新型门锁执手的制作方法
1.本发明涉及一种新型门锁执手。
背景技术:
2.现有的门锁执手离合机构通常采用电磁铁结构。如图1所示,包括用于安装方杆的离合芯901、离合销902和电磁铁903。该离合芯901上设有供离合销902的首端插入的凹口904,该离合销902的末端设有永磁体905,电磁铁 903用于驱使离合销902在一接合位置和一分离位置之间滑动,例如,电磁铁通入正向电流时与永磁体相吸而驱使离合销从接合位置滑动至分离位置,而电磁铁通入反向电流时与永磁体相斥而驱使离合销从分离位置滑动至接合位置;该离合销于其处于接合位置时插入离合芯的凹口内,该离合销于其处于分离位置时拔出离合芯的凹口外,由此而实现接合与分离。然而该现有技术存在如下缺陷,在门锁外使用另一永磁体906与离合销的永磁体相吸而够带动离合销滑动,失去防盗的功能,安全性有待提高。
技术实现要素:
3.本发明的目的在于提出一种新型门锁执手,包括执手壳体和用于安装方杆的离合芯,该离合芯可相对执手壳体转动地设于执手壳体内;该执手壳体内设有可选择地使执手壳体与离合芯接合或分离的离合机构;该离合芯上设有凹口;该离合机构包括离合销和用于驱使离合销在一接合位置和一分离位置之间滑动的驱动机构;该离合销于其处于接合位置时插入离合芯的凹口内;该离合销于其处于分离位置时拔出离合芯的凹口外;该驱动机构包括推动块、电机、驱动轴和传动弹簧;该推动块可滑动地安装于执手壳体内;该离合销固定地安装于推动块上;该电机固定地安装于执手壳体内,该驱动轴固定地安装于电机的输出轴上,该驱动轴的轴线与电机的输出轴的轴线重合;该推动块内设有用于收容传动弹簧的容腔,该传动弹簧安装于容腔内;该驱动轴穿过传动弹簧;该传动弹簧呈螺旋状而具有螺旋空间,该驱动轴上设有伸入传动弹簧的螺旋空间中的径向销。
4.本发明采用传动弹簧实现将驱动轴的转动转换为推动块和离合销的移动,以代替现有的电磁驱动的方式,可解决现有技术中安全性的问题,且利用传动弹簧的可压缩拉伸的特性,可避免出现离合销和推动块出现卡死现象,也避免出现因过载而烧毁电机的现象。
附图说明
5.图1示出了现有的门锁执手离合机构示意图;
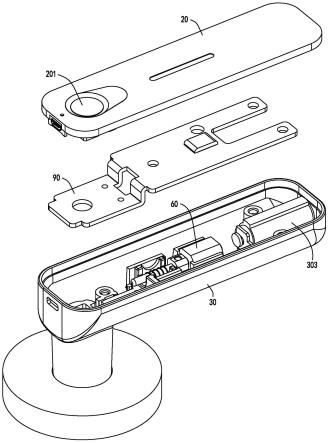
6.图2示出了本发明的立体图;
7.图3示出了打开面壳后的示意图;
8.图4示出了在隐藏面壳后将离合芯、离合销及驱动机构分离于底壳后的示意图;
9.图5示出了在隐藏面壳后的俯视图;
10.图6示出了在图5的基础上将将离合芯、离合销及驱动机构分离于底壳后的示意
图;
11.图7示出了本发明的离合销处于分离位置的示意图;
12.图8示出了本发明的离合销处于接合位置的示意图;
13.图9和图10分别示出了本发明的离合销及驱动机构的两个不同角度的立体图;
14.图11示出了切除局部推动块后的示意图;
15.图12示出了在图11的基础上将各部件分解后的示意图;
16.图13示出了本发明增加定位机构后的立体图;
17.图14和图15分别示出了定位机构与离合销配合的两个不同角度的立体图;
18.图16示出了定位机构与离合销的立体分解图;
19.图17示出了离合销的凹口与离合销对准的示意图;
20.图18示出了离合销的凹口与离合销错开的示意图。
21.附图标号:
22.10离合芯、101凹口、102离合芯的侧面、103平面部、104压缩弹簧、 105平片;
23.20面壳、201指纹开锁模块;
24.30底壳、301第一滑槽、302第二滑槽、303机械锁芯;
25.40离合销;
26.50推动块、501容腔、502容腔的前壁、503容腔的后壁、504压力传感器、505长槽;
27.60电机;
28.70驱动轴、701径向销;
29.80传动弹簧、801螺旋空间、802传动弹簧的前端、803传动弹簧的后端、 804弹腿。
具体实施方式
30.如下结合附图,对本技术方案作进一步描述。
31.实施例一
32.如图1至图8所示的一种新型门锁执手,包括执手壳体和用于安装方杆(图中未示出)的离合芯10,本实施例中,该执手壳体包括面壳20和底壳30拼合而成,该离合芯10可相对执手壳体转动地设于执手壳体内;
33.该执手壳体内设有可选择地使执手壳体与离合芯10接合或分离的离合机构;
34.该执手壳体与离合芯接合时,执手壳体与离合芯之间传递动力,通过转动执手壳体而带动离合芯转动;
35.该执手壳体与离合芯分离时,执手壳体与离合芯之间不传递动力而空转;
36.该离合芯10上设有凹口101;
37.该离合机构包括离合销40和用于驱使离合销40在一接合位置和一分离位置之间滑动的驱动机构;
38.该离合销40于其处于接合位置时插入离合芯的凹口101内;
