一种轻量级的桌面多轴机械臂及其机械臂的底座的制作方法
1.本发明涉及机械臂技术领域,尤其涉及一种轻量级的桌面多轴机械臂及其机械臂的底座。
背景技术:
2.工业机器人是面向工业领域的多关节机械手或多自由度的机器装置,它能自动执行工作,是靠自身动力和控制能力来实现各种功能的一种机器,它可以接受人类指挥,也可以按照预先编排的程序运行,现代的工业机器人还可以根据人工智能技术制定的原则纲领行动,自动化程度较高。
3.但是现有的机械臂在长时间运作后需要定期进行维护保养,费时费力且影响加工效率,同时在进行数控加工时机械臂大范围运动导致冷却液等导管易造成缠绕堵塞,造成机械超温的问题。
4.所以设计一款具有内部传输且自动上润滑油的机械臂是迫切需要的。
技术实现要素:
5.为解决上述技术问题,本发明提供一种轻量级的桌面多轴机械臂及其机械臂的底座,以解决机械臂在长时间运作后需要定期进行维护保养,费时费力且影响加工效率,同时在进行数控加工时机械臂大范围运动导致冷却液等导管易造成缠绕堵塞,造成机械超温的问题。
6.本发明一种轻量级的桌面多轴机械臂及其机械臂的底座的目的与功效,由以下具体技术手段达成:一种轻量级的桌面多轴机械臂及其机械臂的底座,包括底座、基座、机械臂,所述底座底部四角处固定连接有用于支撑整体结构的支脚,且底座四周侧壁上开设有连接槽,同时连接槽上下两端内壁中开设有限位槽,所述底座内部开设有用于存储液体的中空腔体,且中空腔体四周内壁上转动连接有延伸至连接槽内部的传输轴,所述基座活动连接于连接槽内部,且基座靠近连接槽的一端与传输轴啮合,同时机械臂转动连接于基座顶部。
7.其中,所述传输轴轴身上开设活动槽,且活动槽开设有多个并环绕传输轴轴身一周,同时活动槽中活动连接有具有自回位的传输板,所述传输板内部中心开设有前后贯穿的传输槽,且传输板两端板身上设有开合组件。
8.其中,所述开合组件包括导轮、密封板,所述导轮转动连接于传输板内壁中,且导轮一端轴心处固定连接有连接轴,同时密封板设立于导轮之间的传输槽中,并且密封板为可伸缩设置,所述连接轴顶端设有螺纹,且连接轴顶端啮合连接有延伸至另一端开合组件中的传动轴,同时连接轴轴身上缠绕连接有拉索,并且拉索延伸至密封板内部。
9.其中,所述基座内部呈空心结构,且基座上下两端外侧内壁上开设有轮槽,同时基座内部外侧固定连接有电机,并且电机输出端固定连接有延伸至轮槽外的行动轮,所述基座内部外侧转动连接有延伸至基座外并与传动轴啮合的传输管,且传输管管身与行动轮平
齐处固定连接有啮合环,同时传输管内部固定连接有风扇,并且传输管的末端与机械臂导通连接。
10.其中,所述啮合环中心开设有与传输管连接的连接口,且啮合环内部开设有安装槽,同时安装槽内部嵌入有电控的气囊,所述啮合环外壁中活动连接有接触板,且接触板内侧板身上固定连接有顶杆。
11.其中,所述机械臂包括底板、臂杆,所述底板内部呈空心结构,且底板顶部转动连接有延伸至底板顶部外的转轴,同时转轴底部轴身上开设有驱动槽,并且底板内壁中嵌入有与驱动槽啮合的驱动电机,所述传输管贯穿连接至底板内部,所述臂杆竖向贯穿连接至转轴底部并进入底板内部,且臂杆内部开设有贯穿臂杆底部的内置管道,同时臂杆位于底板内部中的内置管道中固定连接有抽吸泵,并且臂杆顶部固定连接有安装座。
12.其中,所述安装座顶部两端固定连接有支撑板,且支撑板中上段板身上开设有通孔,同时通孔中转动连接有插轴,并且支撑板之间通过插轴活动连接有活动臂,所述安装座内部两侧开设有转输腔和附属腔,且传输腔底部内侧固定连接有延伸至内置管道内部的导管,同时附属腔中存储有用于润滑的油脂,所述臂杆杆身外部固定连接有驱动泵,且驱动泵的顶端与活动臂之间通过转轴连接。
13.其中,所述插轴内部开设有中空腔体,且插轴外侧端固定连接有连接轴座,同时插轴轴身外壁上开设有多个单向向外导通的传输孔,并且连接轴座外侧贯穿连接有导管,所述导管的一端延伸至插轴内部,另一端延伸至转输腔内部,且导管中固定连接有抽吸扇,同时插轴远离连接轴座的一端轴身底部啮合连接有涂覆轮。
14.其中,所述涂覆轮设立于支撑板内部,且涂覆轮两端固定连接有轴承座,同时轴承座外部固定连接有连接轴板,并且连接轴板固定连接于支撑板内顶部,所述涂覆轮内部呈空心结构,且涂覆轮两端轴身导通连接有导管,同时导管中设有抽吸扇,并且导管末端延伸至附属腔内部。
