一种电动尾门控制电路及保护电路的制作方法
1.本技术涉及汽车尾门控制技术领域,尤其涉及一种电动尾门控制电路及保护电路。
背景技术:
2.电动尾门的基本原理是电子控制单元(ecu)从整车电瓶上取电,依据用户控制输入和软件算法,驱动尾门撑杆电机实现尾门的打开、关闭以及速度控制等功能。许多零部件供应商对电动尾门ecu的设计都是通过预驱芯片配合mos,从而实现对撑杆电机的控制,但是预驱芯片的成本高,再加上从2020年开始爆发的全球新冠疫情,使得汽车电子芯片的价格飙升,从而导致采购芯片更加艰难。
3.在实际使用中,当用户手动操作电动尾门时,撑杆电机就是一个发电机,在大力关门的工况下,撑杆电机产生的电压有可能达到60v以上,极易对ecu造成永久性损伤。
4.发明人认为,如果ecu在上电模式下,是可以通过软硬件设计去检测执行器的运转速度并执行保护策略,但是ecu在不上电模式下,现有的设计没有主动式的保护策略,极易损伤ecu。非上电模式下防摔门保护的必要性主要体现在车厂的组装现场,根据经验,没有保护的ecu,组装过程造成损坏的售后概率较高。因此在不上电模式下的,ecu的防摔门保护是一个亟待解决的重点问题。
技术实现要素:
5.为了有助于增强对电动尾门的防摔保护,本技术提供一种电动尾门控制电路及保护电路。
6.一种电动尾门控制电路及保护电路,包括:撑杆电机电路,所述撑杆电机电路用于控制撑杆电机转动,从而带动电动尾门开启或者关闭;pwm控制电路,所述pwm控制电路与所述撑杆电机电路连接;以及mcu控制模块,所述mcu控制模块与所述pwm控制电路连接,以用于控制所述pwm模块控制所述撑杆电机电路,并使的所述撑杆电机正负极短接。
7.通过采用上述技术方案,利用撑杆电机产生的电能来为mcu控制模块的电源输入端供电,从而激活mcu控制模块控制撑杆电机电路,使电机两端同时短接,则此时撑杆电机阻力非常大,人为的掰动后尾门十分困难,从而起到保护作用。
8.可选的,所述撑杆电机电路包括双胞nmos管t1、第二双胞继电器re2、第二二极管d2以及第三二极管d3,所述撑杆电机与所述第二双胞继电器re2连接,所述第二双胞继电器re2分别与所述双胞nmos管t1、所述第二双胞继电器re2、所述第二二极管d2以及所述第三二极管d3连接。
9.可选的,所述双胞nmos管t1包括nmos管t1-1和nmos管t1-2,所述第二双胞继电器re2包括继电器re2-1和继电器re2-2;所述撑杆电机的正极与所述继电器re2-1的3脚连接,
所述撑杆电机的负极与所述继电器re2-2的3脚连接,所述继电器re2-1的1脚分别与所述第二二极管d2的2脚以及所述nmos管t1-1的漏极连接,所述继电器re2-2的1脚分别与所述第三二极管d3的2脚以及所述nmos管t1-2的漏极连接,所述nmos管t1-1的栅极以及所述nmos管t1-2的栅极均与所述pwm控制电路连接,所述nmos管t1-1的源极与所述nmos管t1-2的源极均与采样电阻r1的1脚连接。
10.可选的,电动尾门控制电路及保护电路还包括第一单胞继电器re1,所述单胞继电器re1的3脚与电机电源连接,所述单胞继电器re1的2脚与第四二极管d4的2脚连接,所述单胞继电器re1的2脚分别与所述第二二极管d2的1脚、所述第三二极管d3的1脚、所述继电器re2-1的1脚以及所述继电器re2-2的1脚连接。
11.可选的,电动尾门控制电路及保护电路还包括第二电机电源采集电路,所述第二电机电源采集电路与所述第一单胞继电器re1的2脚、所述第四二极管d4的2脚、所述第二二极管d2的1脚、所述第三二极管d3的1脚、所述继电器re2-1的2脚连接、所述继电器re2-2的2脚连接以及所述mcu控制模块连接,所述第二电机电源采集电路用于检测用户手动操作电动尾门产生的异常电压。
12.可选的,电动尾门控制电路及保护电路还包括系统电源检测电路,所述系统电源检测电路分别与系统电源以及所述mcu控制模块连接,所述系统电源检测电路用于判断ecu的供电是否正常。
