一种腕关节偏置型机器人校零装置及方法与流程
1.本发明属于机器人领域,具体地说是一种腕关节偏置型机器人校零装置及方法。
背景技术:
2.近二十年来,机器人技术发展非常迅速,各种用途的机器人在各个领域获得广泛的应用,尤其六轴工业机器人被广泛应用于汽车工业、塑料工业、药品工业及食品工业等领域,用来完成打磨、搬运、喷涂、焊接等操作,以代替人工操作,解放生产力,提高生产效率。一般的六轴工业机器人应用方式,即在腕部末端加装操作工具,通过操控机器人实现生产过程中的柔性自动化。
3.腕关节是衔接手臂和末端执行器的机器人部件,处于机器人的末端,其功能是在手臂和腰部实现末端执行器在作业空间的三个坐标位置的基础上,再由腕部来实现末端执行器在作业空间的三个姿态。现行工业机器人腕关节受限于机械结构,只能在-125度和+125度范围内摆动,大大受限,这样就使操作过程中,运动轨迹及连续性会有一定影响,进而影响整个机械手臂的运动姿态。因此,腕关节偏置型机器人实现机器人末端四轴、五轴和六轴的无限回转。提升应用范围,例如打磨、喷涂等工况。
4.然而,由于机器人的腕关节偏置,现有通过插校零销进行腕关节校零的方式,会由于腕关节偏置尺寸过大,导致精度过低。因此需要一种新的腕关节偏置型机器人校零装置及方法。
技术实现要素:
5.针对上述问题,本发明的目的在于提供一种腕关节偏置型机器人校零装置及方法。
6.本发明的目的是通过以下技术方案来实现的:
7.一种腕关节偏置型机器人校零装置,包括基板、校零挡轴及转板,所述校零挡轴分为连接在一起的插接柱部及基准挡块部,所述插接柱部与待测机器人的机器人小臂上对应开设的基准孔插接,所述基板分为连接在一起的基准测试a部及基准测试b部,所述基准测试a部嵌入至待测机器人的机器人手腕上对应开设的基板安装槽中固定,所述转板分为连接在一起的转板主体部及延伸测试端部,所述转板主体部安装于待测机器人的机器人末端执行器连接法兰上;
8.所述基准挡块部的外周设有定位侧面a,所述基准测试b部上设有用于与所述定位侧面a贴合以进行校零的定位侧面b,所述延伸测试端部的外周设有定位侧面c,所述基准测试a部上设有若干个定位侧面d,其中一个所述定位侧面d与所述定位侧面c贴合以进行校零,所述定位侧面d所在的平面与所述定位侧面b所在的平面相平行。
9.所述基准孔的轴线中心线与待测机器人的第五轴轴线平行、且与待测机器人的第六轴轴线正交,所述基准孔外周的所述机器人小臂上设有基准平面a,所述基准平面a所在的平面与待测机器人的第五轴轴线正交;
10.所述校零挡轴的插接柱部的外周面为插接柱面,所述插接柱面与所述基准孔间隙配合,所述插接柱部与所述基准挡块部的底面连接,所述插接柱部外侧的所述基准挡块部的底面形成基准底面a;所述插接柱面与所述基准孔插接后、所述基准底面a与所述基准平面a相贴合。
11.所述基准孔的开口边缘设有倒角a;所述插接柱部的底端外周边缘设有倒角b。
12.所述校零挡轴的基准挡块部的顶面作为螺钉连接面,所述螺钉连接面上开设有螺纹孔a,所述螺纹孔a螺纹连接有拆卸螺钉。
13.所述校零挡轴的基准挡块部的外周侧面分为两个相对设置的定位侧面a及两个相对设置的大凸圆弧面,每个所述大凸圆弧面与相邻的所述定位侧面a之间通过导向圆角a连接。
14.所述基板安装槽的底面为基准底面b,所述基准底面b所在的平面与待测机器人的第五轴轴线正交,所述基准底面b上开设有若干螺纹孔b,所述基板安装槽具有两个相对的侧面作为基准侧面a,两个所述基准侧面a均与待测机器人的第五轴轴线平行;
15.所述基板的基准测试a部上分别设有一个基准平面b及两个定位侧面d,所述基板的基准测试a部上还穿设有若干个分别与各所述螺纹孔b连接的连接螺钉a,所述基准平面b与所述基准底面b贴合,每个所述定位侧面d分别与对应的一个所述基准侧面a贴合。
16.所述基板安装槽开口处的基准侧面a设有倒角c,所述基准平面b分别与相邻的所述定位侧面d之间通过导向圆角b连接。
17.所述机器人末端执行器连接法兰的端面作为基准平面c,所述基准平面c所在的平面与待测机器人的第六轴轴线正交,所述基准平面c上开设有若干螺纹孔c;
