一种果园、林地及丘陵山地多功能智能运动作业平台设施
1.本发明涉及到一种运动作业平台设施,具体涉及一种多功能果园、林地及丘陵山地运动作业平台设施,该运动作业平台设施可适用于各类果园、林地及丘陵山地作业,属于农业机械技术领域。
背景技术:
2.并联机器人具有精度高、速度快、刚度高、稳定性强、力度适宜以及结构紧凑等优点,弥补了串联机器人的不足,扩宽了并联机器人的应用范围,但现有并联机器人的机械手臂转动范围有限,使其不能满足多工位、大范围的作业。
3.果园、林地及丘陵山地的地势复杂,生产作业及运输非常不方便,因此主要以人工作业为主,生产效率低,人工成本高,而且人工作业不安全,严重制约了生产发展。果园、林地及丘陵山地的作物及设备运输如果修建专门的运输道路不仅修建成本高,而且还占用大量的土地。在果园、林地及丘陵山地铺设轨道,让轨道车沿着轨道行走已被越来越多的设计应用。针对果园、林地及丘陵山地作业和运输困难的现状,需要设计一种与预设轨道相匹配的结构简单、运行平稳的轨道车来满足未来市场的需要。
4.随着自动化、智能化技术的不断提高,机器人应用越来越广泛,机器人技术在农业和工业等各个领域发挥着巨大的作用,机器人技术的成熟和发展必将推动人类社会的巨大进步。针对果园、林地及丘陵山地作业和运输困难的现状,本发明提出一种果园、林地及丘陵山地多功能智能运动作业平台设施,对提高生产效率、降低生产成本有着积极的作用,较大程度上解决劳动力不足的问题。
技术实现要素:
5.本发明的目的在于针对现有生产难题,提出一种果园、林地及丘陵山地多功能智能运动作业平台设施,在智能控制系统运作下该运动作业平台设施能够多功能、自动化、智能化、集约化地实现花粉(药)采集与授粉、修剪、采摘、割草(灌)、开穴、起苗、栽种、松土、开沟、施肥以及作物及设备运输等工作,节省大量人力资源,减轻劳动强度和劳动力成本,增强了设施的最大功能化,提高果园、林地及丘陵山地的生产效率。
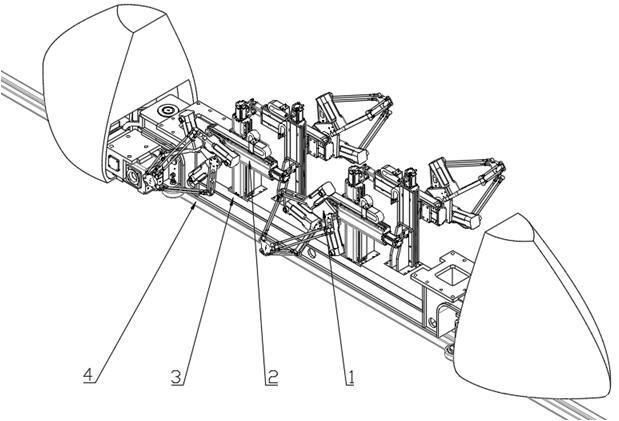
6.为了达到这一目的,本发明申请通过如下技术方案来实现;本发明提供一种果园、林地及丘陵山地多功能智能运动作业平台设施,其特征在于,包括并联机械手(1)、双伺服丝杆基座(2)、运动作业平台(3)、单轨道(4);相对于垂直方向,若干组并联机械手(1)连接在若干组双伺服丝杆基座(2)上,若干组双伺服丝杆基座(2)固定在运动作业平台(3)上,并以运动作业平台(3)的中心向两侧均匀分布,运动作业平台(3)支撑在单轨道(4)上,并沿着单轨道(4)运动;所述并联机械手(1)包括视觉导航系统(101)、动平台(102)、从动连杆(103)、主动连杆(104)、伺服电机(105)、安装板(106)、固定板(107);所述双伺服丝杆基座(2)包括拖链(201)、滑动块(202)、支座架(203)、第一伺服电
动丝杆(204)、第二伺服电动丝杆(205);所述运动作业平台(3)包括前排障器(301)滚轮套筒(302)、轨道车身(303)、大轨道扶轮(304)、小轨道扶轮(305)、主动轮(306)、动力系统(307)、后排障器(308)。
7.进一步地,所述并联机械手(1)上的固定板(107)连接在双伺服丝杆基座(2)的滑动块(202)上,安装板(106)上固定有三组伺服电机(105),每组伺服电机(105)输出端与主动连杆(104)连接,主动连杆(104)、从动连杆(103)与动平台(102)三者通过球形副串联连接,伺服电机(105)末端安装有视觉导航系统(101)。
8.进一步地,所述主动连杆(104)的长度为10mm~1000mm,从动连杆(103)的长度为20mm~1500mm,并联机械手(1)伸长时的工作半径为30mm~2500mm,所述三组伺服电机(105)之间呈30
°
~120
°
夹角,运动机构由主动连杆(104)和从动连杆(103)组成,形成闭环机构,运动刚性好、平稳性高,通过控制伺服电机(105)转动角度来实现动平台(102)在空间多自由度的运动。
9.进一步地,所述双伺服丝杆基座(2),相对于竖直方向,支座架(203)固定在运动工作平台(3)的轨道车身(303)上,第一伺服电动丝杆(204)连接于支座架(203)上;相对于水平方向,所述第二伺服电动丝杆(205)滑动安装在第一伺服电动丝杆(204)上方,第二伺服电动丝杆(205)与第一伺服电动丝杆(204)互相垂直设置,第二伺服电动丝杆(205)设置有滑动块(202),第一伺服电动丝杆(204)与第二伺服电动丝杆(205)侧面设置有拖链(201),轨道车身(303)两侧对称设有多组双伺服丝杆基座(2),可实现在轨道车身(303)两侧同时作业,提高了作业范围和作业效率。
