一种并联机械手的制作方法
本发明涉及机器人,尤其是涉及一种并联机械手。
背景技术:
1、空间三维平动二维转动的五自由度并联机构可满足测量、喷涂、搬运、装配等作业要求。
2、专利文献cn103350417a公开了一种可实现三维平动二维转动的并联机构,包括固定架和动平台,固定架上固接有五个驱动装置,动平台包括中心板和垂直地贯穿于中心板中心位置的摇杆,中心板与摇杆之间采用虎克铰转动连接,摇杆的上端固定有两个球头杆;固定架与中心板之间连接有三条第一支链,固定架与两个球头杆之间连接有两条第二支链;中心板在三条第一支链的带动下实现三维平动,摇杆在两条第二支链带动下通过虎克铰实现相对于中心板的二维转动,从而使摇杆既有三个平动自由度,又有两个转动自由度。
3、专利文献cn103350418a公开了一种高速五自由度并联机械手,包括固定架和动平台,固接在固定架上的五个驱动装置,以及五条结构相同的支链;每条支链由近架杆、上连接轴、两个平行且等长的远架杆和下连接轴构成一平行四边形结构;动平台包括水平布置的上平台和下平台,其中三条支链中的下连接轴设置在下平台上,另外两条支链中的下连接轴设置在上平台上,垂直于上、下平台贯穿的设置有一摇杆,摇杆与上、下平台之间均采用虎克铰转动连接;下平台在三条支链的带动下实现三维平动,上平台在摇杆和另外两条支链的共同作用下实现三维平动;虎克铰将上、下平台之间的相对移动转化为摇杆的二维转动,从而使摇杆既有三个平动自由度,又有两个转动自由度。
4、虽然以上结构紧凑,设计巧妙,但无法实现大转角范围的转动。
技术实现思路
1、本发明的目的在于提供一种并联机械手。
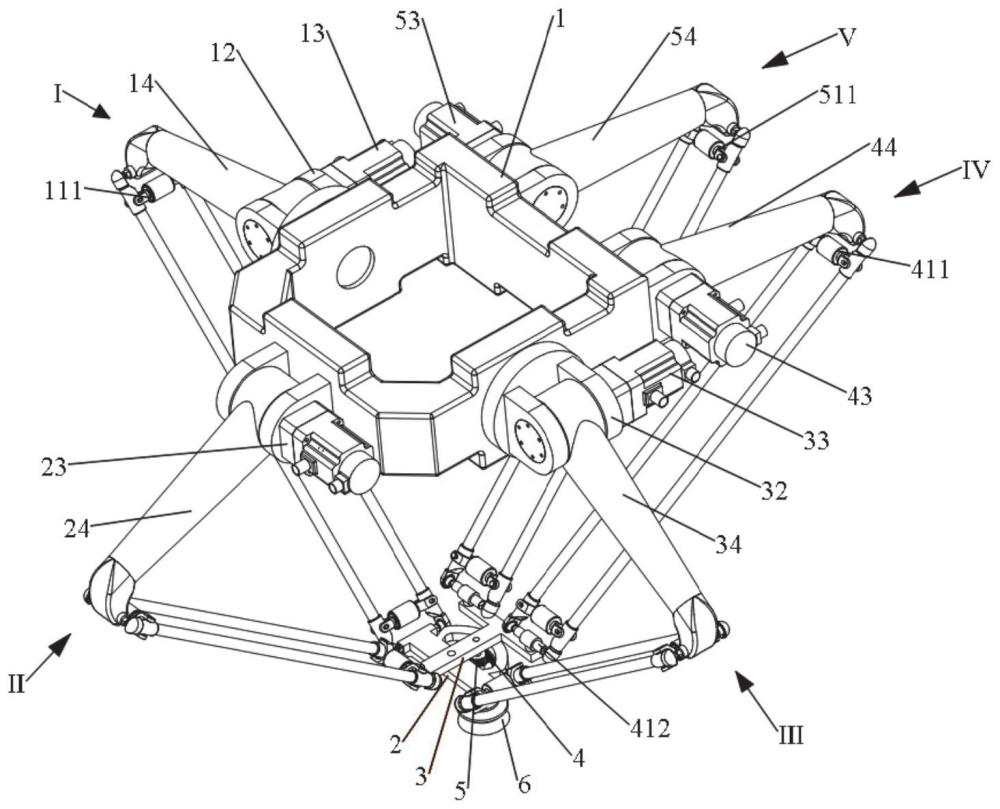
2、实现本发明目的的技术解决方案是:一种三平二转五自由度并联机构,包括固定架、主平台、副平台、大齿轮、小齿轮、吸盘、布置在固定架和主平台之间的第一支链和第三支链,布置在所述固定架与副平台之间的第二支链、第四支链和第五支链,所述主平台与副平台转动连接,所述小齿轮旋转的连接在副平台上,所述大齿轮与主平台固接,所述大齿轮和小齿轮相啮合;
3、所述第一支链和第三支链结构完全相同,每条支链均包括转动叉、主动臂驱动装置、主动臂、第一从动臂和第二从动臂,所述转动叉与固定架转动连接,所述主动臂驱动装置固接在转动叉上,所述主动臂的一端转动连接于对应支链的转动叉内,且与所述主动臂驱动装置的驱动端固接,主动臂的另一端的两侧分别与第一从动臂、第二从动臂的一端连接,所述第一从动臂、第二从动臂的另一端均与主平台连接,每条支链中的第一从动臂与第二从动臂平行且等长;
4、所述第二支链、第四支链、第五支链结构完全相同,每条支链均包括主动臂驱动装置、主动臂、第一从动臂、第二从动臂、旋转接头,所述主动臂驱动装置固接在固定架上,所述主动臂的一端与固定架转动连接,且与所述主动臂驱动装置的驱动端固接,主动臂的另一端的两侧分别与第一从动臂、第二从动臂的一端连接,所述第一从动臂、第二从动臂的另一端均与旋转接头连接,每条支链中的第一从动臂与第二从动臂平行且等长,所述旋转接头均与副平台转动连接;
5、连接所述第二支链旋转接头与副平台的转动轴线、连接所述第四支链旋转接头与副平台的转动轴线、连接所述第五支链旋转接头与副平台的转动轴线、连接所述主平台与副平台的转动轴线,连接所述小齿轮和副平台的转动轴线共五条轴线相互平行;
