一种基于识别模板的机械臂控制系统的制作方法
1.本发明涉及机械臂技术领域,更具体地说,涉及一种基于识别模板的机械臂控制系统。
背景技术:
2.机械臂是指高精度,多输入多输出、高度非线性、强耦合的复杂系统。因其独特的操作灵活性,已在工业装配、安全防爆等领域得到广泛应用,机械臂是一个复杂系统,存在着参数摄动、外界干扰及未建模动态等不确定性。因而机械臂的建模模型也存在着不确定性,对于不同的任务,需要规划机械臂关节空间的运动轨迹,从而级联构成末端位姿。
3.目前现有的基于识别模板的机械臂控制系统存在的缺陷是:功能性低,不能对机械臂设备进行远程控制操作,工作人员在机械臂设备周围进行操作,当夹取的物体在高空中掉落容易造成安全事故,安全性低,为此,我们提出一种基于识别模板的机械臂控制系统。
技术实现要素:
4.1、要解决的技术问题
5.本发明的目的在于提供一种基于识别模板的机械臂控制系统,以解决上述背景技术中提出的问题。
6.2、技术方案
7.一种基于识别模板的机械臂控制系统,包括旋转机构,所述旋转机构包括第一转轴、第一减速电机、联轴器、第一中空环状滑轨、第一弧形滑块和第一安装板,所述第一安装板的上表面中心位置安装有第一减速电机,所述第一安装板的下表面安装有第一中空环状滑轨,所述第一中空环状滑轨的底部两侧均安装有第一弧形滑块,所述第一减速电机的输出轴穿过第一安装板的表面并通过联轴器与第一转轴连接,所述旋转机构的底部设置有移动机构,所述移动机构包括360
°
全景摄像头、第二连接柱、第五安装板、第六安装板、导向杆、第三转轴、移动板、第三减速电机、第七安装板、第三连接柱、螺纹孔、通孔、第一锥形齿轮、第二锥形齿轮和第二侧板,所述第六安装板的底部通过第二连接柱与第五安装板连接,所述第六安装板的下表面两侧均安装有360
°
全景摄像头,所述第五安装板的下表面两侧均安装有第二侧板,所述第二侧板两两相邻之间设置有移动板,所述移动板的外壁中心位置开设有螺纹孔,所述螺纹孔内安装有第三转轴,所述第三转轴的两端均安装在第二侧板外壁上的轴承内,所述第五安装板的上表面一侧安装有第三减速电机,所述第三减速电机的输出轴贯穿第五安装板的表面与第二锥形齿轮连接,所述第二锥形齿轮与第一锥形齿轮啮合连接,所述第一锥形齿轮设置在第三转轴的外壁一侧,所述移动板的底部安装有第三连接柱,所述第三连接柱的另一端安装有第七安装板,所述第七安装板的下表面中心位置安装有第一液压缸,所述第一液压缸的底部设置有第一液压伸缩杆,所述第一液压伸缩杆的另一端安装有夹取机构,所述夹取机构包括第一连接柱、第二安装板、第二减速电机、第二
转轴、第三安装板、第二中空环状滑轨、第二弧形滑块、第四安装板、第一侧板、固定夹板、第二液压伸缩杆和第二液压缸,所述第三安装板的下表面四个拐角处均安装有第一连接柱,所述第一连接柱的另一端安装有第二安装板,所述第二安装板的上表面中心位置安装有第二减速电机,所述第二减速电机的输出轴贯穿第二安装板的表面并通过联轴器与第二转轴连接,所述第二转轴的另一端安装有第四安装板,所述第二安装板的底部设置有第二中空环状滑轨,所述第二中空环状滑轨的底部两侧均安装有第二弧形滑块,所述第二弧形滑块的底部安装在第四安装板的顶部,所述第四安装板的下表面两侧均安装有第一侧板,所述第一侧板的一侧外壁上安装有第二液压缸,所述第二液压缸的一侧外壁上设置有第二液压伸缩杆,所述第二液压伸缩杆的另一端安装有固定夹板。
8.优选地,所述第三转轴的外壁上设置有外螺纹,所述第三转轴外壁上的外螺纹与螺纹孔孔壁上的内螺纹之间为螺纹啮合连接,所述移动板的外壁前端和后端均开设有通孔,所述通孔内安装有导向杆,导向杆的外壁与通孔的孔壁之间为间隙连接,且导向杆的两端均安装在第二侧板的外壁上。
