一种冗余双臂协作机器人系统设计方法
1.本发明涉及冗余双臂协作机器系统技术领域,具体为一种冗余双臂协作机器人系统设计方法。
背景技术:
2.传统的单臂机器人广泛地应用于工业生产中,代替人工进行冲压、铸造、焊接、涂装、码垛等。但是在一些涉及精密装配、精细操作的应用场景,传统的单臂工业机器人很难通过协作来完成精密插装工作。因此,双臂协作机器人因其具有较高的灵活性和多功能性而逐渐加速应用于工业生产和生活服务领域。目前,双臂协作机器人从自由度角度来看,主要分为两种:两只六自由度臂和冗余双臂,其对应的代表产品有ur和yumi,其中,无论国外
3.但其在设计过程中往往会忽视冗余双臂的基座的合理安装,使双臂还不能拥有最佳的操纵性,以及急需一种冗余双臂协作机器人系统设计方法来解决上述问题。
技术实现要素:
4.本发明提供一种通过优化基座的安装提高双臂操纵性的冗余双臂协作机器人系统设计方法来解决上述现有技术中存在的问题。
5.为实现上述目的,本发明提供如下技术方案:一种冗余双臂协作机器人系统设计方法,包括如下步骤:
6.s1、构建冗余双臂协作机器人主体,包括躯干部分、左手臂组件、右手臂组件以及基座部分,并选取基座安装相关参数;
7.s2、获得反映冗余双臂操纵性能的静态性能指标,以及面向任务的冗余双臂的可操纵程度的动态指标;
8.s3、以构建的冗余双臂协作机器人主体作为仿真对象先后进行静态性能指标分析和动态指标分析,获得基座安装相关参数的最优解。
9.优选的,在步骤s1中,所述左手臂组件和右手臂组件采用两个单冗余臂设计,其构型符合srs构型的七自由度拟人化臂结构。
10.优选的,在步骤s1中,基座安装相关参数包括冗余双臂协作机器人的肩宽、上倾角和前倾角。
11.优选的,在步骤s2中,静态性能指标包括冗余双臂的公共工作空间和总工作空间的乘积;
12.其中,由蒙特卡洛方法和正向运动学获得冗余双臂的工作空间,通过椭球体公式获得两只单冗余臂的椭圆体工作空间相交所得的公共工作空间与总工作空间的体积。
13.优选的,蒙特卡洛方法的公式为:其中,其中,和分别代表关节角度的最大值和最小值;rand()代表的是一个随机函数,其取值在0与1之间;
14.椭球体公式为:v=(4π/3)
×
(abc);其中,v为椭球体的体积;a、b、c分别代表的为
椭球体三个轴的长度的一半。
15.优选的,在步骤s2中,静态性能指标包括冗余双臂的旋转角度,该旋转角度由冗余臂上的肩部、肘部以及腕部组成的平面与参考平面形成的夹角。
16.优选的,在步骤s2中,静态性能指标包括冗余双臂的受力情况fc与运动能力mc,求解公式为:
17.优选的,静态性能指标包括冗余双臂的可操纵性程度damm,其表达式为:
[0018][0019]
其中,p1为固定公共工作空间的一个点,在每个上/前倾角中改变旋转角度以获得damm(p1)。
[0020]
优选的,在步骤s2中,获取面向任务的冗余双臂的可操纵程度的动态指标具体为:
[0021]
a、根据任务要求获得速度和力的可操纵性程度椭球体,将所需可操纵性程度椭球体与实际可操纵性程度椭球体的交点定义为面向任务的可操作性,并以矩阵的形式获得描述面向任务的可操纵性程度的表达式:
[0022]
b、将面向任务的可操纵性程度tomm与冗余双臂的可操纵性程度damm综合获得面向任务的冗余双臂的可操纵程度todamm,并以矩阵的形式获得todamm的数学形式的表达式:
[0023]
c、通过蒙特卡洛方法设计一条处于公共工作空间的轨迹,由任务要求给出所需的可操纵程度。