13.可选的,电动尾门电路还包括第一电机电源采集电路,所述第一电机电源采集电路分别与电机电源以及所述mcu控制模块连接,所述第一电机采集电路用于判断ecu的供电是否正常。
14.可选的,电动尾门电路还包括ldo电源控制模块,所述ldo电源控制模块分别与第一二极管d1的1脚、第二限流电阻r2的2脚以及所述mcu控制模块连接,所述ldo电源控制模块用于稳定电压,以保护所述mcu控制模块正常工作。
15.可选的,电动尾门控制电路及保护电路还包括运算放大器电路,所述运算放大器电路分别与所述mcu控制模块以及第一采样电阻r1的1脚连接,所述运算放大电流用于检测撑杆电机工作时的电流大小。
16.综上所述,本技术包括以下有益技术效果:利用撑杆电机产生的电能来为mcu控制模块的电源输入端供电,从而激活mcu控制模块控制撑杆电机电路,使电机两端同时短接,则此时撑杆电机阻力非常大,人为的掰动后尾门十分困难,从而起到保护作用。
附图说明
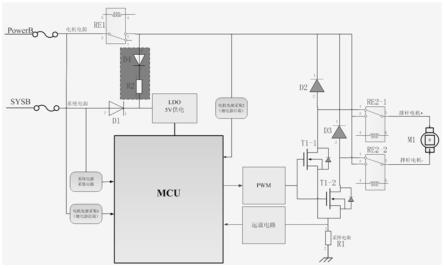
17.图1是本技术实施例1一种电动尾门控制电路及保护电路的电路模块示意图;图2是本技术实施例一种电动尾门控制电路及保护电路中撑杆电机正转电路模块示意图;图3是本技术实施例一种电动尾门控制电路及保护电路中撑杆电机反转电路模块示意图;图4是本技术实施例2一种电动尾门控制电路及保护电路的电路模块示意图。
18.附图标记说明:1、撑杆电机电路模块;2、pwm控制电路;3、mcu控制模块;4、第一单胞继电器re1;5、
第二电机电源采集电路;6、系统电源检测电路;7、第一电机电源采集电路;8、ldo电源控制模块;9、运算放大器电路。
具体实施方式
19.ldo即low dropout regulator,是一种低压差线性稳压器,使用在其饱和区域内运行的晶体管或场效应管(fet),从应用的输入电压中减去超额的电压,产生经过调节的输出电压。
20.nmos英文全称为n-metal-oxide-semiconductor意思为n型金属-氧化物-半导体,而拥有这种结构的晶体管我们称之为nmos晶体管。mos晶体管有p型mos管和n型mos管之分。由mos管构成的集成电路称为mos集成电路,由nmos组成的电路就是nmos集成电路,由pmos管组成的电路就是pmos集成电路,由nmos和pmos两种管子组成的互补mos电路,即cmos电路。
21.脉冲宽度调制(pwm)是利用微处理器的数字输出来对模拟电路进行控制的一种非常有效的技术,广泛应用在从测量、通信到功率控制与变换的许多领域中。脉冲宽度调制是一种模拟控制方式,其根据相应载荷的变化来调制晶体管基极或mos管栅极的偏置,来实现晶体管或mos管导通时间的改变,从而实现开关稳压电源输出的改变。这种方式能使电源的输出电压在工作条件变化时保持恒定,是利用微处理器的数字信号对模拟电路进行控制的一种非常有效的技术。
22.微控制单元(microcontroller unit;mcu) ,又称单片微型计算机(single chip microcomputer )或者单片机,是把中央处理器(central process unit;cpu)的频率与规格做适当缩减,并将内存(memory)、计数器(timer)、usb、a/d转换、uart、plc、dma等周边接口,甚至lcd驱动电路都整合在单一芯片上,形成芯片级的计算机,为不同的应用场合做不同组合控制。
23.实施例1本技术公开了一种电动尾门控制电路及保护电路。
24.参照图1,一种电动尾门控制电路及保护电路,包括撑杆电机电路、第一单胞继电器re14、第一电机电源采集电路7、第二电机电源采集电路5、系统电源检测电路6、ldo电源控制模块8以及运算放大器电路9等。
25.撑杆电机电路包括撑杆电机、双胞nmos管t1、第二双胞继电器re2、第二二极管d2以及第三二极管d3,其中,双胞nmos管t1包括nmos管t1-1和nmos管t1-2,第二双胞继电器re2包括继电器re2-1和继电器re2-2,撑杆电机电路用于控制撑杆电机转动,从而带动电动尾门开启或者关闭。