9.优选地,所述旋转机构上的第一弧形滑块的底部安装在移动机构上的第六安装板的顶部,所述旋转机构上的第一转轴的另一端安装在移动机构上的第六安装板的顶部。
10.优选地,所述控制箱的前端面设置有显示屏和控制面板,且显示屏位于控制面板的一侧,所述控制面板的前端面设置有控制按钮,所述控制箱的内部从左到右依次设置有、数据采集模块、数据处理模块、第一数据编码模块、第一无线通讯模块和第二数据解码模块。
11.优选地,所述360
°
全景摄像头的输出端与数据采集模块的输入端电性连接,所述数据采集模块的输出端与数据处理模块的输入端电性连接,所述数据处理模块的输出端与第一数据编码模块的输入端电性连接,所述第一数据编码模块的输出端与第一无线通讯模块的输入端电性连接,所述第一无线通讯模块的输出端与第二无线通讯模块的输入端无线信号连接,所述第二无线通讯模块的输出端与第一数据解码模块的输入端电性连接,所述第一数据解码模块的输出端与计算机的输入端电性连接。
12.优选地,所述计算机的输出端与第二数据编码模块的输入端电性连接,所述第二数据编码模块的输出端与第二无线通讯模块的输入端电性连接,所述第二无线通讯模块的输出端与第一无线通讯模块的输入端无线信号连接,所述第一无线通讯模块的输出端与第二数据解码模块的输入端电性连接,所述第二数据解码模块的输出端与单片机的输入端电性连接,所述单片机的输出端分别与第一减速电机、第二减速电机、第一液压缸、第二液压缸和第三减速电机的输入端电性连接。
13.3、有益效果
14.相比于现有技术,本发明的优点在于:本发明通过一系列结构的配合设置,360
°
全景摄像头可以实时拍摄本发明周围的环境,360
°
全景摄像头将拍摄的视频发送给数据采集模块,数据采集模块将视频信息发送给数据处理模块,数据处理模块将处理后的视频信息通过第一数据编码模块、第一无线通讯模块、第二无线通讯模块和第一数据解码模块发送给计算机,计算机前的工作人员可以实时观察到本发明周围的情况,计算机前的工作人员根据计算机观察到本发明周围的情况来发出控制指令,计算机发送的指令依次通过第二数据编码模块、第二无线通讯模块、第一无线通讯模块和第二数据解码模块发送给单片机,单
片机根据计算机发来的指令来控制第一减速电机、第二减速电机、第三减速电机、第一液压缸和第二液压缸的启动或关闭,从上述可知,本发明可以远程控制本发明进行工作,可以远离本发明进行操作,提高了安全性,操作使用方便,实用性强。
附图说明
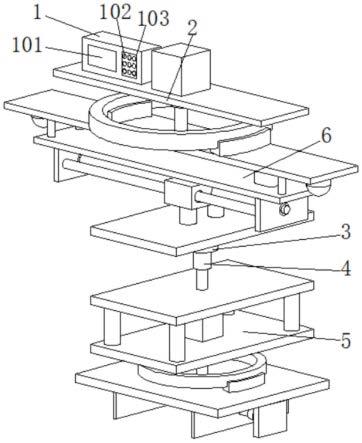
15.图1为本发明的整体结构示意图;
16.图2为本发明旋转机构的结构示意图;
17.图3为本发明夹取机构的结构示意图;
18.图4为本发明移动机构的结构示意图;
19.图5为本发明图4中的a处局部放大结构示意图;
20.图6为本发明控制箱的内部结构示意图;
21.图7为本发明的原理流程框图。
22.图中标号说明:1、控制箱;101、显示屏;102、控制按钮;103、控制面板;104、数据采集模块;105、数据处理模块;106、第一数据编码模块;107、第一无线通讯模块;108、第二数据解码模块;109、单片机;2、旋转机构;201、第一转轴;202、第一减速电机;203、联轴器;204、第一中空环状滑轨;205、第一弧形滑块;206、第一安装板;3、第一液压缸;4、第一液压伸缩杆;5、夹取机构;501、第一连接柱;502、第二安装板;503、第二减速电机;504、第二转轴;505、第三安装板;506、第二中空环状滑轨;507、第二弧形滑块;508、第四安装板;509、第一侧板;510、固定夹板;511、第二液压伸缩杆;512、第二液压缸;6、移动机构;601、360