18.所述转板的转板主体部的一端面作为基准底面c,所述基准底面c与所述基准平面c贴合,所述转板的转板主体部上还穿设有若干个分别与各所述螺纹孔c连接的连接螺钉b。
19.所述基准平面c上开设有若干销孔,所述转板的转板主体部上还穿设有若干个分别与各所述销孔连接的定位销钉。
20.一种腕关节偏置型机器人校零方法,采用前述的腕关节偏置型机器人校零装置实施,该校零方法包括以下步骤:
21.步骤一.将待测机器人连接机器人示教器,转动机器人小臂和机器人手腕之间的第五轴,让机器人手腕远离机器人小臂,留出基板安装在机器人手腕上的操作空间;
22.步骤二.将基板安装在机器人手腕上,通过导向圆角b和倒角c进行导引,将基准平面b贴合基准底面b,定位侧面d贴合基准侧面a,使连接螺钉a进入螺纹孔b,定位侧面d和定位侧面b均表征机器人手腕的空间位置和姿态;
23.步骤三.将校零挡轴安装在机器人小臂上,通过倒角b与倒角a进行导引,插接柱面插入基准孔,基准底面a和基准平面a贴合;
24.步骤四.机器人小臂和机器人手腕校零,转动机器人小臂和机器人手腕之间的第五轴,让基板的定位侧面b与导向圆角a抵触,并使校零挡轴转动;
25.步骤五.不断通过塞尺测量定位侧面b与定位侧面a之间的间隙,并通过机器人示教器给出转动机器人小臂和机器人手腕之间的第五轴的转动输入值,从高速、中速、低速和微动依次进行调整,使转动机器人小臂和机器人手腕发生相对转动,至定位侧面b与定位侧面a完全贴合;
26.步骤六.通过透光率仪进行光学复检,使透光率仪的光线从定位侧面b与定位侧面a之间缝隙的一侧照入,复检该缝隙另外一侧的透光率;不透光为合格,并进行下一步骤;不合格则回到步骤二重新操作调整,直至合格,之后继续进行下一步骤;
27.步骤七.操作机器人示教器,记录机器人小臂和机器人手腕的第五轴的零位;
28.步骤八.调整机器人手腕和机器人末端执行器连接法兰转动的轴线,即待测机器人的第六轴的相位,使转板与基板安装后不干涉;
29.步骤九.将转板安装于机器人末端执行器连接法兰上,使基准底面c与基准平面c贴合,使定位销钉穿入销孔锁定位置和姿态,使连接螺钉b与螺纹孔c连接;
30.步骤十.机器人手腕和机器人末端执行器连接法兰校零,转动待测机器人的第六轴,让转板的定位侧面c与基板的定位侧面d抵触;
31.步骤十一.不断通过塞尺测量定位侧面c与定位侧面d之间的间隙,并通过机器人示教器给出机器人手腕和机器人末端执行器连接法兰的第六轴转动输入值,从高速、中速、低速和微动依次进行调整,使机器人手腕和机器人末端执行器连接法兰发生相对转动,至定位侧面c与定位侧面d完全贴合;
32.步骤十二.通过透光率仪进行光学复检,使透光率仪的光线从定位侧面c与定位侧面d之间缝隙的一侧照入,复检该缝隙另外一侧的透光率;不透光为合格,并进行下一步骤;不合格则回到步骤九重新操作调整,直至合格,之后继续进行下一步骤;
33.步骤十三.操作机器人示教器,机器人手腕和机器人末端执行器连接法兰的第六轴零位;
34.步骤十四.校零结束,拆除基板、校零挡轴和转板。
35.本发明的优点与积极效果为:
36.本发明通过精密加工而成的基板、校零挡轴及转板与待测机器人的机器人小臂、机器人手腕及机器人末端执行器连接法兰之间的配合设置,不受腕关节偏置尺寸过大的影响,相对于现有机器人通用插销结构校零方法,可以获得较高的标定精度,且标定精度与校零装置加工精度有关,与操作者的操作经验关系较小,便于人机工程学操作,使用简单,制造保养方便。
附图说明
37.图1为本发明的整体的设置结构示意图;
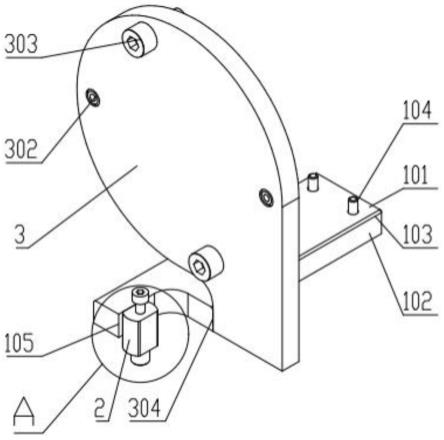
38.图2为图1的a处放大图;
39.图3为本发明的转板与基板设置结构示意图;
40.图4为本发明所适用的腕关节偏置型机器人的局部的立体结构示意图;
41.图5为本发明所适用的腕关节偏置型机器人的局部的主视结构示意图;
42.图6为本发明所适用的腕关节偏置型机器人的部分机械连接接口的结构示意图;
43.图7为本发明使用状态时的立体结构示意图。
44.图中:1为基板、101为基准平面b、102为定位侧面d、103为导向圆角b、104为连接螺钉a、105为定位侧面b;