10.进一步地,所述第一伺服电动丝杆(204)和第二伺服电动丝杆(205)的长度为10mm~4000mm,第二伺服电动丝杆(205)设置有滑动块(202),滑动块(202)连接的并联机械手(1)的可移动范围为8mm~3200mm。
11.进一步地,所述运动作业平台(3),轨道车身(303)前后两端设有前排障器(301)与后排障器(308),轨道车身(303)前后两端及车身下方均匀设有若干组滚轮套筒(302),滚轮套筒(302)沿着单轨道(4)左右两侧设有大轨道外轮(304)与小轨道外轮(305),大轨道扶轮(304)水平放置,大轨道扶轮(304)侧部轮面与单轨道(4)最外端侧面接触,单轨道(4)内侧有竖直放置的小轨道扶轮(305),小轨道扶轮(305)顶部轮面与单轨道(4)内侧顶部面接触,滚轮套筒(302)内部装有主动轮(306),主动轮(306)沿着单轨道(4)的上支撑面运动,动力系统(307)的输出端与主动轮(306)连接,主动轮(306)外包裹一种防滑耐磨材料,大轨道扶轮(305)、小轨道扶轮(304)均为阻尼轮。
12.进一步地,所述主动轮(306)的直径为20mm~500mm,大轨道扶轮(304)的直径为10mm~250mm,小轨道扶轮(305)的直径为5mm~125mm,轨道车身(303)的长度为50mm~10000mm,宽度为10mm~2000mm,前排障器(301)、后排障器(308)的长度为10mm~3000mm,宽度为20mm~2400mm、高度为30mm~4000mm。
13.进一步地,所述单轨道(4)为工字型轨道,可支撑运动作业平台(3)沿着单轨道(4)上行走。
14.本发明专利的优点:本发明采用了单轨道(4)与运动作业平台(3)作为移动支撑,实现了运动作业平台(3)在果园、林地及丘陵山地铺设的单轨道(4)上平稳移动;将多组并联机械手(1)连接于多组双伺服丝杆基座(2)上,轨道车身(303)两侧对称设有多组双伺服
丝杆基座(2),可实现若干组并联机械手(1)在轨道车身(303)两侧同时作业,提高了作业范围和作业效率;本发明应用并联机械手(1)精度高、速度快、刚度高、稳定性强、力度适宜以及结构紧凑的优点,在并联机械手(1)前端动平台(102)上可安装各类农业器械,通过伺服电机(105)末端安装的视觉导航系统(101)多方位识别和定位来实现多功能、自动化、智能化、集约化的果园、林地及丘陵山地的生产作业,可大大提高生产效率,大幅降低生产成本,有力推动农业智能化生产的发展,意义重大。
附图说明
15.图1是本发明整体结构示意图。
16.图2是本发明并联机械手结构示意图。
17.图3是本发明双伺服丝杆基座结构示意图。
18.图4是本发明运动作业平台结构示意图。
19.图5是本发明运动作业平台另一视角结构示意图。
20.附图标记:1-并联机械手、2-双伺服丝杆基座、3-运动作业平台、4-单轨道、101-视觉导航系统、102-动平台、103-从动连杆、104-主动连杆、105-伺服电机、106-安装板、107-固定板、201-拖链、202-滑动块、203-支座架、204-第一伺服电动丝杆、205-第二伺服电动丝杆、301-前排障器、302-滚轮套筒、303-轨道车身、304-大轨道扶轮、305-小轨道扶轮、306-主动轮、307-动力系统、308-后排障器。
具体实施方式
21.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
22.在本发明的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
23.在本发明中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
24.参照附图1-5,一种果园、林地及丘陵山地多功能智能运动作业平台设施,其特征在于,包括并联机械手1、双伺服丝杆基座2、运动作业平台3、单轨道4;相对于垂直方向,若干组并联机械手1连接在若干组双伺服丝杆基座2上,若干组双伺服丝杆基座2固定在运动作业平台3上,并以运动作业平台3的中心向两侧均匀分布,运动作业平台3支撑在单轨道4上,并沿着单轨道4运动;所述并联机械手1包括视觉导航系统101、动平台102、从动连杆103、主动连杆104、
