料箱内无序摆放工件的自动抓取抓手及方法与流程
1.本发明涉及自动抓件领域,具体涉及一种料箱内无序摆放工件的自动抓取抓手及方法。
背景技术:
2.随着视觉检测技术的不断发展,自动抓件已成为工业中将工件移动到指定位置的一种常见方式。自动抓件的抓手通常为磁铁或者吸盘,抓件时要求工件表面与磁铁或吸盘表面贴合。实际生产过程中,若工件尺寸较大,单层或有规律的摆放在料箱内,则磁铁或吸盘表面易于与工件表面相贴合,顺利完成抓件;若工件尺寸相较料箱较小,特别是窄长的工件,其往往无序摆放在料箱内,常规的固定抓取姿态,或者经视觉引导技术修正后的机器人抓取姿态,均无法避免抓手进入料箱时与料箱壁干涉的情况,导致工件无法抓取。
3.鉴于料箱内工件无序摆放在自动抓件过程中存在的问题,现有自动抓件方法应用受限,使用时需要与皮带传送相结合。对于不能在料箱内规则排列的工件或表面为复杂曲面的工件,不能应用。
技术实现要素:
4.为了解决上述技术问题,本发明提供一种料箱内无序摆放工件的自动抓取抓手及方法,其结合特殊结构的抓手,保证抓手进出料箱时都是垂直向下或向上的方式,最大程度的避免了抓手与料箱壁的干涉,有效提升抓取成功率。
5.为此,本发明的技术方案如下:
6.一种料箱内无序摆放工件的自动抓取抓手,其特征在于包括:法兰、支撑架、第一杆件、旋转机构、第一摆动机构和第二摆动机构;
7.所述法兰与机器人末端法兰相连,其通过支撑架连接在第一杆件的一端,第一杆件的轴线与机器人末端法兰表面呈20~45
°
;所述第一杆件的另一端连接旋转机构;
8.所述旋转机构包括旋转台和第一电机;所述旋转台固定在第一杆件上;所述第一电机带动所述旋转台沿第一杆件的轴线转动角度α;
9.所述第一摆动机构包括t形连接架、第二电机和变向连接件;所述t形连接架固定在旋转台上,能随所述旋转台同步转动;所述第二电机穿过设置于t形连接架上的通孔,与变向连接件相连;第二电机带动变向连接件按照预设角度摆动角度β;所述变向连接件为相互垂直的两段,第一段上设第一通孔,连接在第二电机的力输出端,第二段上设第二通孔,第二通孔的中心线与第一通孔的中心线在空间中垂直;所述角度β为变向连接件的中心线与第一杆件轴线的夹角;
10.所述第二摆动机构包括立板、第二杆件和第三电机;所述第二杆件的中间垂直方向上形成有立板;所述第三电机的力输出端穿过变向连接件的第二段与所述立板相连,第三电机能通过立板带动第二杆件摆动至角度γ;所述第二杆件远离立板的一侧设有一个、两个或多个磁铁或吸盘,用于实现工件的抓取。
11.进一步,为了保证抓件时机器人的运动不会被料箱壁干涉,所述自动抓取抓手的长度大于等于料箱的高度。
12.进一步,角度α的取值范围为0~360
°
;角度β的取值范围为-90
°
~90
°
;角度γ的取值范围为-90
°
~90
°
。
13.进一步,所述第一电机、第二电机和第三电机分别连接有减速器。
14.利用如上所述自动抓取抓手对料箱内无序摆放工件进行抓取的方法:此处的抓手指磁铁或者吸盘;
15.记待抓取工件在抓取过程中与磁铁或吸盘相贴合的面为面i;
16.料箱位置的上方固定安装有点云传感器,用于获取待抓取工件面i的点云图像;
17.以料箱的底面为xy面,以料箱高度方向为z轴,构建标准坐标系;
18.抓取过程步骤如下:
19.1)点云传感器扫描料箱内的工件,获取待抓取工件面i的点云图像,以面i及其法线方向建立坐标系i;
20.求取标准坐标系与坐标系i之间的旋转关系r;
21.2)基于面i所在位置距料箱顶部的距离确定抓取过渡点,并将其传输至机器人,末端连接有上所述自动抓取抓手的机器人,运动到抓取过渡点;
22.在抓取过渡点,机器人固定在料箱上方,自动抓取抓手调整位姿令磁铁或吸盘的表面与所述面i平行;