45.2为校零挡轴、201为倒角b、202为插接柱面、203为基准底面a、204为大凸圆弧面、205为导向圆角a、206为定位侧面a、207为螺钉连接面、208为拆卸螺钉;
46.3为转板、301为基准底面c、302为定位销钉、303为连接螺钉b、304为定位侧面c;
47.4为机器人小臂、401为基准孔、402为基准平面a、403为倒角a;
48.5为机器人手腕、501为基准底面b、502为基准侧面a、503为倒角c、504为螺纹孔b;
49.6为机器人末端执行器连接法兰、601为基准平面c、602为销孔、603为螺纹孔c;
50.7为第五轴轴线、8为第六轴轴线。
具体实施方式
51.下面结合附图1-7对本发明作进一步详述。
52.一种腕关节偏置型机器人校零装置,如图1-7所示,本实施例中包括通过精密加工而成的基板1、校零挡轴2及转板3,校零挡轴2分为连接在一起的插接柱部及基准挡块部,插接柱部与待测机器人的机器人小臂4上对应开设的基准孔401插接,基板1为长条板状、分为连接在一起的基准测试a部及基准测试b部,基准测试a部嵌入至待测机器人的机器人手腕5上对应开设的基板安装槽中固定,转板3分为连接在一起的转板主体部及延伸测试端部,转板主体部为圆板状,延伸测试端部为凸出圆板状的转板主体部的部分,转板主体部安装于待测机器人的机器人末端执行器连接法兰6上。
53.基准挡块部的外周设有定位侧面a 206,基准测试b部上设有用于与定位侧面a 206贴合以进行校零的定位侧面b 105,延伸测试端部的外周设有定位侧面c 304,基准测试a部上两个定位侧面d 102,其中一个定位侧面d 102与定位侧面c 304贴合以进行校零,各定位侧面d 102所在的平面均与定位侧面b 105所在的平面相平行。定位侧面a 206、定位侧面b 105、定位侧面c 304及定位侧面d 102均为精密加工而成的配合平面。
54.具体而言,本实施例中基准孔401的轴线中心线与待测机器人的第五轴轴线7平行、且与待测机器人的第六轴轴线8正交,基准孔401外周的机器人小臂4上设有基准平面a 402,基准平面a 402所在的平面与待测机器人的第五轴轴线7正交。基准平面a 402为精密加工而成的配合平面。
55.校零挡轴2的插接柱部的外周面为插接柱面202,插接柱面202与基准孔401间隙配合,插接柱部与基准挡块部的底面连接,插接柱部外侧的基准挡块部的底面形成基准底面a 203;插接柱面202与基准孔401插接后、基准底面a 203与基准平面a 402相贴合。基准孔401的开口边缘设有倒角a 403;插接柱部的底端外周边缘设有倒角b 201。
56.校零挡轴2的基准挡块部的外周侧面分为两个相对设置的定位侧面a 206及两个相对设置的大凸圆弧面204,每个大凸圆弧面604与相邻的定位侧面a 206之间通过导向圆角a 205连接。校零时,其中一个定位侧面a 206与定位侧面b 105贴合。
57.校零挡轴2的基准挡块部的顶面作为螺钉连接面207,螺钉连接面207上开设有螺纹孔a,螺纹孔a螺纹连接有拆卸螺钉208。拆卸螺钉208的设置,方便通过钳子夹持拆卸螺钉208,并将校零挡轴2取下,以防止损伤校零挡轴2的定位侧面a 206。
58.具体而言,本实施例中基板安装槽的底面为基准底面b 501,基准底面b 501所在的平面与待测机器人的第五轴轴线7正交,基准底面b 501上开设有若干螺纹孔b 504,基板安装槽具有两个相对的侧面作为基准侧面a 502,两个基准侧面a 502均与待测机器人的第五轴轴线7平行。基准底面b 501为精密加工而成的配合平面。
59.基板1的基准测试a部上分别设有一个基准平面b 101及两个定位侧面d 102,基板
1的基准测试a部上还穿设有若干个分别与各螺纹孔b 504连接的连接螺钉a 104,基准平面b 101与基准底面b 501贴合,每个定位侧面d 102分别与对应的一个基准侧面a 502贴合。基板安装槽开口处的基准侧面a 502设有倒角c 503,基准平面b 101分别与相邻的定位侧面d 102之间通过导向圆角b 103连接。
60.具体而言,本实施例中机器人末端执行器连接法兰6的端面作为基准平面c 601,基准平面c 601所在的平面与待测机器人的第六轴轴线8正交,基准平面c 601上开设有若干螺纹孔c 603。基准平面c 601为精密加工而成的配合平面。
