一种兼具运动精度与稳定性的六自由度混合导纳控制方法
本发明涉及机器人人机交互柔顺控制与实时跟踪,尤其涉及一种兼具运动精度与柔顺控制稳定性的六自由度混合导纳控制方法。
背景技术:
1、当今社会,人与机器人的协同交互已成为重要研究内容。在与人协同交互的过程中,若机器人只具备位置运动能力,而无相关接触力信息,则无法保障交互中操作人员的安全性,因此将力信息融入机器人控制系统即实现机器人柔顺控制成为重要的研究方向。
2、柔顺控制分为被动柔顺控制与主动柔顺控制。被动柔顺控制指通过改变机构的弹性(如在末端加入弹簧等)方式实现柔顺;而主动柔顺指通过控制策略实现机器人对力的主动响应。被动柔顺方式难以实现精确控制,适用性不高。关于主动柔顺控制的研究,主要包括导纳控制、阻抗控制和力位混合控制。由于当前大多工业机器人不具备力矩控制方式,仅允许位置控制,而导纳控制最终通过位置内环进行控制,因此导纳控制应用更广。
3、实际应用中,当进行遥操作或轨迹跟踪等相关操作时,既需要保证无外界接触力时轨迹跟踪的实时性和精确性,又需要实现有接触力时的主动避让柔顺特性。导纳控制中,需将当前位置与规划位置的偏差代入导纳控制微分方程中以求解下一周期的目标位置。由于协作机器人无法在单个控制周期内到达目标位置,导致控制策略中对于当前机器人位置的不同估计将产生不同的控制效果。
技术实现思路
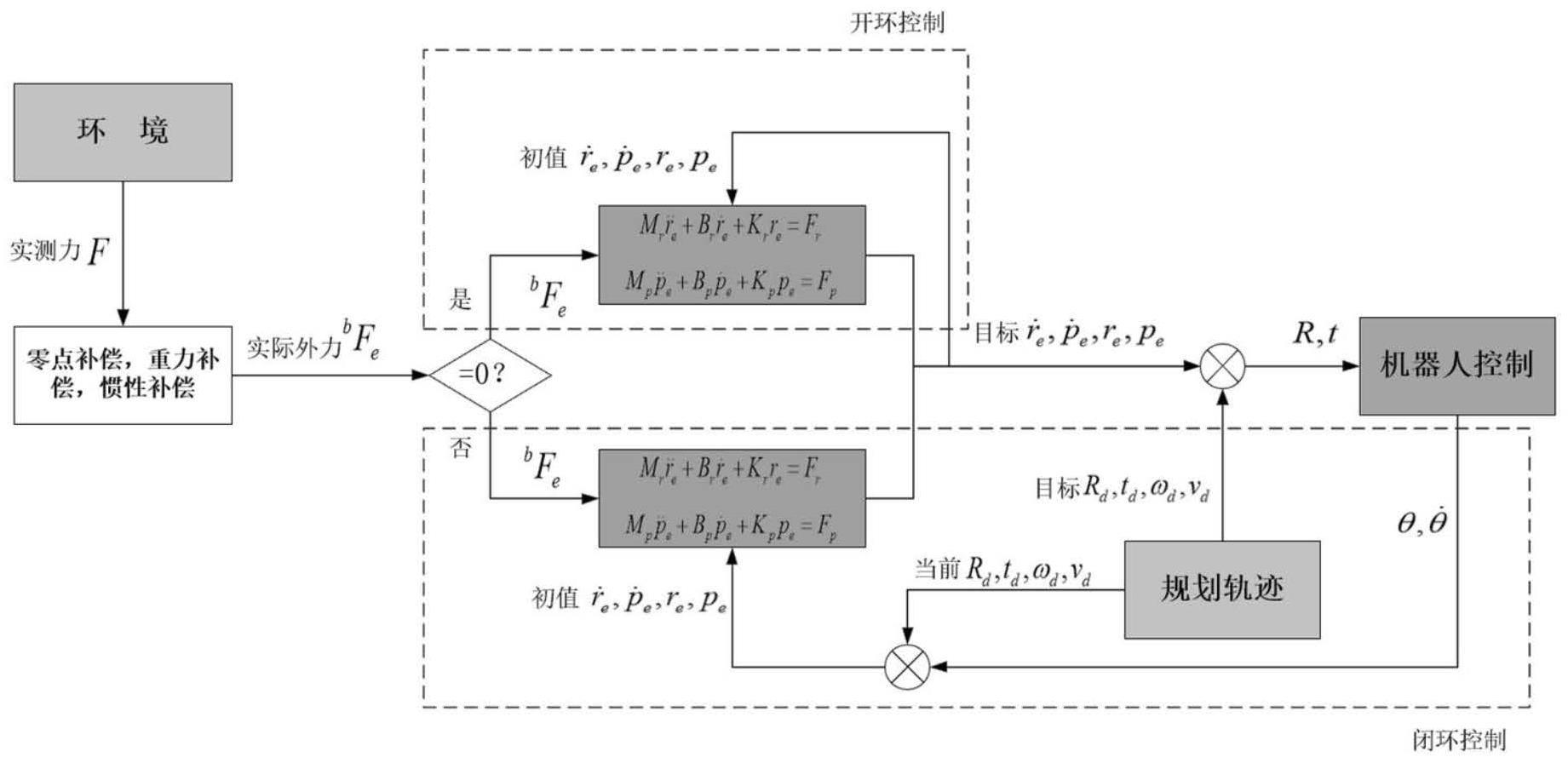
1、本发明首先进行了六自由度导纳控制理论推导,并在此基础上充分对比了开环控制和闭环控制两种方式对实际机器人导纳控制的影响,并提出了一种兼具无接触力时实时跟随性与有接触力时控制稳定性的混合导纳控制方法。无接触力时采用开环控制,即将理论位姿代入控制系统以实现迅速收敛从而达到轨迹跟踪的实时性和准确性;有接触力时采用闭环控制,即以实际测量机器人位姿输入控制系统以实现力接触的稳定性。
2、本发明的有益技术效果包括:
3、1.可实现位置及姿态的六自由度导纳控制;
4、2.混合导纳控制可实现无外力时的实时跟随及有外力时的接触稳定;