°
全景摄像头;602、第二连接柱;603、第五安装板;604、第六安装板;605、导向杆;606、第三转轴;607、移动板;608、第三减速电机;609、第七安装板;610、第三连接柱;611、螺纹孔;612、通孔;613、第一锥形齿轮;614、第二锥形齿轮;615、第二侧板;7、第二无线通讯模块;8、第一数据解码模块;9、计算机;10、第二数据编码模块。
具体实施方式
23.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性拉动前提下所获得的所有其他实施例,都属于本发明保护的范围。
24.请参阅图1-7,本发明提供一种技术方案:
25.一种基于识别模板的机械臂控制系统,包括旋转机构2,旋转机构2包括第一转轴201、第一减速电机202、联轴器203、第一中空环状滑轨204、第一弧形滑块205和第一安装板206,第一安装板206的上表面中心位置安装有第一减速电机202,第一安装板206的下表面安装有第一中空环状滑轨204,第一中空环状滑轨204的底部两侧均安装有第一弧形滑块205,第一减速电机202的输出轴穿过第一安装板206的表面并通过联轴器203与第一转轴201连接,旋转机构2的底部设置有移动机构6,移动机构6包括360
°
全景摄像头601、第二连接柱602、第五安装板603、第六安装板604、导向杆605、第三转轴606、移动板607、第三减速电机608、第七安装板609、第三连接柱610、螺纹孔611、通孔612、第一锥形齿轮613、第二锥形齿轮614和第二侧板615,第六安装板604的底部通过第二连接柱602与第五安装板603连
接,第六安装板604的下表面两侧均安装有360
°
全景摄像头601,第五安装板603的下表面两侧均安装有第二侧板615,第二侧板615两两相邻之间设置有移动板607,移动板607的外壁中心位置开设有螺纹孔611,螺纹孔611内安装有第三转轴606,第三转轴606的两端均安装在第二侧板615外壁上的轴承内,第五安装板603的上表面一侧安装有第三减速电机608,第三减速电机608的输出轴贯穿第五安装板603的表面与第二锥形齿轮614连接,第二锥形齿轮614与第一锥形齿轮613啮合连接,第一锥形齿轮613设置在第三转轴606的外壁一侧,移动板607的底部安装有第三连接柱610,第三连接柱610的另一端安装有第七安装板609,第七安装板609的下表面中心位置安装有第一液压缸3,第一液压缸3的底部设置有第一液压伸缩杆4,第一液压伸缩杆4的另一端安装有夹取机构5,夹取机构5包括第一连接柱501、第二安装板502、第二减速电机503、第二转轴504、第三安装板505、第二中空环状滑轨506、第二弧形滑块507、第四安装板508、第一侧板509、固定夹板510、第二液压伸缩杆511和第二液压缸512,第三安装板505的下表面四个拐角处均安装有第一连接柱501,第一连接柱501的另一端安装有第二安装板502,第二安装板502的上表面中心位置安装有第二减速电机503,第二减速电机503的输出轴贯穿第二安装板502的表面并通过联轴器203与第二转轴504连接,第二转轴504的另一端安装有第四安装板508,第二安装板502的底部设置有第二中空环状滑轨506,第二中空环状滑轨506的底部两侧均安装有第二弧形滑块507,第二弧形滑块507的底部安装在第四安装板508