一种智能机器人的机械零件的制作方法
本发明涉及智能机器人的机械零件,具体为一种智能机器人的机械零件。
背景技术:
1、机器人在安装的过程中,会在两个机械零件的接头处安装伸缩节,以便对两个机械零件进行连通,现有的部分伸缩节在进行长度调节时,需要安装多个螺帽对伸缩节进行固定和调节,导致伸缩节的调节比较麻烦,同时调节部位多数采用波纹管进行设置,导致伸缩节的长度调节范围较小,同时波纹管的制作工艺也比较复杂,损坏后比较维修,导致伸缩节的制作成本较高。
技术实现思路
1、针对背景技术的不足,本发明提供了一种智能机器人的机械零件,解决了上述背景技术提出的问题。
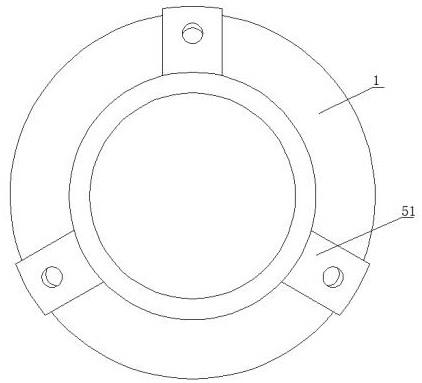
2、本发明提供如下技术方案:一种智能机器人的机械零件,包括一侧内部设置有安装孔的第一套管,所述第一套管一端的内部螺纹套接有连接套,所述连接套的内部活动套接有第二套管,所述第二套管远离连接套的一端内部螺纹套接有一侧内部设置有安装孔的转接套,所述转接套的外侧通过调节机构与第一套管之间进行固定连接。
3、优选的,所述连接套的内部套装有活动套接在第二套管外侧的第一密封层。
4、优选的,所述第二套管位于第一套管内侧的一端设置有活动套接在第一套管内部的环形凸台,且环形凸台的外侧套装有活动套接在第一套管内部的第二密封层。
5、优选的,所述转接套与第二套管之间套装有第三密封层。
6、优选的,所述调节机构包括设置在第一套管外侧上的固定板和一端活动套接在转接套内部的丝杆,所述丝杆延伸出转接套外部的一端螺纹套接有螺纹套,且丝杆延伸出螺纹套外部的一端与固定板的内部螺纹套接。
7、优选的,所述固定板的数量为三个,且三个固定板环形等距分布在第一套管上。
8、本发明具备以下有益效果:
9、1、该智能机器人的机械零件,通过第一套管、连接套和第二套管的配合使用,使得伸缩节中的波纹管替换成两个圆筒式套管,进而智能机器人的机械零件简化了伸缩节的制作工艺,在降低成本的同时增大了长度的调节范围,方便安装使用。
10、2、该智能机器人的机械零件,通过固定板、丝杆和螺纹套的配合使用,使得伸长节可通过松动螺纹套直接转动丝杆直接对伸缩节的长度进行调节,十分方便快捷,解决了部分伸缩节在进行长度调节时,需要安装多个螺帽对伸缩节进行固定和调节,导致伸缩节的调节比较麻烦的问题。
技术特征:
1.一种智能机器人的机械零件,包括一侧内部设置有安装孔的第一套管(1),其特征在于:所述第一套管(1)一端的内部螺纹套接有连接套(2),所述连接套(2)的内部活动套接有第二套管(3),所述第二套管(3)远离连接套(2)的一端内部螺纹套接有一侧内部设置有安装孔的转接套(4),所述转接套(4)的外侧通过调节机构(5)与第一套管(1)之间进行固定连接。
2.根据权利要求1所述的一种智能机器人的机械零件,其特征在于:所述连接套(2)的内部套装有活动套接在第二套管(3)外侧的第一密封层。
3.根据权利要求1所述的一种智能机器人的机械零件,其特征在于:所述第二套管(3)位于第一套管(1)内侧的一端设置有活动套接在第一套管(1)内部的环形凸台,且环形凸台的外侧套装有活动套接在第一套管(1)内部的第二密封层。
4.根据权利要求1所述的一种智能机器人的机械零件,其特征在于:所述转接套(4)与第二套管(3)之间套装有第三密封层。
5.根据权利要求1所述的一种智能机器人的机械零件,其特征在于:所述调节机构(5)包括设置在第一套管(1)外侧上的固定板(51)和一端活动套接在转接套(4)内部的丝杆(52),所述丝杆(52)延伸出转接套(4)外部的一端螺纹套接有螺纹套(53),且丝杆(52)延伸出螺纹套(53)外部的一端与固定板(51)的内部螺纹套接。
6.根据权利要求5所述的一种智能机器人的机械零件,其特征在于:所述固定板(51)的数量为三个,且三个固定板(51)环形等距分布在第一套管(1)上。
技术总结
本发明涉及智能机器人的机械零件技术领域,且公开了一种智能机器人的机械零件,包括一侧内部设置有安装孔的第一套管,所述第一套管一端的内部螺纹套接有连接套。该智能机器人的机械零件,通过第一套管、连接套和第二套管的配合使用,使得伸缩节中的波纹管替换成两个圆筒式套管,进而智能机器人的机械零件简化了伸缩节的制作工艺,在降低成本的同时增大了长度的调节范围,方便安装使用。通过固定板、丝杆和螺纹套的配合使用,使得伸长节可通过松动螺纹套直接转动丝杆直接对伸缩节的长度进行调节,十分方便快捷,解决了部分伸缩节在进行长度调节时,需要安装多个螺帽对伸缩节进行固定和调节,导致伸缩节的调节比较麻烦的问题。
技术研发人员:请求不公布姓名
受保护的技术使用者:南通达雷斯智能装备科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!