23.3)机器人带动所述自动抓取抓手垂直向下运动至抓取位,第二杆件上设置的磁铁或者吸盘贴合面i,抓取工件,机器人带动所述自动抓取抓手垂直向上至抓取过渡点,再离开料箱,完成抓取。
24.进一步,步骤2)自动抓取抓手调整位姿令磁铁或吸盘的表面与所述面i平行的方法为:
25.基于标准坐标系与坐标系i之间的旋转关系r,分别求取x、y、z的转向角,获取角度α、角度β及角度γ;
26.继而,第一驱动电机带动所述转盘沿第一杆件的轴线转动角度α;
27.第二驱动电机带动变向连接件摆动至角度β;
28.第三驱动电机带动第二杆件摆动至角度γ。
29.更进一步,采用如下欧拉公式获取角度α、角度β及角度γ:
[0030][0031]
其中:r(α,β,γ)代表用(α,β,γ)表示标准坐标系与坐标系i之间的旋转关系r。
[0032]
进一步,构建标准坐标系时,以料箱的长边为x轴,短边为y轴;
[0033]
对应的,建立坐标系i时,面i的长边为x轴,短边为y轴。
[0034]
本发明提供的料箱内无序摆放工件的自动抓取抓手及方法,其结合旋转机构和两个摆动机构实现了抓手与待抓取工件表面贴合的可能性,继而使机器人在不进入料箱的情况下,垂直上下,最大限度的减少了料箱壁对机器人运动轨迹的干涉;除了个别紧贴料箱壁的不能完成自动抓件外,其余均可实现成功抓取,将抓取的成功性至少提升90%。另一方
面,因机器人减少了进入料箱内的轨迹,有效降低了对机器人轨迹规划的要求。
附图说明
[0035]
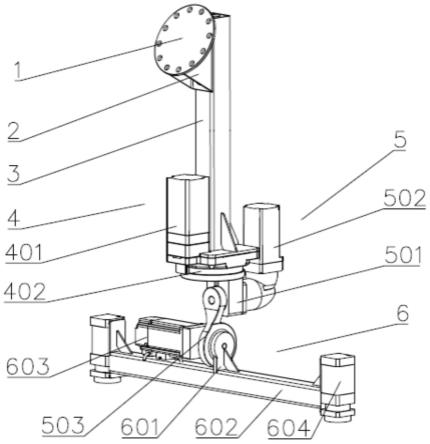
图1为本发明提供的料箱内无序摆放工件的自动抓取抓手的结构示意图;
[0036]
图2为本发明提供的料箱内无序摆放工件的自动抓取抓手的使用状态图。
具体实施方式
[0037]
以下结合附图和具体实施方式对本发明的技术方案进行详细描述。
[0038]
如图1所示,一种料箱内无序摆放工件的自动抓取抓手,此处的抓手指磁铁或者吸盘;包括:法兰1、支撑架2、第一杆件3、旋转机构4、第一摆动机构5和第二摆动机构6;
[0039]
法兰1与机器人末端法兰相连,其通过支撑架2连接在第一杆件3的一端,第一杆件3的轴线与机器人末端法兰表面呈20~45
°
;第一杆件3的另一端连接旋转机构4;
[0040]
旋转机构4包括旋转台402和第一电机401;旋转台402固定在第一杆件3上;第一电机401带动旋转台402沿第一杆件3的轴线转动角度α;具体来说,角度α的取值范围为0~360
°
;第一电机401连接有减速器;减速器的选型只要能实现转台按照预设角度范围旋转即可;
[0041]
第一摆动机构5包括t形连接架501、第二电机502和变向连接件503;t形连接架501固定在旋转台402上,能随旋转台402同步转动;第二电机502穿过设置于t形连接架501上的通孔,与变向连接件503相连;第二电机502带动变向连接件503按照预设角度摆动角度β,具体来说,角度β的取值范围为-90
°
~90
°
;变向连接件503为相互垂直的两段,第一段上设第一通孔,连接在第二电机502的力输出端,第二段上设第二通孔,第二通孔的中心线与第一通孔的中心线在空间中垂直;角度β为变向连接件503的中心线与第一杆件3轴线的夹角;
[0042]
第二摆动机构6包括立板601、第二杆件602和第三电机603;第二杆件602的中间垂直方向上形成有立板601;第三电机603的力输出端穿过变向连接件503的第二段与立板601相连,第三电机603能通过立板601带动第二杆件602摆动至角度γ,具体来说,角度γ的取值范围为-90
°
~90
°
;第二杆件602远离立板601的一侧设有一个、两个或多个磁铁或吸盘604,用于实现工件的抓取。