26.撑杆电机的正极与继电器re2-1的3脚串联,撑杆电机的负极与继电器re2-2的3脚串联,继电器re2-1的1脚与第二二极管d2的2脚串联,继电器re2-1与nmos管t1-1的漏极并联,继电器re2-2的1脚与第三二极管d3的2脚串联,继电器re2-2的1脚与nmos管t1-2的漏极并联,nmos管t1-1的栅极以及nmos管t1-2的栅极均与pwm控制电路2串联,nmos管t1-1的源极与nmos管t1-2的源极均与采样电阻r1的1脚串联,第二二极管d2的1脚与第三二极管d3的1脚并联后再分别与第一单胞继电器re14的2脚以及第四二极管d4的2脚串联。
27.具体的,本实施例中,当用户手动操作电动后尾门,电动后尾门在机械力的作用下
使撑杆电机产生电能。用户手动开门时,撑杆电机正转,用户手动关门时,撑杆电机反转;或者,用户手动开门时,撑杆电机反转,用户手动关门时,撑杆电机正转。而撑杆电机正转与反转情况下,分别产生正电压和负电压。本实施例中第二二极管d2以及第三二极管d3还具有整流功能,使得无论撑杆电机正转还是反转,第二二极管d2的1脚以及第三二极管d3的1脚为正电压。
28.当电动尾门正常开启或者关闭时,撑杆电机正常工作,此时pwm控制电路2控制nmos管t1-1或t1-2调速,第二二极管d2和第三二极管d3起到续流的作用,因此第二二极管d2和第三二极管d3也为电路中的续流二极管。当nmost1-1调速时,第二二极管d2起续流作用,当nmost1-2调速时,第三二极管d3起续流作用。
29.第四二极管d4的1脚与第二限流电阻r2的1脚串联,第二限流电阻r2的2脚与ldo电源控制模块8串联,ldo电源控制模块8与mcu控制模块3连接。
30.由于掰门导致撑杆电机产生的自发电的电压是一个瞬间上升的过程,ldo电源控制模块8将掰门导致自发电稳定在特定的电压范围内,防止急速上升的电压直接输入至mcu控制模块3的电源输入端,保护mcu控制模块3以及电动尾门控制电路及保护电路的正常工作。
31.mcu控制模块3与pwm控制电路2串联,pwm控制电路2分别与nmos管t1-1的栅极以及nmos管t1-2的栅极串联。
32.第一单胞继电器re14的3脚与电机电源串联,电机电源还与第一电机电源采集电路7,第一电机电源采集电路7与mcu控制模块3串联。
33.系统电源分别与第一二极管d1的2脚以及系统电源检测电路6串联,第一二极管d1的1脚与第二限流电阻r2的2脚并联后,再与ldo电源控制模块8串联;系统电源检测电路6与mcu控制模块3串联。
34.具体的,本实施例中,mcu控制模块3在每次上电始化完成之后,通过检测系统电源检测电路6和第一电机电源采集电路7来判断ecu的供电是否正常,只有在正常的电压下才能开启或者关闭电动尾门,从而保护电动尾门ecu。
35.具体的,在本实施例中,在检测第二电机电源检测电路的电压时,mcu控制单元控制第一单胞继电器re14的2脚和3脚断开,则撑杆电机产生的电能在第一单胞继电器re14的2脚处截止,无法通过第一单胞继电器re14传输电机电源供电端powerb,有助于避免撑杆电机产生电能对功率供电端powerb的电压造成影响,从而有助于避免误检测。进一步地,mcu控制模块3正常上电工作时,可以控制第一单胞继电器re14吸合,即re1的2脚和3脚连接,使检测功率供电端pv1为执行器电机m供电。
36.第二电机电源采集电路5分别被第一单胞继电器re14的2脚、第四二极管d4的2脚、第二二极管d2的1脚、第三二极管d3的1脚、继电器re2-1的2脚、继电器re2-2的2脚串联后,再与mcu控制模块3串联。
37.具体的,本实施例中,第二电机电源采集电路5可采集到用户手动操作电动尾门产生的异常电压,可根据采集到的异常电压来采取对应的措施。例如,当用户手动操作电动尾门产生的电压低于30v时,可认为对ecu系统不具备破坏能力,此时不需要采取保护措施;当用户手动操作电动尾门产生的电压高于30v时,可认为对ecu系统具备破坏能力,此时就需要采取保护措施,而保护电动尾门ecu。
