一种基于Bi-GRU自编码器的机器人小概率失效预测方法
一种基于bi-gru自编码器的机器人小概率失效预测方法
技术领域
1.本发明涉及机器人小概率失效预测技术领域,尤其涉及一种基于bi-gru自编码器的机器人小概率失效预测方法。
背景技术:
2.协作机器人是指在协作范围内,直接与人交互的一类机器人产品。据统计,全球协作机器人厂商数量超过100家,2018年全球协作机器人销量2.15万台,市场规模38.5亿元,广泛应用于3c、汽车、新零售等领域。协作机器人摆脱护栏束缚,直接与人交互,所以对可靠性要求极为苛刻。但是,面对复杂多变工况,即使采用通过iso 15066安全认证和mtbf5w小时无故障率测试的协作机器人,也无法保证100%无故障。同时,在人机协作时,机器人还存在碰撞反应滞后、碰撞受力不均等问题。导致机器人突发失效,造成生产质量降低、停机宕机、人员伤害等事故。因此预测机器人小概率失效(rave events),具有重要意义。
3.ranjan c提出,当发生率低于5%,即为小概率事件。这类事件不确定性强、耦合因素多、预测困难。目前,对于小概率失效预测研究,主要分为统计方法和机器学习。
4.统计方法,即采用数理统计方法来对设备关键数据信息进行积累、推断、预测,确定出采样样本与总体间的关系。常用方法有状态空间模型、蒙特卡罗法、交叉熵法等。吴祉群等人通过蒙特卡罗法,建立小样本事件的零部件性能参数分布函数,从而估计设备的可靠性。孙慧玲等人通过扩充样本量,并利用bayes bootstrap方法对样本进行参数估计,最后使用蒙特卡罗法进行建模仿真。但蒙特卡罗法可能无解,鉴于此,王亚运利用径向基函数去替代蒙特卡罗法建立的模型,并用交叉熵方法提高模型收敛速度。李宏坤等人选取趋势符合设备状态衰变的相关频带能量,作为设备退化指标。并通过建立退化指标的状态空间预测模型,得到退化指标的概率分布,确定设备的可靠度。以上算法本质上都是基于重要性采样原理,一旦输入变量较多,可能存在模型求解困难的问题。
5.机器学习法,即建立预测网络模型并进行模型训练,提取发生失效的重要特征,从而进行预测。相比统计方法,机器学习可以更好地处理回归分析问题。例如:赵荣珍等人提出基于“主成分分析(pca)+核局部费歇尔判别分析”的子空间降维方法,来对小样本故障数据集分类。苏浩等人提出基于元学习的小样本故障识别方法。其利用卷积神经网络提取小样本信号中的故障特征,并采用元学习方法训练模型参数,最后通过softmax方法分类故障特征。上述方法可辨识出小样本的缺陷,但未考虑时间维度,即未借助之前的信息预测未来可能发生的失效。同时,为捕获小概率失效事件的发生,需要长时间采集引发失效的关键数据。鉴于此,范宇雪等人提出一种基于双向长短时记忆网络(bi-lstm)的小样本故障诊断方法。其通过对含有时间信息的数据进行迭代学习,从而预测设备未来运行状况。chong等人提出基于时序的网络架构,并通过自编码对原始数据进行特征提取,再通过阈值判断未来是否发生异常。基于这一思路,黄宇提出基于lstm自编码器的特征提取与设备故障检测方法。但是上述方法缺乏对输入数据的进行必要处理,加之模型深度较浅,所以难以直接预测小概率失效。在机器人领域,采集传感器数据多达几十种,数据间还存在非线性、强耦合、多
模态的特性,增加了失效特征提取难度。目前,机器人小概率失效预测的研究较少,但需求日益增多,亟需解决。
6.鉴于此,本技术提供基于一种基于bi-gru自编码器的机器人小概率失效预测方法,以解决上述技术问题。
技术实现要素:
7.本发明的目的是为了解决现有技术中存在的缺点,而提出的一种基于bi-gru自编码器的机器人小概率失效预测方法,其预测精度高、泛化能力强,预测机器人小概率失效具有良好的效果。
8.为了实现上述目的,本发明采用了如下技术方案:
9.一种基于bi-gru自编码器的机器人小概率失效预测方法,具体步骤如下:
10.步骤1、采集机器人在不同运行工况下全生命周期数据,通过失效标志前移和归一化处理方式;
11.步骤2、搭建bi-gru自编码器模型,将步骤1得到的数据带入bi-gru自编码器模型中处理;
12.步骤3、结果分析。
13.优选地,在步骤1中,具体方法如下:
14.步骤1.1、采集100台机器人的全生命周期数据,每组数据均包括机器人id号、运行时间cycle、操作设置set1、
…
、操作设置set3、传感器数据p1、
…
、传感器数据p21共27列参数;若某组数据为空或者超过阈值,则直接删除该组数据,共得到20631组数据;
