一种仿生机械手
1.本发明涉及机械手技术领域,具体涉及一种仿生机械手。
背景技术:
2.近年来,软体机械手受到研究人员的广泛的关注,与传统的刚性机器人相比,软体机械手通常由柔软或可扩展的材料制成,在工作时会出现较大的变形,它规避了刚性机械手的缺陷,具有灵巧性、安全性、可延展性、抗冲击性、可操纵性等优点,并以其灵活的运动能力和对环境的适应能力,在抓取易碎物体、勘测复杂地形和参与救灾救险等方面具有显著优势,在医疗、考古、仿生等领域具有更广阔的应用前景。
3.目前软体机械手主要是依靠软体硅胶材料来制作,手指多呈现为多气腔结构,在输入气压之后,发生弯曲变形达到抓取物体的效果,如专利号为cn202110254335.6(公开号为cn112809720a)的中国发明专利申请公开的《一种软体机械手》,包括:仿生手掌,具有掌心面、端面和侧面;仿生手指机构,包括:连接于端面的第一手指单元、第二手指单元;连接于侧面的拇指单元,第一手指单元在背离掌心面的表面上纵向间隔设置有多个第一气腔,第二手指单元在背离掌心面的表面上纵向间隔设置有多个第二气腔,拇指单元在背离掌心面的表面上横向间隔设置有左气腔和右气腔;气动控制机构,包括:气泵;连接于气泵与仿生手指机构之间的第一开关机构,用于独立控制向每个第一气腔、每个第二气腔、左气腔和右气腔供压;用于独立控制每个第一气腔、每个第二气腔、左气腔和右气腔泄压的第二开关机构。
4.该机械手模仿人手的大致形状,但是手指运动的形式单一,手指在弯曲时始终平行,包络物体的范围有限,且手掌在实现抓取、捏握等功能时始终处于同一平面,在抓取球状或不规则物体时不具有适配性,缺乏灵活性和适配性,难以实现模拟人手的复杂功能。
技术实现要素:
5.本发明所要解决的技术问题是针对现有技术的现状,提供一种对于球状物体或形状不规则物体具有更大的适应性与包络性的仿生机械手。
6.本发明解决上述技术问题所采用的技术方案为:一种仿生机械手,包括手掌和安装在手掌上的手指,其特征在于,所述手指包括第一手指和第二手指,所述手掌包括第一掌板和第二掌板,所述第一掌板和第二掌板均具有掌心面、位于掌心面两端的端面以及位于掌心面两侧的侧面,所述第二掌板位于第一掌板的其中一个端面侧,且第一掌板的掌心面和第二掌心的掌心面之间形成预设角度的夹角,所述第一手指的指根安装在第一掌板的掌心面上,第二手指的指根安装在第二掌板的远离第一掌板的端面上。
7.为了进一步提高机械手的抓取稳定性,所述第二掌板包括沿第一掌板的端面的长度方向并排设置的两个板体,每个板体的端面上设有至少一根第二手指,将第二掌板的两个端面之间的延伸方向定义为第一方向,两个板体通过沿第一方向延伸的第一转轴与第一掌板转动相连,从而使两个板体的掌心面能靠拢或者远离。这样两个板体可以转动至不同
的平面,同时使得两个板体上的第二手指处于不同的平面,进一步提高机械手对物体的适配性和包络性,抓取稳定性更高。
8.为了便于板体和第二掌板转动相连,所述第一掌板上设有插设在两个板体之间的安装板,所述安装板上设有两端分别朝着两个板体的连接条,两个板体均通过所述第一转轴与连接条转动相连;
9.可以手动转动板体,但是这样不够自动化,故所述仿生机械手还包括用于驱动板体转动的第一驱动机构。
10.所述第一驱动机构可以有多种结构形式,优选地,所述安装板上还设有两端分别朝着两个板体的安装条,所述板体上设有第三安装部,所述第一驱动机构包括
11.第一滑块,滑动设置在第三安装部上,第一滑块能够朝远离或者靠近安装板的方向移动;