[0043]
具体来说,第二电机502与变向连接件503连接时,两者间安装有减速器,第三电机603穿过变向连接件503的第二段与立板601连接时,第三电机603的力输出端安装有减速器。对于减速器的选型,只要能使相关部件按照要求摆动即可,而基于不同应用场景的精度要求,可依据具体要求进行选定。
[0044]
为了保证抓件时机器人的运动不会被料箱壁干涉,自动抓取抓手的长度大于等于料箱的高度。这样保证机器人不用探入料箱内,能减少对其运动轨迹的要求。
[0045]
利用如上自动抓取抓手对料箱7内无序摆放工件进行抓取的方法,为了方便表述,先以下限定:
[0046]
记待抓取工件8在抓取过程中与磁铁或吸盘相贴合的面为面i;
[0047]
料箱位置的上方固定安装有点云传感器,用于获取待抓取工件面i的点云图像;
[0048]
以料箱7的底面为xy面,以料箱的长边为x轴,短边为y轴;以料箱7高度方向为z轴,构建标准坐标系;
[0049]
抓取过程步骤如下:
[0050]
1)点云传感器扫描料箱7内的工件,获取待抓取工件8面i的点云图像,以面i的长边为x轴,短边为y轴,面i的法线方向为z轴建立坐标系i;
[0051]
求取标准坐标系与坐标系i之间的旋转关系r;
[0052]
2)基于面i所在位置距料箱顶部的距离确定抓取过渡点,并将其传输至机器人,末端连接有自动抓取抓手的机器人,运动到抓取过渡点;
[0053]
在抓取过渡点,机器人固定在料箱上方,自动抓取抓手调整位姿令磁铁或吸盘的表面与面i平行;
[0054]
3)机器人带动自动抓取抓手垂直向下运动至抓取位,第二杆件上设置的磁铁或者吸盘贴合面i,抓取工件,机器人带动自动抓取抓手垂直向上至抓取过渡点,再离开料箱,完成抓取。抓取位,即为机器人位置相对固定,磁铁或吸盘604抓取工件的位置。
[0055]
具体而言,步骤2)自动抓取抓手调整位姿令磁铁或吸盘的表面与面i平行的方法为:
[0056]
基于标准坐标系与坐标系i之间的旋转关系r,分别求取x、y、z的转向角,获取角度α、角度β及角度γ;
[0057]
继而,第一驱动电机带动转盘沿第一杆件的轴线转动角度α;
[0058]
第二驱动电机带动变向连接件摆动至角度β;
[0059]
第三驱动电机带动第二杆件摆动至角度γ。
[0060]
本领域技术人员也可以采用其他现有方法实现磁铁或吸盘的表面与面i平行。
[0061]
以下给出求取角度α、角度β及角度γ的欧拉公式:
[0062][0063]
其中:r(α,β,γ)代表用(α,β,γ)表示标准坐标系与坐标系i之间的旋转关系r。
[0064]
本发明提供的料箱内无序摆放工件的自动抓取抓手及方法,其结合旋转机构和两个摆动机构实现了抓手与待抓取工件表面贴合的可能性,继而使机器人在不进入料箱的情况下,垂直上下,最大限度的减少了料箱壁对机器人运动轨迹的干涉;除了个别紧贴料箱壁的不能完成自动抓件外,其余均可实现成功抓取,将抓取的成功性至少提升90%。另一方面,因机器人减少了进入料箱内的轨迹,有效降低了对机器人轨迹规划的要求。
[0065]
前面对本发明具体示例性实施方案所呈现的描述是出于说明和描述的目的。前面的描述并不想要成为毫无遗漏的,也不是想要把本发明限制为所公开的精确形式,显然,根据上述教导很多改变和变化都是可能的。选择示例性实施方案并进行描述是为了解释本发明的特定原理及其实际应用,从而使得本领域的其它技术人员能够实现并利用本发明的各种示例性实施方案及其不同选择形式和修改形式。本发明的范围旨在由所附权利要求书及其等价形式所限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1