动平台可重构的并联机构
1.本发明属于机构学及机器人领域,涉及一种动平台可重构的并联机构。
背景技术:
2.传统的固定自由度并联机构因具有高刚度、高承载能力、高精度、高速度等优点,使其在医疗机器人、力/力矩传感器、重载操作、工业机器人、增材制造、运动模拟器、微纳操作等领域得到了广泛应用。
3.但随着现代科技的发展,在极端作业、医疗康复、太空探索、智能制造等领域越来越希望机器具有更高的柔性。在这种背景下,传统机构由于拓扑结构与机构活动度的单一性,很难满足人工智能和机器人等领域日益发展的需求,这就需要对构成机器的机构进行创新设计,对传统机构概念与设计进行彻底变革,以满足多变环境、工况和任务需求。因此,可重构并联机构引起了学者们的广泛关注,成为机构学和机器人学领域的研究热点。学者们利用变胞运动副、可锁死关节、约束奇异单环闭链、变胞单环闭链、可重构运动平台等综合了一些特色鲜明的可重构并联机构,但由驱动副控制、动平台可重构、多模式输出的并联机构仍然比较少。
4.因此,为满足工业生产需求,有必要发明新的、结构简单、可独立控制的可重构动平台多模式并联机构。
技术实现要素:
5.本发明要解决的技术问题是:为了解决现有技术中的不足,现提供一种动平台可重构的并联机构,它具有结构简单、控制方便、耦合度为零,运动学正解和动力学求解比较容易等优点。
6.本发明解决其技术问题所采用的技术方案是:一种动平台可重构的并联机构,包括共享混合支链、一般支链一、一般支链二、静平台、右动平台及左动平台;
7.所述共享混合支链包含由支链一和支链二并联连接而成的空间子并联机构;支链一由移动副一、转动副一、转动副二及转动副三依次串联构成;移动副一的移动方向、转动副一的轴线、转动副二的轴线及转动副三的轴线均与y轴方向平行;支链二由移动副二、转动副四及转动副五依次串联构成,转动副四的轴线和转动副五的轴线均与x轴方向平行,转动副三通过输出杆连接转动副五;
8.所述移动副一和移动副二均为驱动副,并设置在静平台上,移动副一的移动方向和移动副二的移动方向在同一条直线上;所述一般支链一和一般支链二均包含有设置于静平台上并作为驱动副的移动副;
9.所述右动平台和所述一般支链一位于共享混合支链的右侧,右动平台的左端通过转动副六与输出杆连接,转动副六的轴线与y轴方向平行,所述一般支链一的一端连接于静平台,另一端连接于右动平台的右端,并用于使得右动平台具有沿y轴方向平移、沿z轴方向平移及绕y轴转动的输出运动;
10.所述左动平台和所述一般支链二均位于共享混合支链的左侧,所述左动平台的右端通过转动副七与输出杆连接,转动副七的轴线与y轴方向平行,所述一般支链二的一端连接于静平台,另一端连接于左动平台的左端,并用于使得左动平台具有沿y轴方向平移、沿z轴方向平移及绕y轴转动的输出运动。
11.进一步地,所述一般支链一由移动副三、平行四边形机构一、转动副八和转动副九依次串联构成;
12.所述一般支链二由移动副四、平行四边形机构二、转动副十和转动副十一依次串联构成;
13.所述平行四边形机构一和平行四边形机构二均由轴线相互平行的转动副a、转动副b、转动副c及转动副d依次串联组成,转动副a的轴线与x轴方向平行;所述转动副a与转动副b之间的连杆为下连杆,转动副c及转动副d之间的连杆为上连杆;
14.所述移动副三和平行四边形机构一的下连杆固定连接,平行四边形机构一的上连杆和转动副八固定连接,转动副九与右动平台的右端连接;
15.所述移动副四和平行四边形机构二的下连杆固定连接,平行四边形机构二的上连杆和转动副十固定连接,转动副十一与左动平台的左端连接;
16.所述移动副三的移动方向、移动副四的移动方向、转动副八的轴线、转动副九的轴线、转动副十的轴线及转动副十一的轴线均与y轴方向平行;
17.所述移动副三和移动副四均设置于静平台上,移动副三和移动副四均为驱动副。
18.进一步地,所述一般支链一由移动副三、转动副十二、转动副八、转动副九及转动副十三依次串联构成;所述移动副三设置于静平台上,且为驱动副;所述移动副三的移动方向、转动副九的轴线及转动副十三的轴线均与y轴方向平行,所述转动副十二的轴线和转动副八的轴线均与x轴方向平行;所述转动副十三与右动平台的右端连接;