12.第一驱动件,与第一滑块通过沿第一方向延伸的第六转轴转动相连,
13.第一活塞杆,一端安装在第一驱动件上并与第一驱动件驱动相连,所述第一活塞杆的另一端通过沿第一方向延伸的第二转轴与安装条的对应端部转动相连,所述第一活塞杆能沿其轴向往复移动。第一驱动件工作,使得第一活塞杆伸缩,在第一活塞杆伸缩的过程中,会相对于安装条转动,进而使得第一滑块滑动以及板体转动。
14.为了进一步提高机械手的抓取稳定性,将沿板体的端面的宽度方向延伸的方向定义为第三方向,所述第二手指通过沿第三方向延伸的第四转轴与板体转动相连,从而使第二手指能够朝板体的侧面转动,第二手指之间具有夹角,抓取各类物体时更具有包络性,适配性。
15.为了便于第二手指转动安装在板体上,所述第二手指的指根设有第二安装部,所述板体的端面上设有第二安装座,所述第二安装部和第二安装座之间通过所述第四转轴转动相连;
16.为了便于驱动第二手指相对于板体转动,所述板体的端面上还设有用于驱动第二安装座相对于第二安装座转动的第三驱动机构。
17.所述第三驱动机构可以有多种结构形式,优选地,所述第三驱动机构包括
18.第三滑块,滑动安装在板体端面上,所述第三滑块能够朝靠近或者远离第二安装座的方向移动;
19.第三驱动件,通过沿第三方向延伸的第五转轴转动安装在第三滑块上;
20.第三活塞杆,一端安装在第三驱动件上并与第三驱动件驱动相连,所述第三活塞杆的另一端与第二安装部固定相连,所述第三活塞杆能沿其轴向往复移动。第三驱动件工作,使得第三活塞杆伸缩,在第三活塞杆伸缩的过程中,第三驱动件会相对于第三滑块转动,且第三滑块会移动,从而使得第二安装部带动第二手指转动。
21.为了进一步提高抓取稳定性,所述手指还包括第三手指,所述第一掌板上设有插设在两个板体之间的安装板,所述安装板的端面固定设有第三手指。这样机械手与物体的接触面积更大,抓取稳定性更高。
22.优选地,所述第二手指有两根,分别设置在两个板体上,所述第一手指、第三手指分别有一根。四根手指即能实现人手的基本功能,同时又简化了结构。
23.为了进一步提高机械手对物体的抓取稳定性,将第一掌板的两个端面之间的延伸
方向定义为第二方向,所述第一手指与第一掌板通过沿第二方向延伸的第三转轴转动相连,从而使第一手指能够朝手掌的侧面转动。这样可以根据物体的尺寸来适当调整第一手指的位置,达到最好的抓取、捏握的效果。
24.为了便于第一手指和第一掌板转动相连,所述第一掌板上设有第一安装座,所述第一手指的指根设有第一安装部,所述第一安装部通过所述第三转轴与第一安装座转动相连;
25.为了便于驱动第一手指转动,所述第一掌板上还设有用于驱动第一安装部相对于第一安装座转动的第二驱动机构。
26.所述第二驱动机构可以有多种结构形式,优选地,所述第二驱动机构包括
27.第二滑块,滑动安装在第一掌板上,所述第二滑块能够朝靠近或者远离第一安装座的方向移动;
28.第二驱动件,通过沿第二方向延伸的第七转轴转动安装在第二滑块上;
29.第二活塞杆,一端安装在第二驱动件并与第二驱动件驱动相连,所述第二活塞杆的另一端与第一安装部固定相连,所述第二活塞杆能沿其轴向往复移动。第二驱动件工作,使得第二活塞杆伸缩,在第二活塞杆伸缩的过程中,第二驱动件会相对于第二滑块转动,且第二滑块会移动,从而使得第一安装部带动第二手指转动。
30.为了进一步提高手指对物体的抓取稳定性,每个所述手指均包括能够使手指朝第二掌板的掌心面的方向弯曲的弯曲结构。这样能够进一步提高手指与球状物体的接触面积,抓取更稳定。