伺服电机105、安装板106、固定板107;所述双伺服丝杆基座2包括拖链201、滑动块202、支座架203、第一伺服电动丝杆204、第二伺服电动丝杆205;所述运动作业平台3包括前排障器301滚轮套筒302、轨道车身303、大轨道扶轮304、小轨道扶轮305、主动轮306、动力系统307、后排障器308。
25.并联机械手1上的固定板107连接在双伺服丝杆基座2的滑动块202上,安装板106上固定有三组伺服电机105,伺服电机105把电信号转化为输出轴端的角速度或角位移的输出,使控制速度、位置精度非常准确,每组伺服电机105输出端与主动连杆104连接;主动连杆104、从动连杆103与动平台102三者通过球形副串联连接,增加了并联机械手1的灵敏度;伺服电机105末端安装有视觉导航系统101。
26.主动连杆104的长度为10mm~1000mm,从动连杆103的长度为20mm~1500mm,并联机械手1伸长时的工作半径为30mm~2500mm,所述三组伺服电机105之间呈30
°
~120
°
夹角,运动机构由主动连杆104和从动连杆103组成,形成闭环机构,运动刚性好、平稳性高,通过控制伺服电机105输出端转动来实现动平台102在空间多自由度的运动。
27.双伺服丝杆基座2,相对于竖直方向,支座架203固定在运动作业平台3的轨道车身303上,第一伺服电动丝杆204连接于支座架203上;相对于水平方向,所述第二伺服电动丝杆205滑动安装在第一伺服电动丝杆204上方,第二伺服电动丝杆205与第一伺服电动丝杆204垂直设置,第二伺服电动丝杆205设置有滑动块202,使得滑动块202连接的并联机械手1能在两个不同方向移动,第一伺服电动丝杆204与第二伺服电动丝杆205侧面设置有拖链201,保护和牵引内置的电缆,轨道车身303两侧对称设有多组双伺服丝杆基座2,可实现在轨道车身303两侧同时作业,提高了作业范围和作业效率。
28.第一伺服电动丝杆204和第二伺服电动丝杆205的长度为10mm~4000mm,第二伺服电动丝杆205设置有滑动块202,滑动块202连接的并联机械手1的可移动范围为8mm~3200mm。
29.运动作业平台3,轨道车身303前后端设有前排障器301与后排障器308,前排障器301、后排障器308用于排除运动作业平台3在移动过程中的障碍,轨道车身303前后两端及车身下方均匀设有若干组滚轮套筒302,滚轮套筒302沿着单轨道4左右两侧设有大轨道外轮304与小轨道外轮305,大轨道扶轮304水平放置,大轨道扶轮304侧部轮面与单轨道4最外端侧面接触,单轨道4内侧有竖直放置的小轨道扶轮305,小轨道扶轮305顶部轮面与单轨道4内侧顶部面接触,防止运动作业平台3载荷时发生侧倾的危险,滚轮套筒302内部装有主动轮306,主动轮306沿着单轨道4的上支撑面运动,动力系统307的输出端与主动轮306连接;主动轮306外包裹一种防滑耐磨材料,大轨道扶轮305、小轨道扶轮304均为阻尼轮。
30.单轨道4为工字型轨道,可支撑运动作业平台3沿着单轨道4上行走。
31.本发明的具体工作过程如下:首先运动作业平台3在动力系统307的驱动下,沿着单轨道4移动到作业对象附近,运动作业平台3沿着单轨道4两侧对称设有大轨道扶轮304和小轨道扶轮305,使运动作业平台3在单轨道4上平稳行走,通过视觉导航系统101多方位识别和定位作业对象,运动作业平台3上设有多组双伺服丝杆基座2将多组并联机械手1移动到作业对象旁,在并联机械手前端动平台102上可安装各类的农业器械,再通过视觉导航系统101来识别和定位作业对象,可实现花粉(药)采集与授粉、修剪、采摘、割草(灌)、开穴、起
苗、栽种、松土、开沟、施肥以及作物及设备运输等工作,在智能控制系统操作下实现多功能、自动化、智能化、集约化的生产作业,对提高果园、林地及丘陵山地的作业功能与作业效率有着积极的作用。
32.以上实施利用以说明本发明的技术方案而非限制,本领域技术人员应当理解,凡在本发明的精神和原则之内,对本发明的技术方案所做的任何修改、等同替换或改进等,均包含在本发明的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1