模块和无线控制端,所述园区环境信息采集模块、果树档案模块、无线通讯模块分别与管理控制模块进行连接,所述管理控制模块与数据服务模块进行连接,所述数据服务模块与机器人控制模块进行连接。
16.可行的,所述园区环境信息采集模块由湿度传感器、温度传感器、空气质量检测模块、土壤温湿度传感器和二氧化碳传感器组成。
17.可行的,所述管理控制模块用于给数据服务模块下发控制触发指令。
18.可行的,所述控制触发指令包括湿度触发指令、温度触发指令、空气质量触发指令、土壤温湿度触发指令和二氧化碳触发指令。
19.可行的,所述数据服务模块用于给机器人控制模块下发服务指令。
20.可行的,所述机器人控制模块用于控制机器人进行对应的操作,所述机器人上还设置有人机交互界面控制面板,用于操作人员直接操作。
21.可行的,所述果树档案模块用于为每棵果树构建生长模型、创立健康档案,记录果树的种植位置、品种、树龄、树高、生长状况、历年产量、历年经济效益数据;将实时检测每棵果树的生长状况,提供科学系统区别化的种植指导;在果树的生命周期内,从定植开始根据果树品种、果园的环境数据提供技术操作指导。
22.一种基于无线传感网络的果园智能管理机器人控制方法,操作人员可以通过无线控制端进行远程操作,通过园区环境信息采集模块进行园区环境信息的采集,将采集后的数据传输给管理控制模块,管理控制模块用于给数据服务模块下发控制触发指令,从而实现数据服务模块给机器人控制模块进行服务指令的下发,从而实现对机器人的操作控制,
同时,也可以直接的在人机交互界面操控面板上直接控制。
23.本发明通过设置园区环境信息采集模块,能够从环境温度、湿度、空气质量、土壤情况和空气中二氧化碳浓度这几个方面对园区内的生态环境进行实时监测,且通过监测得到的数据传输给管理控制模块,从而管理控制模块下发控制触发指令给到数据服务模块,数据服务模块下发服务指令给到机器人控制模块,从而实现对机器人的远程控制,从而保证园区内的生态环境是科学层面最适宜的生产环境,且所有操作都是机械化的操作,大大降低了人工成本,且所有操作均科学化,整体的种植均标准化,有效避免了因操作人员种植能力不均,导致的产能低下的问题。
24.尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
技术特征:
1.基于无线传感网络的果园智能管理机器人控制系统,其特征在于:包括管理控制模块、无线通讯模块、数据服务模块、机器人控制模块、园区环境信息采集模块、果树档案模块和无线控制端,所述园区环境信息采集模块、果树档案模块、无线通讯模块分别与管理控制模块进行连接,所述管理控制模块与数据服务模块进行连接,所述数据服务模块与机器人控制模块进行连接。2.根据权利要求1所述的基于无线传感网络的果园智能管理机器人控制系统,其特征在于:所述园区环境信息采集模块由湿度传感器、温度传感器、空气质量检测模块、土壤温湿度传感器和二氧化碳传感器组成。3.根据权利要求1所述的基于无线传感网络的果园智能管理机器人控制系统,其特征在于:所述管理控制模块用于给数据服务模块下发控制触发指令。4.根据权利要求3所述的基于无线传感网络的果园智能管理机器人控制系统,其特征在于:所述控制触发指令包括湿度触发指令、温度触发指令、空气质量触发指令、土壤温湿度触发指令和二氧化碳触发指令。5.根据权利要求1所述的基于无线传感网络的果园智能管理机器人控制系统,其特征在于:所述数据服务模块用于给机器人控制模块下发服务指令。6.根据权利要求1所述的基于无线传感网络的果园智能管理机器人控制系统,其特征在于:所述机器人控制模块用于控制机器人进行对应的操作,所述机器人上还设置有人机交互界面控制面板,用于操作人员直接操作。7.根据权利要求1所述的基于无线传感网络的果园智能管理机器人控制系统,其特征在于:所述果树档案模块用于为每棵果树构建生长模型、创立健康档案,记录果树的种植位置、品种、树龄、树高、生长状况、历年产量、历年经济效益数据;将实时检测每棵果树的生长状况,提供科学系统区别化的种植指导;在果树的生命周期内,从定植开始根据果树品种、果园的环境数据提供技术操作指导。8.如权利要求1所述的基于无线传感网络的果园智能管理机器人控制方法,其特征在于:操作人员可以通过无线控制端进行远程操作,通过园区环境信息采集模块进行园区环境信息的采集,将采集后的数据传输给管理控制模块,管理控制模块用于给数据服务模块下发控制触发指令,从而实现数据服务模块给机器人控制模块进行服务指令的下发,从而实现对机器人的操作控制,同时,也可以直接的在人机交互界面操控面板上直接控制。
技术总结
本发明公开了基于无线传感网络的果园智能管理机器人控制系统及方法,包括管理控制模块、无线通讯模块、数据服务模块、机器人控制模块、园区环境信息采集模块、果树档案模块和无线控制端,园区环境信息采集模块、果树档案模块、无线通讯模块分别与管理控制模块进行连接,管理控制模块与数据服务模块进行连接。本发明通过设置园区环境信息采集模块,能够从环境温度、湿度、空气质量、土壤情况和空气中二氧化碳浓度方面对园区内的生态环境进行实时监测,且通过监测得到的数据传输给管理控制模块,从而管理控制模块下发控制触发指令给到数据服务模块,数据服务模块下发服务指令给到机器人控制模块,实现对机器人的远程控制。实现对机器人的远程控制。实现对机器人的远程控制。
技术研发人员:杨雨薇 高洁
受保护的技术使用者:南通理工学院
技术研发日:2022.05.31
技术公布日:2022/7/15
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1