[0024]
优选的,在步骤s3中,首先获得在各个上倾角/前倾角、肩宽情况下针对单一静态性能指标的仿真结果图,确定上倾角和前倾角,以及肩宽的局部最优范围;接着以静态分析的结果作为输入值,进行面对具体任务的动态分析,确定上倾角和前倾角,以及肩宽在冗余双臂的操纵性能最为理想的状况下的最优解。
[0025]
与现有技术相比,本发明的有益效果:本发明中通过选取基座安装相关参数,包括肩宽、上倾角和前倾角,并基于这三个参数,并通过反映冗余双臂操纵性能的静态性能指标和面向任务的冗余双臂的可操纵性等动态性能指标,在静态性能指标所得的两个倾角的最优区间内进一步获得了最优前倾角、上倾角和最优肩宽,使得系统中的冗余双臂获得了最理想的操纵性能,大大提升了冗余双臂的操纵性能。
附图说明
[0026]
附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。
[0027]
在附图中:
[0028]
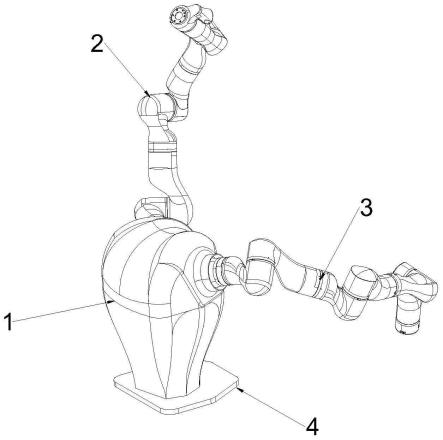
图1为本发明冗余双臂协作机器人主体图;
[0029]
图2为本发明构型类似于符合srs构型的七自由度拟人化臂的结构简图;
[0030]
图3为本发明双冗余机械臂的基础框架布置图;
[0031]
图4为本发明冗余机械臂的旋转角度示意图;
[0032]
图5为本发明冗余机械臂的可操纵性程度示意图;
[0033]
图6为本发明仿真获得的各个上/前倾角情况下ptcwv结果图;
[0034]
图7为本发明仿真获得的各个上/前倾角情况下sar和hep结果图;
[0035]
图8为本发明仿真获得的各个上/前倾角情况下fc和mc结果图;
[0036]
图9为本发明仿真获得的各个上/前倾角情况下damm结果图;
[0037]
图10为本发明冗余双臂机器人系统的最佳基座安装示意图;
[0038]
图中标号:1、躯干部分;2、左手臂组件;3、右手臂组件;4、基座部分。
具体实施方式
[0039]
以下结合附图对本发明的优选实施例进行说明,应当理解,此处所描述的优选实施例仅用于说明和解释本发明,并不用于限定本发明。
[0040]
实施例:一种冗余双臂协作机器人系统设计方法,包括如下步骤:
[0041]
s1、参考图1-图2所示,构建冗余双臂协作机器人主体,包括躯干部分1、左手臂组件2、右手臂组件3以及基座部分4,其中躯干部分模仿人的躯干构造,用以保护和连接支撑基座与左手臂组件、右手臂组件;左手臂组件和右手臂组件采用两个单冗余臂设计,其构型符合srs构型的七自由度拟人化臂结构;该构型总共由7个关节组成,其中前三个关节相当于一个球型关节,后三个关节的结构与人类手臂的腕部相类似;第四个关节则连接前后三个关节,与人类手臂的肘部关节相类似;可以自由灵活的工作,且其每个关节中都内置力矩传感器,能够很好的胜任柔顺控制工作;其末端执行器上可以安装摄像头,用于承担视觉工作。基座部分从下往上由一圆盘形底座连接一个圆柱形支撑件,上端连接着两个倾斜的圆盘形凸台,用于与左右手臂组件相连接;
[0042]
参考图3所示,基座安装相关参数包括冗余双臂协作机器人的肩宽(armdistance)、上倾角(upwardangle)以及前倾角(forwardangle),其中:
[0043]
冗余双臂机器人的肩宽:为左右冗余机械臂的肩峰点之间的直线距离;
[0044]
