一种高效的时间最优轨迹在线生成方法与流程
1.本发明涉及工业机器人技术领域,特别涉及一种高效的时间最优轨迹在线生成方法。
背景技术:
2.经过几十年的发展,机器人已经渗透了人们生产生活中的各个部分,特别是工业机械臂,开始大规模取代工厂中重复性工作。尽管机械臂轨迹规划技术日趋完善,大量时间最优轨迹规划技术如基于动态规划法、变结构滤波器法、凸规划法等被相继提出,然而一方面,大部分技术主要针对离线轨迹规划,即使是在线规划也面临计算量较大的问题,很难直接应用到工业机械臂上:机械臂在运行过程中一旦发生意外或者人为要求需要机械臂立刻停止,离线规划只能采用电机下电抱闸的方式停止,这样会对机械臂本体产生不可逆转的损坏,减少其使用寿命。而一般工业机械臂出于成本的考虑,控制系统算力有限,计算量过大的在线轨迹规划会减小控制系统带宽,影响机械臂性能。另一方面,机械臂驱动器的实际驱动能力有物理约束,而机械臂是一个复杂的多自由度非线性系统,传统的“t型”、“s型”轨迹规划很难处理时变约束,难以使电机时刻工作在最佳性能上,充分发挥电机的实际性能,更难生成时间最优轨迹。
3.现有的机械臂在运行中面临着控制系统算力有限,实际环境复杂需要可靠安全的急停,因此在线轨迹生成是机器人系统不可或缺的一项技术。
技术实现要素:
4.本发明的目的旨在至少解决所述技术缺陷之一。
5.为此,本发明的目的在于提出一种高效的时间最优轨迹在线生成方法。
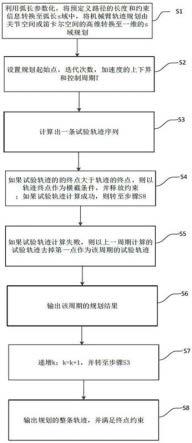
6.为了实现上述目的,本发明的实施例提供一种高效的时间最优轨迹在线生成方法,包括如下步骤:步骤s1,利用弧长参数化,将预定义路径的长度和约束信息转换至弧长s域中,将机械臂轨迹规划由关节空间或笛卡尔空间的高维转换至一维的s域规划;步骤s2,设置规划起始点,迭代次数k=0,加速度u的上下界,控制周期t;步骤s3,计算出一条试验轨迹序列;其中,该轨迹的初始条件是轨迹的当前状态,横截条件是,并令;步骤s4,如果试验轨迹的终点大于轨迹的终点,则以轨迹终点作为横截条件,并释放约束 ;如果试验轨迹计算成功,则转至步骤s8;
步骤s5,如果试验轨迹计算失败,则以上一周期计算的试验轨迹去掉第一点作为该周期的试验轨迹;步骤s6,输出该周期的规划结果,,并选择;步骤s7,递增k:k=k+1,并转至步骤s3;步骤s8,输出规划的整条轨迹,并满足终点约束。
7.进一步,在所述步骤s1中,将机械臂轨迹规划由关节空间或笛卡尔空间的高维转换至一维的s域规划,得到规划,得到规划,得到。
8.进一步,在步骤s3中,采用求解线性常微分方程中的打靶法计算出一条试验轨迹序列。
9.根据本发明实施例的高效的时间最优轨迹在线生成方法,解决了现有的机械臂在运行中面临着控制系统算力有限的问题,满足实际环境复杂需要可靠安全的急停,同时,为了提高生产效率,加快机器人运行节拍,要求轨迹满足时间最优。
10.本发明将轨迹由轨迹规划由高维的关节空间或笛卡尔空间转换至一维的s域规划,可以极大的减小规划复杂度,提高计算效率。计算量小,能够满足时变约束下的在线计算,提高控制系统带宽。计算的轨迹满足机械臂驱动器的实际约束,充分发挥驱动器性能。
11.本发明附加的方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
附图说明
12.本发明的上述和/或附加的方面和优点从结合下面附图对实施例的描述中将变得明显和容易理解,其中:图1为根据本发明实施例的高效的时间最优轨迹在线生成方法的流程图。
具体实施方式
13.下面详细描述本发明的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,旨在用于解释本发明,而不能理解为对本发明的限制。
14.如图1所示,本发明实施例的高效的时间最优轨迹在线生成方法,包括如下步骤:步骤s1,利用弧长参数化,将预定义路径的长度和约束信息转换至弧长s域中,将机械臂轨迹规划由关节空间或笛卡尔空间的高维转换至一维的s域规划,并计算s域对应的约束。
15.在步骤s1中,将机械臂轨迹规划由关节空间或笛卡尔空间的高维转换至一维的s域规划,得到
。
16.式中,分别表示为s的起始点和终止点,分别表示为速度的最大值和最小值,分别表示为加速度的最大值和最小值。
17.步骤s2,设置规划起始点,迭代次数k=0,输入为加加速度u,其上下界为,控制周期t。
18.步骤s3,计算出一条试验轨迹序列;其中,该轨迹的初始条件是轨迹的当前状态,横截条件是,并令。分别表示计算得到的轨迹离散点,分别表示对应的输入。
19.在本发明的实施例中,采用求解线性常微分方程中的打靶法计算出一条试验轨迹序列。
20.步骤s4,如果试验轨迹的终点大于轨迹的终点,则以轨迹终点作为横截条件,并释放约束 ;如果试验轨迹计算成功,则转至步骤s8。
21.步骤s5,如果试验轨迹计算失败,则以上一周期计算的试验轨迹去掉第一点作为该周期的试验轨迹。
22.式中,表示上一周期计算得到的轨迹离散点,表示对应的输入。
23.步骤s6,输出该周期的规划结果,,并选择。
24.步骤s7,递增k:k=k+1,并转至步骤s3。
25.步骤s8,输出规划的整条轨迹,并满足终点约束。
26.综上,本发明采用求解线性常微分方程中的打靶法,在线更新系统的状态方程,在每个控制周期中生成一条试验轨迹,如果试验轨迹不超过物理约束,则使用该控制周期生成的试验轨迹,否则使用上个周期生成的试验轨迹。为了保证加速度连续,采用三阶系统,加加速度有界,通过求解加速度的加速和减速时间生成
一条试验轨迹,生成的轨迹满足时间最优,而且保证加速度连续及加加速度有界,可以有效的减小轨迹不必要的抖动。
27.根据本发明实施例的高效的时间最优轨迹在线生成方法,解决了现有的机械臂在运行中面临着控制系统算力有限的问题,满足实际环境复杂需要可靠安全的急停,同时,为了提高生产效率,加快机器人运行节拍,要求轨迹满足时间最优。
28.本发明将轨迹由轨迹规划由高维的关节空间或笛卡尔空间转换至一维的s域规划,可以极大的减小规划复杂度,提高计算效率。计算量小,能够满足时变约束下的在线计算,提高控制系统带宽。计算的轨迹满足机械臂驱动器的实际约束,充分发挥驱动器性能。
29.在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、
ꢀ“
示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
30.尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本发明的限制,本领域的普通技术人员在不脱离本发明的原理和宗旨的情况下在本发明的范围内可以对上述实施例进行变化、修改、替换和变型。本发明的范围由所附权利要求及其等同限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1