19.所述一般支链二由移动副四、转动副十四、转动副十、转动副十一、转动副十五依次串联构成;所述移动副四设置于静平台上,且为驱动副;所述移动副四的移动方向、转动副十一的轴线及转动副十五的轴线均与y轴方向平行,所述转动副十四的轴线和转动副十的轴线均与x轴方向平行;所述转动副十五与左动平台的左端连接。
20.进一步地,所述一般支链一由移动副三、转动副十二、转动副八、转动副九及转动副十三依次串联构成;所述移动副三设置于静平台上,且为驱动副;所述移动副三的移动方向、转动副十二的轴线及转动副十三的轴线均与y轴方向平行,所述转动副八的轴线及转动副九的轴线均与x轴方向平行;所述转动副十三与右动平台的右端连接;
21.所述一般支链二由移动副四、转动副十四、转动副十、转动副十一、转动副十五依次串联构成;所述移动副四设置于静平台上,且为驱动副;所述移动副四的移动方向、转动副十四的轴线及转动副十五的轴线均与y轴方向平行,所述转动副十的轴线及转动副十一的轴线均与x轴方向平行;所述转动副十五与左动平台的左端连接。
22.进一步地,所述一般支链一为一条无约束支链,由移动副三、球副一和球副二依次串联组成;所述移动副三设置于静平台上,且为驱动副;球副二连接右动平台的右端;
23.所述一般支链二为一条无约束支链,由移动副四、球副三和球副四依次串联组成;所述移动副四设置于静平台上,且为驱动副;球副四连接左动平台的左端。
24.进一步地,所述一般支链一由移动副三、转动副十二、转动副八、转动副九及转动
副十三依次串联构成;所述移动副三设置于静平台上,且为驱动副;所述移动副三的移动方向、转动副的轴线及转动副十三的轴线均与y轴方向平行,所述转动副十二的轴线和转动副八的轴线均与x轴方向平行;所述转动副十三与右动平台的右端连接;
25.所述一般支链二由移动副四、平行四边形机构二、转动副十和转动副十一依次串联构成;所述平行四边形机构二均由轴线相互平行的转动副a、转动副b、转动副c及转动副d依次串联组成,转动副a的轴线与x轴方向平行;所述转动副a与转动副b之间的连杆为下连杆,转动副c及转动副d之间的连杆为上连杆;所述移动副四和平行四边形机构二的下连杆固定连接,平行四边形机构二的上连杆和转动副十固定连接,转动副十一与左动平台的左端连接;所述移动副四的移动方向、转动副十的轴线及转动副十一的轴线均与y轴方向平行;所述移动副四设置于静平台上,且为驱动副。
26.进一步地,所述一般支链一由移动副三、转动副十二、转动副八、转动副九及转动副十三依次串联构成;所述移动副三设置于静平台上,且为驱动副;所述移动副三的移动方向、转动副十二的轴线及转动副十三的轴线均与y轴方向平行,所述转动副八的轴线及转动副九的轴线均与x轴方向平行;所述转动副十三与右动平台的右端连接;
27.所述一般支链二由移动副四、转动副十四、转动副十、转动副十一、转动副十五依次串联构成;所述移动副四设置于静平台上,且为驱动副;所述移动副四的移动方向、转动副十一的轴线及转动副十五的轴线均与y轴方向平行,所述转动副十四的轴线和转动副十的轴线均与x轴方向平行;所述转动副十五与左动平台的左端连接。
28.进一步地,所述转动副六的轴线、转动副七与转动副三的轴线重合。
29.本发明的有益效果是:本发明动平台可重构的并联机构采用共享混合支链i、一般支链一ii及一般支链二iii这三条支链共同组成,并由驱动副控制,使得右动平台及左动平台能产生沿o-yz平面内的两维平移以及绕y轴的一维转动的输出运动,实现动平台重构及多位姿输出。
附图说明
30.下面结合附图和实施例对本发明进一步说明。
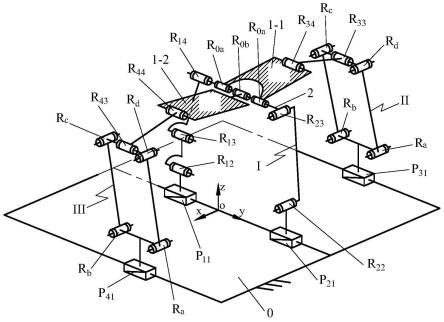
31.图1是实施例1中动平台可重构的并联机构的示意图;
32.图2是实施例2中动平台可重构的并联机构的示意图;
33.图3是实施例3中动平台可重构的并联机构的示意图;
34.图4是实施例4中动平台可重构的并联机构的示意图;
35.图5是实施例5中动平台可重构的并联机构的示意图;
36.图6是实施例6中动平台可重构的并联机构的示意图;
37.图中:0、静平台、1-1、右动平台,1-2、左动平台,2、输出杆;
38.i、共享混合支链,ii、一般支链一,iii、一般支链二;
39.p