冗余双臂机器人的前倾角:将机器人放置于笛卡尔空间坐标系(x-y-z)中,基座的最底部与x-y平面相重合,将冗余双臂机器人向该面做投影,得到该机器人在空间上的俯视图;俯视图上机械臂与y轴形成的夹角称之为该机器人的前倾角;
[0045]
冗余双臂机器人的上倾角:将机器人放置于笛卡尔空间坐标系(x-y-z)中,基座的最底部与x-y平面相重合,将冗余双臂机器人向y-z平面做投影,得到该机器人在空间上的主视图;主视图上机械臂与y轴形成的夹角称之为该机器人的上倾角;
[0046]
参考下表所示为反映三个重要参数的左右冗余双臂的d-h表:
[0047]
左冗余臂dh参数表:
[0048][0049]
右冗余臂dh参数表:
[0050][0051]
s2、获得反映冗余双臂操纵性能的静态性能指标,以及面向任务的冗余双臂的可操纵程度的动态指标;
[0052]
其中,静态性能指标包括:
[0053]
公共工作空间和总工作空间的乘积(ptcwv),其中公共工作空间的大小反映了冗余双臂的可以到达的工作范围的大小,从而在一定程度上的反映冗余双臂的基座安装的好坏;由用于计算工作空间的蒙特卡洛方法和正向运动学,可以获得冗余双臂的工作空间;两只单冗余臂的椭圆体工作空间相交形成了冗余双臂的公共工作空间,由椭球体公式可估算出相交所得的公共工作空间与总工作空间的体积;其中蒙特卡洛方法的一般数学表达式以及椭圆体公式如下:
[0054][0055]
其中,和分别代表关节角度的最大值和最小值;rand()代表的是一个随机函数,其取值在0与1之间;
[0056]
v=(4π/3)
×
(abc);
[0057]
其中,v为椭球体的体积;a、b、c分别代表的为椭球体三个轴的长度的一半;
[0058]
冗余双臂的旋转角度(sar)可以反映该冗余臂在零空间中的避障能力,从而在一定程度上的反映冗余双臂的基座安装的好坏;参照图4所示,可以直观的感受到冗余双臂的旋转角度的定义:由冗余臂上的肩部、肘部以及腕部组成的平面与参考平面形成的夹角为旋转角旋转角的范围(sar)受到关节的限制,肘部位置高度(hep)需要在参考平面内以极坐标的形式来描述,即绕极坐标的原点并以长度r为半径画圆;一条射线从轴的正半轴开始旋转角度的大小为与上述所得圆的交点到轴的垂直距离定义为hep;固定公共工作
空间的任意一个点为任务中心,改变上/前倾角以及肩宽以获得sar和hep,其中,参考平面的定义为当具有srs构型的拟人化机械臂的关节轴2与关节轴4平行时两轴构成的平面;
[0059]
受力情况fc与运动能力mc:使用由速度向量与雅可比矩阵组成的表达式来定义用于描述冗余双臂运动能力(mc)的可操纵性程度椭球体;表达式为:其中,与分别代表在笛卡尔空间和关节空间的运动向量; j代表的是雅可比矩阵;
[0060]
其中,使用结构相类似的表达式来定义用于反映冗余双臂受力情况(fc) 的可操纵性程度椭球体,表达式为:||τ||2=[f
t
(jj
t
)f]=1;其中,τ和f分别代表在笛卡尔空间和关节空间中的力的向量;j代表的是雅可比矩阵;
[0061]
其中,表达式中可操纵性程度矩阵为雅可比矩阵j与其本身的转置矩阵j
t
的乘积,即jj
t
;该矩阵的最小奇异值反映冗余双臂更好的受力情况。固定公共工作空间的任意一个点为任务中心,在每个上/前倾角中改变旋转角度以获得mc 和fc;求解公式为:
[0062]
冗余双臂的可操纵性程度damm:可以反映该冗余臂的灵活程度,从而在一定程度上反映冗余双臂的基座安装的好坏;以向量的形式给出描述冗余双臂精密协作的表达式:其中,j
21
