一种基于双稳态折纸的多抓取模式软体抓手
1.本发明涉及软体机器人技术,尤其是一种基于双稳态折纸的仿人手的软体抓手。
背景技术:
2.软体机器人技术得到了社会的广泛关注,并且发展迅速。与传统的刚性抓手相比,软体抓手一般是由可发生较大变形的软材料或结构构成,具有柔顺性好,适应性强等特点,可以有效地抓取各种形状或易碎的物体。多数软体抓手只具备单一的抓取模式,例如依靠弹性变形来抓取物体的软体抓手只能缓慢地抓取物体,而无法实现快速抓取;依靠稳态改变来抓取物体的双稳态抓手只能快速地抓取物体,而无法实现缓慢抓取等,而且这种快速抓取对易碎物体并不友好。这些问题阻碍了软体抓手在实际中的进一步应用。
技术实现要素:
3.本发明的目的在于改善传统软体抓手抓取速度慢、抓取模式单一、结构复杂等缺点,提供一种基于双稳态折纸的多抓取模式软体抓手。
4.本发明的技术方案如下:
5.一种基于双稳态折纸的多抓取模式软体抓手包括双稳态折纸结构,刚性连接件,软体手指,折纸驱动器,密封底板和充气、抽气系统等。所述软体手指通过刚性连接件与双稳态折纸结构相连;所述双稳态折纸结构包括双稳态拱状折纸结构和柔性侧壁,所述柔性侧壁的上端与双稳态拱状折纸结构固定连接,下端固定在密封底板上;所述双稳态折纸结构和密封底板构成外部折纸气囊;所述折纸驱动器设于外部折纸气囊内,所述折纸驱动器包括上下两个端板以及柔性折纸侧壁,三者共同构成内部折纸气囊,其中上端板与双稳态拱状折纸结构内侧相连,下端板固定在密封底板上。所述的双稳态折纸结构由软材料(tpu)3d打印加工制成,在双稳态折纸结构的内外两侧均贴有pvc板(贴的时候需预留出折痕位置),pvc板的形状与双稳态折纸结构的折叠面为相似形状。双稳态折纸结构的折痕位置为软材料(tpu),因此双稳态折纸结构可以依据折痕的布置发生折展变形。双稳态折纸结构具有两个稳定状态:初始状态和抓取状态。在双稳态折纸结构顶部施加外力时,其会由初始状态快速切换到抓取状态,此过程中连接在双稳态折纸结构上的软体手指会向彼此迅速靠拢,实现快速被动抓取动作。对内部折纸气囊内施加负压同样可以使双稳态折纸结构由初始状态快速切换到抓取状态,实现快速主动抓取。当对内部折纸气囊施加正压时,双稳态折纸结构将从抓取状态快速向初始状态切换,实现快速释放动作。重复以上驱动方法,该软体抓手可以实现重复、快速地抓取和释放动作。另外,当在内部折纸气囊内部施加负压,外部折纸气囊内施加正压时,双稳态折纸结构可以由初始状态缓慢地切换到抓取状态,实现缓慢主动抓取动作。当在内部折纸气囊内部施加正压,外部折纸气囊施加负压时,双稳态折纸结构可以由抓取状态缓慢地切换到初始状态,实现缓慢主动释放动作。
6.上述技术方案中,进一步地,将基本折纸单元分别沿x和y轴分别阵列4次可得到柔性折纸侧壁的折叠图案。另外,柔性折纸侧壁是由内外两层塑料薄膜和夹在其中的pvc板组
成,pvc板的形状与折纸驱动器折叠面的形状相似(pvc板放置时需避开折痕位置)。折纸驱动器的折痕位置为可发生变形塑料薄膜,因此折纸驱动器可以依据折痕的布置发生轴向伸长或收缩变形。塑料薄膜的厚度较小(0.05mm),因此塑料薄膜作为折痕的刚度也较小,进一步地,折痕折展所消耗的能量也较少,这有利于将气压输入的能量主要用来引起双稳态折纸结构的稳态转换,提高能量效率。折纸驱动器的上下两个端板均为3d打印制成,上端板粘贴在双稳态折纸结构的内侧,保证二者可以同时运动。下端板为平面薄板,薄板上留有一个气孔,通过该气孔,可以对内部折纸气囊进行充气和抽气。
7.进一步地,所述的软体手指用ecoflex材料由模具浇筑制成。所述的刚性连接件用树脂材料经3d打印制成。刚性连接件的一端是三角形薄板,粘贴在双稳态折纸结构上,另一端为半圆柱体,软体手指嵌套在该半圆柱体上。刚性连接件的两端具有一定的夹角,以保证软体抓手的抓取效果。