38.运算放大器电路9分别与nmos管t1-1的源极、nmos管t1-2的源极以及采样电阻r1的1脚连接。
39.具体的,本实施例中,运算放大器电路9可检测到撑杆电机工作时的电流,当检测到撑杆电机工作电流异常时,可通过mcu控制模块3控制第一单胞继电器re14关断电机电源或者停止驱动撑杆电机,从而保护ecu模块和撑杆电机。
40.撑杆电机电路用于控制撑杆电机正反转动,从而带动电动尾门开启或者关闭。
41.参照图2,mcu模块控制第一单胞继电器re14吸合,则第一单胞继电器re14内部的2脚和3脚相连,为驱动撑杆电机提供电源;mcu控制模块3控制继电器re2-1吸合,则继电器re2-1内部的2脚和3脚相连,此时继电器re2-1的3脚与撑杆电机电源电压相同;mcu控制模块3控制pwm控制电路2来驱动nmos管t1-2;此时驱动撑杆电机正向转动;撑杆电机正向转动时的电流走势为从继电器re2-1流向撑杆电机正极,再经过撑杆电机负极后流向继电器re2-2。
42.参照他3,mcu模块控制第一单胞继电器re14吸合,则第一单胞继电器re14内部的2脚和3脚相连,为驱动撑杆电机提供电源;mcu控制模块3控制继电器re2-2吸合,则继电器re2-2内部的2脚和3脚相连,此时继电器re2-2的3脚与撑杆电机电源电压相同;mcu控制模块3控制pwm控制电路2来驱动nmos管t1-1;此时驱动撑杆电机反向转动;撑杆电机反向转动时的电流走势为从继电器re2-2流向撑杆电机负极,再经过撑杆电机正极后流向继电器re2-1。
43.此外,值得说明的是,本技术实施例中,继电器的控制均是通过mcu控制模块3来控制继电器驱动电路从而控制继电器的吸合和断开。
44.本技术实施例一种电动尾门控制电路及保护电路的实施原理为:当用户手动操作电动后尾门,电动后尾门在机械力的作用下使撑杆电机m产生电能,此时,撑杆电机m相当于发电机,撑杆电机的正极和继电器re2-1的3脚连接,继电器re2-1的1脚和3脚内部连接,继电器re2-1的3脚和第二二极管d2的2脚连接,第二二极管d2的1脚和第一单胞继电器re14的2脚连接;此时撑杆电机的正极的电压和第一单胞继电器re14的2脚的电压几乎一致。将撑杆电机正极的电压通过第四二极管d4和第二限流电阻r2为ldo控制模块供电,从而为mcu控制模块3供电,mcu控制模块3通过控制pwm控制电路2来控制nmos管t1-1和nmos管t1-2打开,则相当于将撑杆电机两端同时短接,此时电机阻力相当大,可阻断用户暴力摔门的行为,避免用户手动操作电动后尾门产生的电压对电动尾门控制电路及保护电路造成伤害,从而提供一种在非上电模式下的主动式防摔门保护。
45.实施例2参照图4,本实施例与实施例1存在的不同之处在于将图1至图3中的双胞nmos管t1换成一个nmos管t3,并且去掉第三二极管d3。
46.nmos管t3的栅极和pwm控制电路2连接,nmos管t3的漏极和继电器re2-1的1脚连接,t3的漏极和继电器re2-2的1脚连接,t3的源极和第一采样电阻r1的1脚连接。此种控制电路同样可以控制撑杆电机的正反转,但是该电路在常态下,撑杆电机的正极和继电器re2-1的3脚相连,继电器re2-1的1脚和3脚内部相连,继电器re2-1的1脚和nmos管t3的漏极相连;撑杆电机的负极和继电器re2-2的3脚相连,继电器re2-2的1脚和3脚内部相连,继电器re2-2的1脚和nmos管t3的漏极相连;则撑杆电机的正极和负极是短接状态,此时电机阻
力很大,此种状态下后尾门无法手动操作,手动操作功能失效。因此本实施例适用于驱动电动尾门的尾门锁电机、吸合电机等无法人为操作的电机,而实施例1适用于驱动尾门撑杆电机。
47.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1