代表的是点p1与点p2之间常数化雅可比行列式;冗余双臂的可操纵性程度可定义为两只单冗余臂各自的椭圆体工作空间,参照图5可以发现为1e(p1)和2e(p1)的交集,给出冗余双臂的可操纵性程度的数学形式的表达式;固定公共工作空间的一个点p1,在每个上/前倾角中改变旋转角度以获得damm(p1)。冗余双臂的可操纵性程度的数学形式的表达式为:其中,p1为固定公共工作空间的一个点,在每个上/前倾角中改变旋转角度以获得damm(p1)
[0063]
动态性能指标被用来反映在给定具体的任务情况下,冗余双臂协作机器人系统的工作能力;根据任务要求获得速度和力的可操纵性程度椭球体,将所需可操纵性程度椭球体与实际可操纵性程度椭球体的交点定义为面向任务的可操作性。以矩阵的形式给出描述面向任务的可操纵性程度tomm的表达式:将面向任务的可操纵性程度(tomm)与冗余双臂的可操纵性程度(damm)综合获得面向任务的冗余双臂的可操纵程度(todamm),以矩阵的形式给出todamm的数学形式的表达式:通过蒙特卡洛方法设计一条处于公共工作空间的轨迹,由任务要求给出所需的可操纵性。
[0064]
s3、以构建的冗余双臂协作机器人主体作为仿真对象先后进行静态性能指标分析和动态指标分析,获得基座安装相关参数的最优解;
[0065]
其中,基于上述三个基座安装相关参数,以及各个静态性能指标和动态性能指标
进行分析,首先获得在各个上倾角/前倾角、肩宽情况下针对单一静态性能指标的仿真结果图,确定上倾角和前倾角,以及肩宽的局部最优范围;接着以静态分析的结果作为输入值,进行面对具体任务的动态分析,确定上倾角和前倾角,以及肩宽在冗余双臂的操纵性能最为理想的状况下的最优解。
[0066]
一具体实施例中,以上述构建的冗余双臂协作机器人主体为为研究对象,获得的仿真结果如图6-10所示:
[0067]
其中,参考图6所示,仿真获得的各个上/前倾角情况下ptcwv结果可以发现,针对这一静态性能指标,上/前倾角在冗余双臂的操纵性能最优的情况下的局部最优范围为(40
°
,70
°
);
[0068]
如图7所示,仿真获得的各个上/前倾角情况下sar和hep结果可以发现,针对这一静态性能指标,上/前倾角在冗余双臂的操纵性能最优的情况下的局部最优范围分别为(0
°
,20
°
)和(50
°
,65
°
);
[0069]
如图8所示,仿真获得的各个上/前倾角情况下fc和mc结果可以发现,针对这一静态性能指标,上/前倾角在冗余双臂的操纵性能最优的情况下的局部最优范围分别为(0
°
,20
°
)和(50
°
,70
°
);
[0070]
如图9所示,仿真获得的各个上/前倾角情况下damm的结果可以发现,针对这一静态性能指标,前倾角在冗余双臂的操纵性能最优的情况下的局部最优范围为(50
°
,70
°
);
[0071]
综上所述,各个静态性能指标下上/前倾角在冗余双臂的操纵性能最优的情况下最优范围分别为(0
°
,20
°
)和(50
°
,65
°
);以该范围为输入值,对该模型进行面对具体任务的动态分析,从而确定了这两个角和肩宽在冗余双臂的操纵性能最为理想的状况下上/前倾角的最优解为15
°
和50
°
,参考图10所示,为除去外壳后,冗余双臂机器人系统的最佳基座安装示意图。
[0072]
最后应说明的是:以上所述仅为本发明的优选实例而已,并不用于限制本发明,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1