8.更进一步地,所述的密封底板用树脂材料经3d打印制成。密封底板上有三个气孔,中间气孔与内部折纸气囊相连通;另外两个气孔与外部气囊相连通,向两个气孔同时充气、抽气可以保证外部折纸气囊内的各部分气压较为均匀地变化。在保证折纸驱动器下端板的气孔与密封底板中间气孔对齐的情况下,将折纸驱动器与密封底板粘贴在一起。并且将双稳态折纸结构的末端的延伸部分与密封底板的侧面粘贴在一起。
9.本发明的有益效果是:
10.本发明采用的基于双稳态折纸的软体抓手通过气压驱动的方式来实现多种抓取模式。该抓手可以根据不同的抓取需求,通过气压控制折纸驱动器和双稳态折纸结构来实现快速被动抓取动作或快速主动抓取(释放)动作或主动缓慢抓取(释放)动作。该抓手具有抓取模式可控、响应速度可控、成本低等优点,并且具有较强的功能性和较广阔的适用范围:可以应用于空间捕获系统,抓取快速移动的物体;也可以应用于工业机器人的操作手,快速、重复地抓取各种易碎物体。
附图说明:
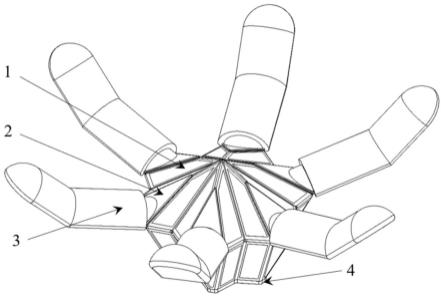
11.图1是基于双稳态折纸的具有多种抓取模式的软体抓手的结构示意图;
12.图2是基于双稳态折纸的具有多种抓取模式的软体抓手的剖面意图;
13.图3是刚性连接件的结构示意图;
14.图4是软体手指的结构示意图;
15.图5是密封底板的结构示意图;
16.图6:(1)是双稳态折纸结构的示意图;(2)是双稳态拱状折纸结构示意图;(3)是双稳态拱状折纸单元示意图;(4)是柔性侧壁示意图;(5)是柔性侧壁单元示意图;
17.图7:(1)是折纸驱动器的结构示意图;(2)是一个折纸单元示意图;(3)是上端板结构示意图;(4)是下端板结构示意图。
18.其中,1:双稳态折纸结构;2:刚性连接件;3:软体手指;4:密封底板;5:折纸驱动器;6:pvc板;7:tpu折痕;8:双稳态拱状折纸结构;9:双稳态拱状折纸结构的一个单元;10:柔性侧壁;11:柔性侧壁的一个单元;12:折纸驱动器的上端板;13:塑料薄膜折痕;14:折纸驱动器下端板。
具体实施方式
19.下面结合附图对本发明的方案做进一步的说明解释。
20.如图1所示为本发明的基于双稳态折纸的多抓取模式软体抓手,所述软体抓手主要由双稳态折纸结构1、刚性连接件2、软体手指3、密封底板4和折纸驱动器5组成。
21.如图6(1)为本发明的双稳态折纸结构1。所述双稳态折纸结构1用tpu材料经3d打印制成,在其内外两侧均贴有pvc板6(需避开折痕),pvc板6的形状与双稳态折纸结构1的折叠面形状相似。双稳态折纸结构1的折痕7所在位置为软材料(tpu),因此双稳态折纸结构1可以依据折痕7的布置发生折展变形。双稳态折纸结构1有两个稳定状态:初始状态和抓取状态。所述双稳态折纸结构1包括双稳态拱状折纸结构8和柔性侧壁10。所述双稳态拱状折纸结构8(如图6(2))的任意相邻的峰折痕和谷折痕沿环向间隔30
°
均匀交替布置。每条峰折痕延长一段后在合适的位置(图中m点,该峰折痕与两条谷折痕形成的平面(即opq平面)之间的夹角为67.97
°
)分为两条峰折痕。柔性侧壁10为圆台状折面结构,并有若干条峰折痕和谷折痕。所述双稳态拱状折纸结构8包括若干折纸单元(如图6(3)),每个折纸单元包括一条峰折痕和两条谷折痕(两条相邻谷折痕在空间中形成的夹角是49.86
°