31.可以将弯曲结构设计呈由多根关节铰接的结构,以实现手指的弯曲,为了使得手指能够弯曲且不易损伤待抓取的物体,优选地,所述弯曲结构为能够弯曲变形的柔性件,所述柔性件的背向第二掌板的掌心面的第一侧壁上沿其长度方向间隔设有多个隔槽,从而将柔性件分成多个单元,各所述单元均内部中空,且各所述单元相连通,所述柔性件上开设有与端部的单元相连通的进气孔。通过向柔性件内充气,因为隔槽的设置,柔性件在气压的作用下膨胀后会弯曲变形。
32.因为柔性件为柔性材质,会导致抓取力度不够,故优选的,所述柔性件中设有铰链结构,且该铰链结构沿柔性件的长度方向延伸,所述铰链结构靠近柔性件的朝向第二掌板的掌心面的第二侧壁设置。铰链结构可以采用硬性材质,如塑料件,既不会影响柔性件的弯曲,又保证了手指的整体刚度,这样各个手指在抓握的过程具有抵抗横向侧弯的作用,且在抓取过程中,与物体接触更具有贴合力,提高抓取物体的精确性和包络性。
33.为了使得手指具有最大的弯曲角度,所述铰链结构包括多个沿柔性件长度方向依次铰接的链节,相邻两个链节之间通过枢轴相连,且所述枢轴的轴线沿第二侧壁的宽度方向延伸,所述枢轴对应隔槽设置,这样铰链结构不会对柔性件的弯曲产生干涉,使得柔性件能弯曲至最大角度,与球状物体或者不规则物体具有尽可能大的接触面积。
34.与现有技术相比,本发明的优点:本发明通过将手掌分体设计成第一掌板和第二掌板,且第一掌板和第二掌板的掌心面之间具有夹角,第一掌板上设有第一手指,第二掌板上设有第二手指,这样在抓取物体时,第一掌板和第二掌板处于不同的平面,相对于手掌的掌心面处于同一平面的方式,本发明的手掌与球状物体或者不规则物体的接触面积更大,会对物体的适配性和包络性更好,对物体的抓取稳定性更高。
附图说明
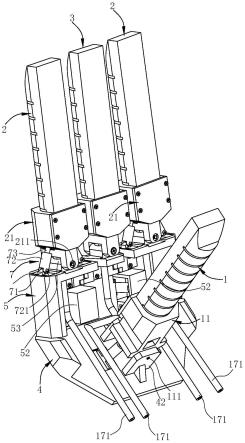
35.图1为本发明实施例的结构示意图;
36.图2为图1的另一方向的结构示意图;
37.图3为图1的去掉第一手指的结构示意图;
38.图4为图3的另一方向的结构示意图;
39.图5为图4的剖视图;
40.图6为图4的分解示意图;
41.图7为其中一根手指的结构示意图;
42.图8为图7的剖视图;
43.图9为图7中的铰链结构的结构示意图;
44.图10为在气压40kpa下手指的弯曲状态示意图。
具体实施方式
45.以下结合附图实施例对本发明作进一步详细描述。
46.如图1~10所示,本优选实施例的仿生机械手包括手掌和安装在手掌上的手指。
47.手指包括第一手指1、第二手指2和第三手指3,手掌包括第一掌板4和第二掌板5,第一掌板4和第二掌板5均具有掌心面、位于掌心面两端的端面以及位于掌心面两侧的侧面,第二掌板5位于第一掌板4的其中一个端面侧,且第一掌板4的掌心面和第二掌心的掌心面之间形成预设角度的夹角,该夹角最好在120
°
至160
°
之间,较佳地,为140
°
。第一手指1的指根安装在第一掌板4的掌心面上,第二手指2的指根安装在第二掌板5的远离第一掌板4的端面上。
48.因为第一掌板4和第二掌板5的掌心面之间具有夹角,第一掌板4和第二掌板5处于不同的平面,相对于手掌的掌心面处于同一平面的方式,本实施例的手掌与球状物体或者不规则物体的接触面积更大,会对物体的适配性和包络性更好,对物体的抓取稳定性更高。
49.本实施例的机械手具有多个活动自由度:
50.如图4、5所示,本实施例中,第二掌板5包括沿第一掌板4的端面的长度方向并排设置的两个板体51,每个板体51的端面上设有至少一根第二手指2,将第二掌板5的两个端面之间的延伸方向定义为第一方向,两个板体51通过沿第一方向延伸的第一转轴511与第一掌板4转动相连,从而使两个板体51的掌心面能靠拢或者远离。
51.具体为:第一掌板4上设有插设在两个板体51之间的安装板41,安装板41上设有两端分别朝着两个板体51的连接条42,两个板体51均通过第一转轴511与连接条42转动相连,每个板体51上均设有第三安装部52,第三安装部52上设有用于驱动板体51转动的第一驱动机构6。
52.第一驱动机构6包括第一滑块61、第一驱动件62和第一活塞杆63,第一滑块61滑动设置在第三安装部52上,第一滑块61能够朝远离或者靠近安装板41的方向移动,第一驱动件62与第一滑块61通过沿第一方向延伸的第六转轴621转动相连。
53.安装板41上设有两端分别朝着两个板体51的安装条43,第一活塞杆63一端安装在第一驱动件62上并与第一驱动件62驱动相连,第一活塞杆63的另一端通过沿第一方向延伸的第二转轴631与安装条43的对应端部转动相连,第一活塞杆63能沿其轴向往复移动。
54.第一驱动件62工作,使得第一活塞杆63伸缩,在第一活塞杆63伸缩的过程中,会相对于安装条43转动,进而使得第一滑块61滑动以及板体51绕第一转轴511转动,这样两个板体51可以转动至不同的平面,同时使得两个板体51上的第二手指2处于不同的平面,进一步提高机械手对物体的适配性和包络性,抓取稳定性更高。
55.如图3、4所示,第二手指2的指根设有第二安装部21,板体51的端面上设有第二安装座53,第二安装部21和第二安装座53之间通过第四转轴211转动相连,将沿板体51的端面的宽度方向延伸的方向定义为第三方向,第四转轴211沿第三方向延伸。
56.板体51的端面上还设有用于驱动第二安装座53相对于第二安装座53转动的第三驱动机构7。第三驱动机构7包括第三滑块71、第三驱动件72和第三活塞杆73,第三滑块71滑动安装在板体51端面上,板体51端面上设有供第三滑块71滑动的第二滑槽511,第三滑块71能够朝靠近或者远离第二安装座53的方向移动,第三驱动件72通过沿第三方向延伸的第五转轴721转动安装在第三滑块71上。
57.第三活塞杆73一端安装在第三驱动件72上并与第三驱动件72驱动相连,第三活塞杆73的另一端与第二安装部21固定相连,第三活塞杆73能沿其轴向往复移动。
58.第三驱动件72工作,使得第三活塞杆73伸缩,在第三活塞杆73伸缩的过程中,第三驱动件72会相对于第三滑块71转动,且第三滑块71会移动,从而使得第二安装部21带动第二手指2转动,以使第二手指2能够朝板体51的侧面转动,第二手指2之间夹角,抓取各类物体时更具有包络性,适配性。
59.本实施例中,一根第二手指2对应的第三驱动机构7有两套,分别设置在第二手指2的两侧,以更好的推动第二手指2朝手掌的两个侧面转动。
60.如图1、2所示,第一掌板4上设有第一安装座42,第一手指1的指根设有第一安装部11,第一安装部11通过第三转轴111与第一安装座42转动相连,将第一掌板4的两个端面之间的延伸方向定义为第二方向,第三转轴111沿第二方向延伸。
61.第一掌板4上还设有用于驱动第一安装部11相对于第一安装座42转动的第二驱动机构8。本实施例中,第一手指1对应的第二驱动机构8有两套,分别设置在第一手指1的两侧,以更好的推动第一手指1朝手掌的两个侧面转动。