15.步骤1.2、逐一对20631组数据进行失效标记,按机器人id号将这20631组数据分为100类,用每类最大的cycle值依次减去这类数据的cycle值,得到每组数据的剩余寿命data;设定阈值,若data大于阈值,标记这组数据为失效数据,即data为1,否则data标记为0;其中共1100组数据被标记为失效数据,占整个数据集的5.6%;
16.步骤1.3、失效标志前移:若某组数据被标记为失效数据,则删除此组数据,并将它前面的n组数据均标记为失效数据;
17.步骤1.4、将整个数据分为训练集train['id'、'cycle'、'set1'、
…
、'set3'、'p1'、
…
、'p21']、测试集test['id'、'cycle'、'set1'、
…
、'set3'、'p1'、
…
、'p21']、验证集valid['id'、'cycle'、'set1'、
…
、'set3'、'p1'、
…
、'p21'],并分别进行标准化。
[0018]
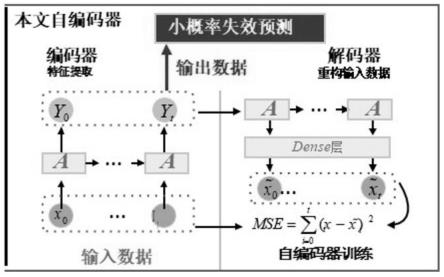
优选地,在步骤2中,将堆叠式bi-gru和自编码器进行组合形成bi-gru自编码器模型,其具体公式如下:
[0019][0020]
其中,xi为输入数据,yi为中间变量,为输出数据,k和j为非线性激活函数;其中,自编码器由编码器和解码器组成。
[0021]
优选地,在步骤2中,首先利用训练集数据train['id'、'cycle'、'set1'、
…
、'set3'、'p1'、
…
、'p21']训练模型;在训练集中,依次以5组数据建立一个矩阵,其对应第6组数据的失效标记,共产生12496个数据对,将这些数据对带入bi-gru自编码器模型,迭代训
练模型参数;在迭代200次后,训练集损失值从0.7414降到0.1316;其次在完成模型训练后,将训练集数据带入模型,即可得到数据对应的失效标记,实现对机器人小概率失效事件的预测。
[0022]
与现有技术相比,本发明具有以下有益效果:
[0023]
1、本发明通过失效标志前移和归一化处理的方式,提高模型对于失效数据的灵敏度;接着将堆叠式bi-gru和自编码器进行组合,充分发挥bi-gru的准确捕获数据动态特性以及自编码器再特征提取方面的优势,提高了预测精度和泛化能力。
[0024]
2、本发明能够同时兼顾预测失效数据和正常数据,可显著提高预测机器人小概率失效事件的准确率。
附图说明
[0025]
图1为本发明中bi-gru自编码器模型的结构示意图;
[0026]
图2为本发明中数据样式与数据处理的状态示意图;
[0027]
图3为本发明中bi-gru自编码器模型的指标定义图;
[0028]
图4为本发明中bi-gru自编码器模型训练时的收敛过程示意图;
[0029]
图5为本发明中bi-gru自编码器模型的预测结果图;
[0030]
图6为本发明中bi-gru自编码器模型预测的错误数据分布示意图。
具体实施方式
[0031]
下面结合附图将对本发明实施例中的技术方案进行清楚、完整地描述,以使本领域的技术人员能够更好的理解本发明的优点和特征,从而对本发明的保护范围做出更为清楚的界定。本发明所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例,基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0032]
参照图1-6,一种基于bi-gru自编码器的机器人小概率失效预测方法,具体步骤如下:
[0033]
步骤1、采集机器人在不同运行工况下全生命周期数据,通过失效标志前移和归一化处理方式,具体方法如下:
[0034]
步骤1.1、采集100台机器人的全生命周期数据,每组数据均包括机器人id号、运行时间cycle、操作设置set1、
…
、操作设置set3、传感器数据p1、
…
、传感器数据p21共27列参数;若某组数据为空或者超过阈值,则直接删除该组数据,共得到20631组数据;
[0035]
步骤1.2、逐一对20631组数据进行失效标记,按机器人id号将这20631组数据分为100类,用每类最大的cycle值(data['max'])依次减去这类数据的cycle值(data['cycle']),得到每组数据的剩余寿命data['rul'];设定阈值,若data['rul']大于阈值,标记这组数据为失效数据,即data['label']为1,否则data['label']标记为0;其中共1100组数据被标记为失效数据,占整个数据集的5.6%,如图2所示;
[0036]
步骤1.3、失效标志前移:若某组数据被标记为失效数据,则删除此组数据,并将它前面的n组数据均标记为失效数据,这里n选2,这种方法可提高模型对失效特征的敏感程度,为提前预测失效做准备;
[0037]