的顶部,第四安装板508的下表面两侧均安装有第一侧板509,第一侧板509的一侧外壁上安装有第二液压缸512,第二液压缸512的一侧外壁上设置有第二液压伸缩杆511,第二液压伸缩杆511的另一端安装有固定夹板510,第三转轴606的外壁上设置有外螺纹,第三转轴606外壁上的外螺纹与螺纹孔611孔壁上的内螺纹之间为螺纹啮合连接,移动板607的外壁前端和后端均开设有通孔612,通孔612内安装有导向杆605,导向杆605的外壁与通孔612的孔壁之间为间隙连接,且导向杆605的两端均安装在第二侧板615的外壁上,旋转机构2上的第一弧形滑块205的底部安装在移动机构6上的第六安装板604的顶部,旋转机构2上的第一转轴201的另一端安装在移动机构6上的第六安装板604的顶部,控制箱1的前端面设置有显示屏101和控制面板103,且显示屏101位于控制面板103的一侧,控制面板103的前端面设置有控制按钮102,控制箱1的内部从左到右依次设置有、数据采集模块104、数据处理模块105、第一数据编码模块106、第一无线通讯模块107和第二数据解码模块108,360
°
全景摄像头601的输出端与数据采集模块104的输入端电性连接,数据采集模块104的输出端与数据处理模块105的输入端电性连接,数据处理模块105的输出端与第一数据编码模块106的输入端电性连接,第一数据编码模块106的输出端与第一无线通讯模块107的输入端电性连接,第一无线通讯模块107的输出端与第二无线通讯模块7的输入端无线信号连接,第二无线通讯模块7的输出端与第一数据解码模块8的输入端电性连接,第一数据解码模块8的输出端与计算机9的输入端电性连接,计算机9的输出端与第二数据编码模块10的输入端电性连接,第二数据编码模块10的输出端与第二无线通讯模块7的输入端电性连接,第二无线通讯模块7的输出端与第一无线通讯模块107的输入端无线信号连接,第一无线通讯模块107的输出端与第二数据解码模块108的输入端电性连接,第二数据解码模块108的输出端与单片机109的输入端电性连接,单片机109的输出端分别与第一减速电机202、第二减速电机503、第一液压缸3、第二液压缸512和第三减速电机608的输入端电性连接。
26.工作原理:使用时,接通外部电源,360
°
全景摄像头601可以实时拍摄本发明周围的环境,360
°
全景摄像头601将拍摄的视频发送给数据采集模块104,数据采集模块104将视频信息发送给数据处理模块105,数据处理模块105将处理后的视频信息通过第一数据编码模块106、第一无线通讯模块107、第二无线通讯模块7和第一数据解码模块8发送给计算机9,计算机9前的工作人员可以实时观察到本发明周围的情况,计算机9前的工作人员根据计算机9观察到本发明周围的情况来发出控制指令,计算机9发送的指令依次通过第二数据编码模块10、第二无线通讯模块7、第一无线通讯模块107和第二数据解码模块108发送给单片机109,单片机109根据计算机9发来的指令来控制第一减速电机202、第二减速电机503、第三减速电机608、第一液压缸3和第二液压缸512的启动或关闭,从上述可知,本发明可以远程控制本发明进行工作,可以远离本发明进行操作,提高了安全性,操作使用方便,实用性强。
27.以上显示和描述了本发明的基本原理、主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的仅为本发明的优选例,并不用来限制本发明,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1