),在峰折痕的m点分为两条峰折痕。两条峰折痕与底部形成的平面用于固定刚性连接件2(如图3,刚性连接件2的一端为三角形薄板),从而将软体手指固定在双稳态折纸结构1上。柔性侧壁10为圆台状折面结构(如图6(4)),并有若干条峰折痕和谷折痕,所述柔性侧壁10的峰折痕与双稳态拱状折纸结构8的峰折痕在连接面上的端点重合,二者的谷折痕在连接面上的端点也是重合的。如图6(5)展示了柔性侧壁的一个单元11,这个单元与双稳态拱状折纸结构8的折纸单元一一对应。
22.如图7(1)为本发明的折纸驱动器5。所述的柔性折纸侧壁为棱柱状,其基本折纸单元为矩形,在基本折纸单元的中间水平线上设置一个节点d,该节点d连接三条谷折痕(ad,bd,de)和一条峰折痕cd,并将一个基本折纸单元分割成由两种折叠面构成的四个部分;两种折叠面分别为由一条峰折痕cd,一条谷折痕(ad)和单元边界围成的三角形折叠面以及由两条谷折痕(ad和de)和单元边界围成的梯形折叠面。通过将基本折纸单元分别沿x和y轴分别阵列4次即可得到柔性折纸侧壁的折叠图案,并将所有的基本折纸单元绕y向闭合可形成柔性折纸侧壁。另外,柔性折纸侧壁由内外两层塑料薄膜和夹在其中的pvc板6组成,pvc板6的形状与折纸驱动器5折叠面的形状相似。折纸驱动器5的折痕位置为可发生变形的塑料薄膜折痕13,因此折纸驱动器5可以依据折痕的布置发生轴向伸长或收缩变形。
23.折纸驱动器5轴向收缩(伸长)的实现方法:(1)轴向收缩:对折纸驱动器5抽气时,柔性折纸侧壁折叠,折纸驱动器的上下端板12和14之间的距离逐渐减小。(2)轴向伸长:对折纸驱动器5充气时,柔性折纸侧壁展开,折纸驱动器的上下端板12和14之间的距离逐渐增大。
24.双稳态折纸结构1不同抓取模式的实现方法:(1)快速被动抓取:当被抓物体与双稳态折纸结构1相互接触产生的压力作用在其峰折痕上时,双稳态拱状折纸结构向四周扩展,其顶点向下运动,随着接触压力进一步增大,当双稳态折纸结构1构型越过弹性势能最大状态后会快速向抓取状态转换。(2)快速主动抓取:对内部折纸气囊抽气,折纸驱动器5发生的收缩变形向双稳态折纸结构1提供拉力,在拉力的作用下,随着负压的增大,双稳态折纸结构1逐渐越过弹性势能最大位置,快速向抓取状态转换。(3)快速主动释放:对内部折纸
气囊充气,折纸驱动器5产生轴向伸长,对双稳态折纸结构1施加压力,随着正压的增大,双稳态折纸结构1逐渐越过弹性势能最大位置,快速向初始状态转换。重复(2)和(3),该双稳态抓手可以实现重复、快速的抓取和释放动作。(4)缓慢主动抓取:当在内部折纸气囊内部施加负压,外部折纸气囊施加正压时,适当减小正压的数值后,双稳态折纸结构1的构型会逐渐向势能最大状态过渡,当双稳态折纸结构1构型越过势能最大状态后,将内部折纸气囊中的负压恢复到周围环境气压,同时逐渐减小外部折纸气囊内的正压,在此过程中,双稳态折纸结构1会缓慢的切换到抓取状态,实现缓慢主动抓取物体。(5)缓慢主动释放:当双稳态折纸结构1处于抓取状态时,驱动方式与(4)相反,具体为对内部折纸气囊内部施加正压,外部折纸气囊施加负压,适当减小负压的数值后,双稳态折纸结构1的构型会逐渐向势能最大状态过渡,当双稳态折纸结构1构型越过势能最大状态后,将内部折纸气囊中的正压恢复到周围环境气压,同时逐渐减小外部折纸气囊内的负压,在此过程中,双稳态折纸结构1会缓慢的切换到初始状态,实现缓慢主动释放物体。重复(4)和(5),该双稳态抓手可以实现重复地缓慢的抓取和释放动作。
25.本发明的一种基于双稳态折纸的多抓取模式软体抓手具有抓取模式可控、响应速度可控、成本低等优点,该软体抓手可以应用于空间捕获系统,抓取快速移动的物体;也可以应用于工业机器人的操作手,快速、重复地抓取各种易碎物体,具有广阔的应用场景和较强的发展潜力。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1