15.其中,所述活动臂内部开设有内置管道,且活动臂末端臂身上开设有与插轴连接的连接孔,同时连接孔内壁上嵌入有与传输孔对位的导通阀,并且导通阀为单向向内导通设置。
16.有益效果:(1)通过设有底座,利用连接槽内部的传输轴与传输管接触时将传输板向内侧顶动,从而利用导轮与活动槽内壁接触旋转带动连接轴收缩拉索,使得密封板开启将底座内部的液体传输至传输管中,实现底座内部液体密封传输的效果。
17.(2)铜锁设有传输管,利用传输管杆身上的啮合环,在抽吸泵出现故障无法提供吸力时,通过啮合环中的气囊将接触板顶出与行动轮啮合,使在行动轮移动时将带动传输管整体旋转,并且利用传输管内部的风扇产生抽吸力将底座内部的液体吸入其内部,实现提供应急提供抽吸力的效果。
18.(3)通过设有插轴,利用抽吸泵将位于底板内部中的液体输送至插轴内部,并且利用插轴外壁上的传输孔与导通阀对位将液体传输至活动臂中,实现臂杆与活动臂之间形成输送线路的效果。
19.(4)通过设有涂覆轮,利用插轴旋转时带动涂覆轮旋转,使涂覆轮两端导管一同旋转,此时导管中的抽吸扇将产生吸力将附属腔中的润滑油脂传输至涂覆轮内部,同时利用
涂覆层对插轴进行涂抹润滑油脂,实现在机械运作时自动进行润滑的效果。
附图说明
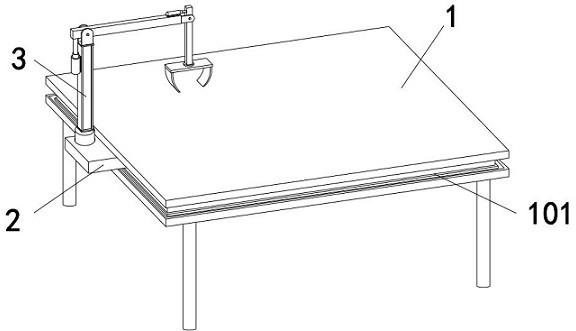
20.图1为本发明整体结构示意图。
21.图2为本发明底座剖面结构示意图。
22.图3为本发明传输轴结构示意图。
23.图4为本发明传输轴剖面结构示意图。
24.图5为本发明图4中a处放大结构示意图。
25.图6为本发明基座拆解结构示意图。
26.图7为本发明传输管剖面结构示意图。
27.图8为本发明啮合环拆解结构示意图。
28.图9为本发明机械臂结构示意图。
29.图10为本发明机械臂局部剖面结构示意图。
30.图11为本发明安装座剖面结构示意图。
31.图12为本发明图11中b处放大结构示意图。
32.图13为本发明插销剖面结构示意图。
33.图14为本发明活动臂局部剖面结构示意图。
34.图1-14中,部件名称与附图编号的对应关系为:1-底座、101-连接槽、102-限位槽、103-传输轴、104-活动槽、105-传输板、106-传输槽、107-开合组件、108-导轮、109-连接轴、110-传动轴、111-密封板、112-拉索、2-基座、201-轮槽、202-电机、203-行动轮、204-传输管、205-啮合环、206-连接头、207-风扇、208-连接口、209-安装槽、210-气囊、211-接触板、212-顶杆、3-机械臂、301-底板、302-转轴、303-臂杆、304-驱动泵、305-安装座、306-插轴、307-活动臂、308-机械爪、309-驱动电机、310-驱动槽、311-抽吸泵、312-内置管道、313-转输腔、314-附属腔、315-支撑板、316-连接轴板、317-涂覆轮、318-轴承座、319-涂覆层、320-连接轴座、321-传输孔、322-连接孔、323-导通阀。
具体实施方式
35.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整的描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例,基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
36.实施例一:如附图1至附图6所示:首先,控制电机202工作带动行动轮203旋转,此时,行动轮203将与限位槽102内壁接触,从而带动基座1沿底座1四周移动,并且在行动轮203与限位槽102连接的情况下将保持基座2与底座1之间的稳定,同时,在基座2移动时其内部的传输管204将与传输轴103接触。
37.当传输轴103与传输管204接触时,传输轴103轴身上的传输板105将向活动槽104