61.转板3的转板主体部的一端面作为基准底面c 301,基准底面c 301与基准平面c 601贴合,转板3的转板主体部上还穿设有若干个分别与各螺纹孔c 603连接的连接螺钉b 303。基准平面c 601上开设有若干销孔602,转板3的转板主体部上还穿设有若干个分别与各销孔602连接的定位销钉302。
62.一种腕关节偏置型机器人校零方法,采用上述的腕关节偏置型机器人校零装置实施,该校零方法包括以下步骤:
63.步骤一.将待测机器人连接机器人示教器,转动机器人小臂4和机器人手腕5之间的第五轴,让机器人手腕5远离机器人小臂4,留出基板1安装在机器人手腕5上的操作空间;
64.步骤二.将基板1安装在机器人手腕5上,通过导向圆角b 103和倒角c 503进行导引,将基准平面b 101贴合基准底面b 501,定位侧面d 102贴合基准侧面a 502,使连接螺钉a 104进入螺纹孔b 504,定位侧面d 102和定位侧面b 105均表征机器人手腕5的空间位置和姿态;
65.步骤三.将校零挡轴2安装在机器人小臂4上,通过倒角b 201与倒角a 403进行导引,插接柱面202插入基准孔401,基准底面a 203和基准平面a 402贴合;
66.步骤四.机器人小臂4和机器人手腕5校零,转动机器人小臂4和机器人手腕5之间的第五轴,让基板1的定位侧面b 105与导向圆角a 205抵触,并使校零挡轴2转动;
67.步骤五.不断通过塞尺测量定位侧面b 105与定位侧面a 206之间的间隙,并通过机器人示教器给出转动机器人小臂4和机器人手腕5之间的第五轴的转动输入值,从高速、中速、低速和微动依次进行调整,使转动机器人小臂4和机器人手腕5发生相对转动,至定位侧面b 105与定位侧面a 206完全贴合;
68.步骤六.通过透光率仪进行光学复检,使透光率仪的光线从定位侧面b 105与定位侧面a 206之间缝隙的一侧照入,复检该缝隙另外一侧的透光率;不透光为合格,并进行下一步骤;不合格则回到步骤二重新操作调整,直至合格,之后继续进行下一步骤;
69.步骤七.操作机器人示教器,记录机器人小臂4和机器人手腕5的第五轴的零位;
70.步骤八.调整机器人手腕5和机器人末端执行器连接法兰6转动的轴线,即待测机器人的第六轴的相位,使转板3与基板1安装后不干涉;
71.步骤九.将转板3安装于机器人末端执行器连接法兰6上,使基准底面c 301与基准平面c 601贴合,使定位销钉302穿入销孔602锁定位置和姿态,使连接螺钉b 303与螺纹孔c 603连接;
72.步骤十.机器人手腕5和机器人末端执行器连接法兰6校零,转动待测机器人的第六轴,让转板3的定位侧面c 304与基板1的定位侧面d 102抵触;
73.步骤十一.不断通过塞尺测量定位侧面c 304与定位侧面d 102之间的间隙,并通
过机器人示教器给出机器人手腕5和机器人末端执行器连接法兰6的第六轴转动输入值,从高速、中速、低速和微动依次进行调整,使机器人手腕5和机器人末端执行器连接法兰6发生相对转动,至定位侧面c 304与定位侧面d 102完全贴合;
74.步骤十二.通过透光率仪进行光学复检,使透光率仪的光线从定位侧面c 304与定位侧面d 102之间缝隙的一侧照入,复检该缝隙另外一侧的透光率;不透光为合格,并进行下一步骤;不合格则回到步骤九重新操作调整,直至合格,之后继续进行下一步骤;
75.步骤十三.操作机器人示教器,机器人手腕5和机器人末端执行器连接法兰6的第六轴零位;
76.步骤十四.校零结束,拆除基板1、校零挡轴2和转板3。
77.工作原理:
78.通过精密加工而成的基板1、校零挡轴2及转板3与待测机器人的机器人小臂4、机器人手腕5及机器人末端执行器连接法兰6之间的配合设置,不受腕关节偏置尺寸过大的影响,相对于现有机器人通用插销结构校零方法,可以获得较高的标定精度,且标定精度与校零装置加工精度有关,与操作者的操作经验关系较小,便于人机工程学操作,使用简单,制造保养方便。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1