6、连接第一支链转动叉与其主动臂的转动轴线和连接第三支链转动叉与其主动臂的转动轴线平行,连接第一支链转动叉与固定架的转动轴线、连接第三支链转动叉与固定架的转动轴线、连接第二支链主动臂与固定架的转动轴线、连接第四支链主动臂与固定架的转动轴线、连接第五支链主动臂与固定架的转动轴线共五条轴线相互平行。
7、本发明与现有技术相比,其显著优点为:本发明的三平二转五自由度并联机构结构紧凑、布局巧妙,即可实现大角度的摆动,又利用双平台结构实现末端旋转运动的放大;且驱动装置设置在固定架附近,有利于提高机构的动态响应特性,有利于实现高速和高加速度。
技术特征:
1.一种三平二转五自由度并联机构,其特征在于,所述并联机构包括固定架(1)、主平台(2)、副平台(3)、大齿轮(4)、小齿轮(5)、吸盘(6)、布置在固定架(1)和主平台(2)之间的第一支链(ⅰ)和第三支链(ⅲ),布置在所述固定架(1)与副平台(3)之间的第二支链(ⅱ)、第四支链(ⅳ)和第五支链(ⅴ),所述主平台(2)与副平台(3)转动连接,所述小齿轮(5)旋转的连接在副平台(3)上,所述大齿轮(4)与主平台(2)固接,所述大齿轮(4)和小齿轮(5)相啮合;
2.根据权利要求1所述的三平二转五自由度并联机构,其特征在于,在第一支链(i)和第三支链(ⅲ)中,主动臂与对应的第一从动臂之间通过第一球接头连接,主动臂与对应的第二从动臂之间通过第二球接头连接,第一从动臂与主平台(2)之间通过第三球接头连接,第二从动臂与主平台(2)之间通过第四球接头连接;
3.根据权利要求1所述的三平二转五自由度并联机构,其特征在于,在五条支链中,所述第一从动臂和对应的第二从动臂之间设有两个拉簧,其内部有弹簧,用于约束两条从动臂,实现球接头与球碗的连接,所述拉簧的一端与第一从动臂转动连接,另一端与第二从动臂转动连接;
4.根据权利要求2所述的三平二转五自由度并联机构,其特征在于,在第一支链(ⅰ)和第三支链(ⅲ)中,其第一球接头和第二球接头均与主动臂固接;所述第三球接头和第四球接头均与主平台(2)固接;所述第一从动臂的一端与第一球接头球铰接,另一端与第三球接头球铰接;所述第二从动臂的一端与第二球接头球铰接,另一端与第四球接头球铰接;连接所述第一球接头球心和第二球接头球心的连线、连接第三球接头球心和第四球接头球心的连线、以及连接所述主动臂与转动叉的转动轴线相互平行;
技术总结
本发明公开了一种三平二转五自由度并联机构,包括固定架、主平台、副平台、大齿轮、小齿轮、吸盘、布置在固定架和主平台之间的第一和第三支链,布置在固定架与副平台之间的第二、第四、第五支链;五条支链均包括主动臂、两个平行且等长的从动臂,两个拉簧以及四个球接头,第一、第三支链均还包含转动叉,第二、第四、第五支链均还包含旋转接头;主动臂与固定架或转动叉转动连接,从动臂通过球接头一端与主动臂相连,另一端与旋转接头或主平台相连,旋转接头与副平台转动连接,主平台与副平台转动连接,大齿轮与小齿轮分别与主平台和副平台相连。本发明结构紧凑、布局巧妙,即可实现大角度的摆动,又利用双平台结构实现末端旋转运动的放大。
技术研发人员:刘松涛,王云磊,杨玉杰,王红阳
受保护的技术使用者:江苏小野智能装备有限公司
技术研发日:
技术公布日:2024/3/11
- 还没有人留言评论。精彩留言会获得点赞!