内部移动,此时,传输板105上开合组件107中的导轮108将与活动槽104内壁接触并旋转,并且导轮108旋转时将连通连接轴109一同旋转,连接轴109利用传输轴110带动另一端开合组件107中的导轮108旋转,同时,连接轴109在旋转时将拉索112缠绕在其轴身上,从而将拉索112顶端连接的密封板111开启,使得传输板105内部的传输槽106形成通路,将底座1内部的液体导入传输管204中。
38.实施例二:如附图6至附图10所示:在传输管204中有液体导入后,通过控制臂杆303中的抽吸泵功311工作,将对底板301内形成负压,使得传输管204中的液体进入底板301内部,此时,传输管204其内部的风扇207将在水流的作用下旋转,从而带动传输管204整体旋转,同时,导入底板301中的液体最终将进入臂杆303内部的内置管道312中。
39.当抽吸泵311发生故障无法工作产生抽吸力时,控制啮合环205中的气囊210膨胀,使得接触板211在顶杆212的顶动下伸出啮合环205并与行动轮203接触并旋转,从而利用传输管204内部的风扇207产生抽吸力将液体传输至底板301内部。同理,当电机202故障无法驱动行动轮203旋转使得基座2移动时,也可按照上述方式利用抽吸泵311带动传输管204旋转,并配合啮合环205带动行动轮203旋转,达到双重驱动模式,以防单机械故障造成整体无法运作的效果。
40.实施例三:如附图11至附图14所示:当臂杆303内部有液体导入时,液体将沿内置管道312进入安装座305内部的转输腔313中,并通过管道进入插轴306内部,此时,随着插轴306内部的压力上升,其内部的液体将通过传输孔321喷入与其对位设置的导通阀323内,最终传输至活动臂307内。
41.在活动臂307活动时将带动插轴306转动,从而使得与插轴306一端啮合的涂覆轮317旋转,此时,位于涂覆轮317两侧的轴承座318将一同旋转,并且其内部的抽吸扇将转动产生抽吸力将存储在附属腔313中的润滑油脂抽入涂覆轮317内,同时,涂覆轮317内部的润滑油脂将通过涂覆层319渗透至插轴306上,实现对插轴306与活动臂307连接端进行润滑的效果。
42.工作原理:首先,控制电机202工作带动行动轮203旋转,带动基座1沿底座1四周移动,且在基座2移动时其内部的传输管204将与传输轴103接触,当传输轴103与传输管204接触时,传输轴103轴身上的传输板105将向活动槽104内部移动,此时,传输板105上开合组件107中的导轮108将与活动槽104内壁接触带动内部传动结构使得传输板105内部的传输槽106形成通路,将底座1内部的液体导入传输管204中。
43.在传输管204中有液体导入后,通过控制臂杆303中的抽吸泵功311工作,将对底板301内形成负压,使得传输管204中的液体进入底板301内部,此时,传输管204其内部的风扇207将在水流的作用下旋转,从而带动传输管204整体旋转,同时,导入底板301中的液体最终将进入臂杆303内部的内置管道312中。
44.当臂杆303内部有液体导入时,液体将沿内置管道312进入安装座305内部的转输腔313中,并通过管道进入插轴306内部,此时,随着插轴306内部的压力上升,其内部的液体将通过传输孔321喷入与其对位设置的导通阀323内,最终通过活动臂307传输至机械爪308
端喷出,在活动臂307活动时将带动插轴306转动,从而使得与插轴306一端啮合的涂覆轮317旋转,此时,位于涂覆轮317两侧的轴承座318将一同旋转,并且其内部的抽吸扇将转动产生抽吸力将存储在附属腔313中的润滑油脂抽入涂覆轮317内,同时,涂覆轮317内部的润滑油脂将通过涂覆层319渗透至插轴306上,实现对插轴306与活动臂307连接端进行润滑的效果。
45.当抽吸泵311发生故障无法工作产生抽吸力时,控制啮合环205中的气囊210膨胀,使得接触板211在顶杆212的顶动下伸出啮合环205并与行动轮203接触并旋转,从而利用传输管204内部的风扇207产生抽吸力将液体传输至底板301内部。同理,当电机202故障无法驱动行动轮203旋转使得基座2移动时,也可按照上述方式利用抽吸泵311带动传输管204旋转,并配合啮合环205带动行动轮203旋转,达到双重驱动模式,以防单机械故障造成整体无法运作的效果。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1