一种机器人末端快换器对接装置
1.本发明涉及工业机器人技术领域,尤其涉及一种机器人末端快换器的快速对接装置。
背景技术:
2.工业机械手(工业机器人)凭借灵活、可靠的功能广泛应用于电子、物流、化工等智能制造领域,工作时,当同一工位完成需要完成不同的工艺任务时,通过更换末端工具实现。工位工艺的要求越多,机器人配备的末端工具夹具就越多,在复杂的工位上,机器人配备有多个末端工具组成的工具库,为实现末端工具的快速更换,现有的方法是通过一个安装在机器人手臂上侧的末端快换公头,以及包括一个或多个放置于工作台的末端快换母头快速示教对接更换。机器人末端快换装置设计的出现,使得机器人可以在同一工位完成不同工序任务,但过多的快换夹具同时也给机器人示教带来了不便,当需要更换不同位置的末端夹具时,都需要逐个示教点位,尤其给操作工业机器人的新手带来了极大的困扰。
技术实现要素:
3.发明目的:本发明的目的是提供一种机器人末端快换器的快速对接装置。
4.技术方案:一种机器人末端快换器对接装置,包括操作平台、操作机器人、激光发射器和快换器工作台,所述激光发射器安装在操作机器人第六轴杆状前端上,并与第六轴平行,所述快换器工作台包括驱动电机和盘状工具库,驱动电机根据操作机器人的需求带动盘状工具库中的夹具移动至更换位置,快换器工作台上方中央处安装有位置敏感定位面板,所述位置敏感定位面板接收激光发射器发出的激光并测出盘状工具库中夹具的公头和母头的相对位移。
5.进一步地,所述激光发射器套于第六轴杆状前端的螺杆上。
6.进一步地,所述快换器工作台安装于操作平台上。
7.进一步地,所述操作平台上安装有用于显示夹具位置信息的显示面板。
8.进一步地,所述位置敏感定位面板上安装有数据采集器,将数据采集并传输给显示面板。
9.进一步地,所述夹具安装于盘状工具库的末端,包括不同的类型。
10.进一步地,所述盘状工具库安装于驱动电机的上侧。
11.有益效果:本发明与现有技术相比,具有如下显著优点:辅助机器人末端快换器快速对接更换,缩短了机器人示教时间,提高了生产效率。
附图说明
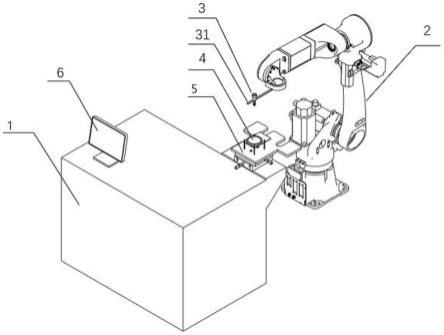
12.图1为本发明的结构示意图;
13.图2为激光发射器的结构示意图;
14.图3为杆状前端的结构示意图;
15.图4为位置敏感定位面板的示意图;
16.图5为盘状工具库工具一的示意图;
17.图6为盘状工具库工具二的示意图。
具体实施方式
18.下面结合附图对本发明的技术方案作进一步说明。
19.如图1所示,本发明装置包括操作平台1、操作机器人2、激光发射器3和快换器工作台5,所述激光发射器3安装在操作机器人2第六轴杆状前端31上,并与第六轴平行,如图2所示,激光发射器3在第六轴杆状前端31上可移动,如图3所示为杆状前端31的结构示意图。
20.所述快换器工作台5包括驱动电机51和盘状工具库52,驱动电机51根据操作机器人2的需求带动盘状工具库52中的夹具移动至更换位置,盘状工具库52安装在驱动电机51上侧,夹具安装于盘状工具库52的末端,用于放置不同类型末端夹具,如图5、图6所示为不同类型的末端夹具,快换器工作台5安装于操作平台1上。
21.如图4所示,快换器工作台1上方中央处安装有位置敏感定位面板4,所述位置敏感定位面板4接收激光发射器3发出的激光并测出盘状工具库52中夹具的公头和母头的相对位移。操作平台1上安装有用于显示夹具位置信息的显示面板6,位置敏感定位面板上安装有数据采集器,将数据采集并传输给显示面板6。
22.在对接机器人末端快换器工具时,操作机器人2通过激光发射器3发射激光照射工作台1上的位置敏感定位面板4,测得机器人末端夹具公头和母头的相对位移,通过位置数据采集器,接收位置敏感定位面板4的位置数据,并通过程序传输给显示面板6反馈给所述用户,此时,所述用户直接操作机器人2在x、y方向上移动,就可以实现机器人末端快换装置母头与末端工具公头的快速对接,极大地缩短机器人示教时间,节省了生产调试时间和成本,有效地提高了生产效率。
23.本发明也可用于机器人操作工序位置的快速对接,对接时只要将位置敏感定位面板置于工作位置某一点,所述用户通过读出目标点的相对坐标,移动机器人即可到达目标点。
技术特征:
1.一种机器人末端快换器对接装置,其特征在于:包括操作平台(1)、操作机器人(2)、激光发射器(3)和快换器工作台(5),所述激光发射器(3)安装在操作机器人(2)第六轴杆状前端(31)上,并与第六轴平行,所述快换器工作台(5)包括驱动电机(51)和盘状工具库(52),驱动电机(51)根据操作机器人(2)的需求带动盘状工具库(52)中的夹具移动至更换位置,快换器工作台(1)上方中央处安装有位置敏感定位面板(4),所述位置敏感定位面板(4)接收激光发射器(3)发出的激光并测出盘状工具库(52)中夹具的公头和母头的相对位移。2.根据权利要求1所述的机器人末端快换器对接装置,其特征在于:所述激光发射器(3)套于第六轴杆状前端(31)的螺杆上。3.根据权利要求1所述的机器人末端快换器对接装置,其特征在于:所述快换器工作台(5)安装于操作平台(1)上。4.根据权利要求1所述的机器人末端快换器对接装置,其特征在于:所述操作平台(1)上安装有用于显示夹具位置信息的显示面板(6)。5.根据权利要求1所述的机器人末端快换器对接装置,其特征在于:所述位置敏感定位面板(4)上安装有将数据采集并传输给显示面板(6)的数据采集器。6.根据权利要求1所述的机器人末端快换器对接装置,其特征在于:所述夹具安装于盘状工具库(52)的末端,包括不同的类型。7.根据权利要求1所述的机器人末端快换器对接装置,其特征在于:所述盘状工具库(52)安装于驱动电机(51)的上侧。
技术总结
本发明公开了一种机器人末端快换器对接装置,包括操作平台、操作机器人、激光发射器和快换器工作台,所述激光发射器安装在操作机器人第六轴杆状前端上,并与第六轴平行,所述快换器工作台包括驱动电机和盘状工具库,驱动电机根据操作机器人的需求带动盘状工具库中的夹具移动至更换位置,快换器工作台上方中央处安装有位置敏感定位面板,所述位置敏感定位面板接收激光发射器发出的激光并测出盘状工具库中夹具的公头和母头的相对位移。本发明装置能够辅助机器人末端快换器快速对接更换,缩短了机器人示教时间,提高了生产效率。提高了生产效率。提高了生产效率。
技术研发人员:赵海峰 郭燕 汤凯 李飞锦 王家豪
受保护的技术使用者:南京信息职业技术学院
技术研发日:2022.08.26
技术公布日:2023/1/17
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1