39.该离合销40于其处于分离位置时拔出离合芯的凹口101外;
40.该驱动机构包括推动块50、电机60、驱动轴70和传动弹簧80;
41.该推动块50可滑动地安装于执手壳体内;
42.该离合销40固定地安装于推动块50上而跟随推动块滑动;
43.该电机60固定地安装于执手壳体内,该驱动轴70固定地安装于电机60 的输出轴上而跟随电机的输出轴转动,该驱动轴的轴线与电机的输出轴的轴线重合;
44.该推动块50内设有用于收容传动弹簧80的容腔501,该传动弹簧80安装于容腔501内;
45.该驱动轴70穿过传动弹簧80;
46.该传动弹簧80呈螺旋状而具有螺旋空间801,该驱动轴70上设有伸入传动弹簧的螺旋空间801中的径向销701,在驱动轴70转动时,径向销701能够驱使传动弹簧前后移动。
47.该技术方案采用传动弹簧实现将驱动轴的转动转换为推动块和离合销的移动,以代替现有的电磁驱动的方式,可解决现有技术中安全性的问题,且利用传动弹簧的可压缩拉伸的特性,可避免出现离合销和推动块出现卡死现象,也避免出现因过载而烧毁电机的现象。本实施例中,该传动弹簧为螺旋压缩弹簧。
48.该推动块50为非磁性物质,以避免被外部永磁体吸引。
49.该执手壳体内设有用于引导推动块50滑动的第一滑槽301,该推动块50 可滑动地安装于第一滑槽301中;
50.该执手壳体内还设有用于引导离合销40滑动的第二滑槽302,该离合销 40可滑动地安装于第二滑槽302中。
51.该推动块50上设有与容腔501连通的长槽505,该长槽505的长度方向平行于驱动轴70的轴线方向;
52.该传动弹簧的前、后两端分别设有伸入长槽505内的弹腿804,以避免传动弹簧发生旋转。
53.本实施例中,该执手壳体内还设有机械锁芯303和指纹开锁模块201,该机械锁芯通过使用钥匙的旋转来带动离合销的滑动,该指纹开锁模块能够在识别相应的指纹后控制电机。
54.如图3和图4所示,在执手壳体内还设有一呈“z”字形的盖板90,该盖板90被设置成用于用于压靠以盖住离合芯、离合销、推动块及电机以对他们在上下位置的定位,以避免他们在移动过程中发生上下跳动。此外,盖板90 也可以起到保护离合芯、离合销、推动块及电机的作用,更好地防止人为破坏。该盖板90可以是金属件。
55.实施例二
56.本实施例是在实施例一的基础上增加如下技术方案。
57.如图9至图12所示,该传动弹簧的前端802抵靠在容腔的前壁502,该传动弹簧的后端803抵靠在容腔的后壁503;
58.沿离合销40从分离位置向接合位置滑动的方向,传动弹簧的前端802位于传动弹簧的后端803的前方;
59.该容腔的前壁502设有压力传感器504,该传动弹簧的前端802抵靠在压力传感器804上,以通过压力传感器测量传动弹簧推动容腔的前壁的作用力;
60.该执手壳体内还设有控制电路(图中未示出);
61.该压力传感器504和电机60分别与控制电路电连接。
62.该技术方案通过设置压力传感器能够检测传动弹簧的前端对容腔的前壁的作用力以判断电机是否出现过载,此外,可通过控制电路设置压力传感器的检测阈值m1,当压力
传感器检测到传动弹簧的前端对容腔的前壁的作用力大于等于检测阈值m1时,控制电路控制电机停机,由此以有效地保护电机。
63.如图13至图18所示,该执手壳体内设有使离合芯的凹口101对准离合销 40的定位机构,该定位机构可提高离合芯的凹口101对准离合销40的精度;
64.该离合芯的侧面102上设有平行于离合芯10轴线的平面部103,本实施例中,该凹口101设于离合芯的侧面102处;
65.该定位机构包括压缩弹簧104和平片105,该压缩弹簧104设于执手壳体与平片105之间,以使平片105始终抵靠离合芯的侧面102;
66.该离合芯的凹口101于平片105与离合芯的侧面的平面部103平行且相抵靠时对准离合销40。
67.由于执手壳体与离合芯分离时,执手壳体能够相对离合芯空转,这样会导致离合销与离合芯的凹口发生错位,而通过设置的定位机构能够在执手壳体空转后回到原始位置时使离合销与离合芯的凹口对准,以便于离合销插入离合芯的凹口。此外,该技术方案公开的定位机构采用压缩弹簧和平片的配合具有结构简单,便于实施的优点。本实施例中通过设置压缩弹簧的定位机构即能够实现定位,也能够使得执手壳体顺利地相对离合芯空转。
68.本实施例中,该压缩弹簧的一端连接执手壳体,该压缩弹簧的另一端连接平片。
69.本实施例的其它结构与实施例一相同,此处不再赘述。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1