步骤1.4、将整个数据分为训练集train['id'、'cycle'、'set1'、
…
、'set3'、'p1'、
…
、'p21']、测试集test['id'、'cycle'、'set1'、
…
、'set3'、'p1'、
…
、'p21']、验证集valid['id'、'cycle'、'set1'、
…
、'set3'、'p1'、
…
、'p21'],并分别进行标准化。
[0038]
步骤2、搭建bi-gru自编码器模型,将步骤1得到的数据带入bi-gru自编码器模型中处理,具体方法如下:
[0039]
参照图1,将堆叠式bi-gru和自编码器进行组合形成bi-gru自编码器模型,其具体公式如下:
[0040][0041]
其中,xi为输入数据,yi为中间变量,为输出数据,k和j为非线性激活函数;其中,自编码器是一个尽量还原始输入数据的神经网络,其主要由编码器和解码器组成。编码器将输入数据xi转换成中间变量yi。接着,由解码器对yi进行转换,并通过dense层进行特征提取与非线性变化处理得到输出然后,通过自编码器迭代,降低xi和间的均方误差(mse)。当mse满足要求时,无限接近xi。此时中间变量yi已过滤掉xi中不重要信息,仅留下xi的重要特征。通过这种方式,可提高堆叠式bi-gru的学习效率。此时以yi作为预测结果,将显著提升预测准确性。
[0042]
参照图3,同时,设置编码器模型迭代200次,样本的梯度更新设置为128。模型预测精度用混淆矩阵、精确率(ppv)、召回率(tpr)和f-值评判。
[0043]
具体的,首先利用训练集数据train['id'、'cycle'、'set1'、
…
、'set3'、'p1'、
…
、'p21']训练模型;在训练集中,依次以5组数据建立一个矩阵,其对应第6组数据的失效标记,共产生12496个数据对,将这些数据对带入bi-gru自编码器模型,迭代训练模型参数;在迭代200次后,训练集损失值从0.7414降到0.1316;损失值用来表现预测与实际数据的差距程度,因此表明,本实施例模型收敛。
[0044]
在完成模型训练后,将训练集数据带入模型,即可得到数据对应的失效标记(数值均接近0或1),实现对机器人小概率失效事件的预测。但是,将验证集数据带入模型时,得到失效标记确是一系列离散值,这些值均在0和1之间。这是由于本实施例中的模型属于回归模型,所以需要设定阈值,大于阈值的数据被认为是失效数据,反之为正常数据。通过这种方式,将回归模型转为分类模型。如图4所示,给出阈值、ppv、tpr三者之间的关系。由图可知,ppv和tpr随着阈值的变化,呈现非线性关系。本实施例通过两分法选取合理阈值为0.3。现对验证集数据进行配对,共产生3124个数据对,将其带入模型进行训练,最终得到训练后的bi-gru自编码器模型。
[0045]
步骤3、结果分析。
[0046]
这里利用测试集数据来测试模型的预测准确度,测试集共3905组数据,其中实际正常数据共3868组,实际失效数据共37组。图5(b)给出这3905组数据的预测结果,以及它们所属的区域(大于阈值0.3为预测失效区,反之为预测正常区)。图中,红圈为实际失效数据,其基本落在预测失效区内。蓝圈为实际正常数据,也基本落在预测正常区内。从图中也可看出,有些数据未落在规定区域内。这说明有些数据模型预测错误,为定量预测效果,表1给出
预测的关键指标。由表可知,预测效果优异。
[0047]
表1本发明模型的预测关键指标
[0048][0049]
图6给出模型预测的错误数据分布,由图可知,bi-gru自编码器虽然对于失效区的预测错误个数为8个,但是正常区预测错误个数,仅为118个。整体错误率只有3.26%。在实际预测小概率失效事件时,不仅要保证预测失效数据的准确度,也要保证预测正常数据的准确度。实验可知,本发明的方法能够同时兼顾预测失效数据和正常数据,达到良好的预测效果。
[0050]
综上所述,本发明通过失效标志前移和归一化处理的方式,提高模型对于失效数据的灵敏度。同时,采用堆叠式双向gru搭建编码器和解码器,提高预测精度和泛化能力。结果表明,相比标准自编码器方法,本发明可提高f-值约27.02%。相比标准gru自编码方法法,可提高f-值约5.8%。实验验证了本发明方法预测精度高、泛化能力强,预测机器人小概率失效具有良好的效果。
[0051]
本发明中披露的说明和实践,对于本技术领域的普通技术人员来说,都是易于思考和理解的,且在不脱离本发明原理的前提下,还可以做出若干改进和润饰。因此,在不偏离本发明精神的基础上所做的修改或改进,也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1