62.第二驱动机构8包括第二滑块81、第二驱动件82、第二活塞杆83,第二滑块81滑动安装在第一掌板4上,第一掌板4上开设有供第二滑块81在其内滑动的第二滑槽44,第二滑块81能够朝靠近或者远离第一安装座42的方向移动,第二驱动件82通过沿第二方向延伸的第七转轴821转动安装在第二滑块81上。
63.第二活塞杆83一端安装在第二驱动件82并与第二驱动件82驱动相连,第二活塞杆83的另一端与第一安装部11固定相连,第二活塞杆83能沿其轴向往复移动。
64.第二驱动件82工作,使得第二活塞杆83伸缩,在第二活塞杆83伸缩的过程中,第二驱动件82会相对于第二滑块81转动,且第二滑块81会移动,从而使得第一安装部11带动第二手指2转动,以使第一手指1能够朝手掌的侧面转动,这样可以根据物体的尺寸来适当调整第一手指1的位置,达到最好的抓取、捏握的效果。
65.安装板41的端面固定设有一根第三手指3,第一手指1有一根,转动设置在第一掌板4上,第二手指2有两根,分别转动设置在两个板体51上。
66.如图7~10所示,上述手指包括能使其朝第二掌板5的掌心面的方向弯曲的弯曲结
构。弯曲结构为能够弯曲变形的柔性件12,柔性件12可采用硅胶或者橡胶材质,柔性件12的背向第二掌板5的掌心面的第一侧壁13上沿其长度方向间隔设有多个隔槽14,从而将柔性件12分成多个单元15,各单元15均内部中空,且各单元15通过通气孔16相连通,柔性件12上开设有与端部的单元15相连通的进气孔17,进气孔17处连接有进气管171。通过向柔性件12内充气,因为隔槽14的设置,柔性件12在气压的作用下膨胀后会弯曲变形,如图10所示。
67.柔性件12中设有铰链结构9,且该铰链结构9沿柔性件12的长度方向延伸,铰链结构9靠近柔性件12的朝向第二掌板5的掌心面的第二侧壁18设置。因为柔性件12为柔性材质,会导致抓取力度不够,故铰链结构9可以采用硬性材质,如塑料件,既不会影响柔性件12的弯曲,又保证了手指的整体刚度。
68.如图8、9所示,本实施例中,铰链结构9包括多个沿柔性件12长度方向依次铰接的链节91,每一所述链节91均包括基板911,相邻两个链节91中,其中一个链节91的基板上开设有凹槽9111,另一个链节91的基板911上开设有能容置于凹槽9111中的凸块9112,枢轴92穿过凹槽9111和凸块9112将相邻两个链节91转动相连,且枢轴92的轴线沿第二侧壁18的宽度方向延伸,枢轴92对应隔槽14设置,这样铰链结构9不会对柔性件12的弯曲产生干涉,使得柔性件12能弯曲至最大角度,与球状物体或者不规则物体具有尽可能大的接触面积,抓取更稳定。
69.由上可知,本实施例的第二掌板5的两个板体51能够相对转动,第一手指1能够朝第一掌板4的两个侧面转动,第二手指2能够朝第二掌板5的两个侧面转动,上述第一驱动件62、第二驱动件82、第三驱动件72均可以采用电机或者气缸。
70.在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”、“顺时针”、“逆时针”、“轴向”、“径向”、“周向”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,由于本发明所公开的实施例可以按照不同的方向设置,所以这些表示方向的术语只是作为说明而不应视作为限制,比如“上”、“下”并不一定被限定为与重力方向相反或一致的方向。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1