5、3.提出的混合导纳控制在有无外力时切换稳定流畅。
技术特征:
1.一种兼具运动精度与稳定性的六自由度混合导纳控制方法,其特征在于,所述方法包括:
2.根据权利要求1所述的兼具运动精度与稳定性的六自由度混合导纳控制方法,其特征在于,所述开环六自由度导纳控制和所述闭环六自由度导纳控制都在六自由度导纳控制系统推导的基础上进行。
3.根据权利要求2所述的兼具运动精度与稳定性的六自由度混合导纳控制方法,其特征在于,所述六自由度导纳控制系统推导包括:
4.根据权利要求3所述的兼具运动精度与稳定性的六自由度混合导纳控制方法,其特征在于,所述开环六自由度导纳控制包括:
5.根据权利要求3所述的兼具运动精度与稳定性的六自由度混合导纳控制方法,其特征在于,所述闭环六自由度导纳控制包括:
技术总结
一种兼具运动精度与稳定性的六自由度混合导纳控制方法,包括:测量机器人与环境的接触力,对力进行零点矫正、重力及惯性补偿后获得实际接触力<supgt;b</supgt;F<subgt;e</subgt;,通过判断|<supgt;b</supgt;F<subgt;e</subgt;|≤10<supgt;‑3</supgt;成立与否判断有无外力输入;当无外力输入,即|<supgt;b</supgt;F<subgt;e</subgt;|≤10<supgt;‑3</supgt;时,采用开环六自由度导纳控制,以上一控制周期计算值作为本周期当前状态;当人机交互存在外力输入,即|<supgt;b</supgt;F<subgt;e</subgt;|>10<supgt;‑3</supgt;时,则采用闭环六自由度导纳控制,以实测关节位置和关节速度计算当前状态进行导纳控制求解。有益技术效果包括:可实现位置及姿态的六自由度导纳控制;可实现无外力时的实时跟随及有外力时的接触稳定;有无外力时切换稳定流畅。
技术研发人员:王君臣,卢春姮,孙振,沈宇
受保护的技术使用者:北京航空航天大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!