11
、移动副一,p
21
、移动副二,p
31
、移动副三,p
41
、移动副四;
40.r
12
、转动副一,r
13
、转动副二,r
14
、转动副三,r
22
、转动副四,r
23
、转动副五,r
0a
、转动副六,r
0b
、转动副七,r
33
、转动副八,r
34
、转动副九,r
43
、转动副十,r
44
、转动副十一,r
32
、转动副十二,r
35
、转动副十三,r
42
、转动副十四,r
45
、转动副十五;
41.ra、转动副a,rb、转动副b,rc、转动副c,rd转动副d。
42.s
32
、球副一,s
33
、球副二,s
42
、球副三,s
43
、球副四。
具体实施方式
43.现在结合附图对本发明作进一步详细的说明。这些附图均为简化的示意图,仅以示意方式说明本发明的基本结构,因此其仅显示与本发明有关的构成,方向和参照(例如,上、下、左、右、等等)可以仅用于帮助对附图中的特征的描述。因此,并非在限制性意义上采用以下具体实施方式,并且仅仅由所附权利要求及其等同形式来限定所请求保护的主题的范围。
44.实施例1
45.如图1所示,一种动平台可重构的并联机构,包括共享混合支链i、一般支链一ii、一般支链二iii、静平台0、右动平台1-1及左动平台1-2;
46.在本实施例中x轴、y轴及z轴构成三维直角坐标系,x轴为左右方向,y轴为前后方向,z轴为上下方向;
47.共享混合支链i包含由支链一和支链二并联连接而成的空间子并联机构;支链一由移动副一p
11
、转动副一r
12
、转动副二r
13
及转动副三r
14
依次串联构成;移动副一p
11
的移动方向、转动副一r
12
的轴线、转动副二r
13
的轴线及转动副三r
14
的轴线均与y轴方向平行;支链二由移动副二p
21
、转动副四r
22
及转动副五r
23
依次串联构成,转动副四r
22
的轴线和转动副五r
23
的轴线均与x轴方向平行,转动副三r
14
通过输出杆2连接转动副五r
23
;
48.移动副一p
11
和移动副二p
21
均为驱动副,并设置在静平台0上,移动副一p
11
的移动方向和移动副二p
21
的移动方向在同一条直线上;一般支链一ii和一般支链二iii均包含有设置于静平台0上并作为驱动副的移动副;
49.右动平台1-1和一般支链一ii位于共享混合支链i的右侧,右动平台1-1的左端通过转动副六r
0a
与输出杆2连接,转动副六r
0a
的轴线与y轴方向平行,一般支链一ii的一端连接于静平台0,另一端连接于右动平台1-1的右端,并用于使得右动平台1-1具有沿y轴方向平移、沿z轴方向平移及绕y轴转动的输出运动;
50.左动平台1-2和一般支链二iii均位于共享混合支链i的左侧,左动平台1-2的右端通过转动副七r
0b
与输出杆2连接,转动副七r
0b
的轴线与y轴方向平行,一般支链二iii的一端连接于静平台0,另一端连接于左动平台1-2的左端,并用于使得左动平台1-2具有沿y轴方向平移、沿z轴方向平移及绕y轴转动的输出运动。
51.优选地,转动副六r
0a
的轴线、转动副七r
0b
与转动副三r
14
的轴线重合。
52.一般支链一ii和一般支链二iii的拓扑结构可以相同也可以不同;
53.本实施例中,一般支链一ii和一般支链二iii的具体构造及配置如下:
54.一般支链一ii由移动副三p
31
、平行四边形机构一、转动副八r
33
和转动副九r
34
依次串联构成;
55.一般支链二iii由移动副四p
41
、平行四边形机构二、转动副十r
43
和转动副十一r
44
依次串联构成;
56.平行四边形机构一和平行四边形机构二均由轴线相互平行的转动副ara、转动副brb、转动副crc及转动副drd依次串联组成,转动副ara的轴线、转动副brb的轴线、转动副crc的轴线及转动副drd的轴线均与x轴方向平行;转动副ara与转动副brb之间的连杆为下连杆,
转动副crc及转动副drd之间的连杆为上连杆;
57.移动副三p
31
和平行四边形机构一的下连杆固定连接,平行四边形机构一的上连杆和转动副八r
33
固定连接,转动副九r
34
与右动平台1-1的右端连接;
58.移动副四p
41
和平行四边形机构二的下连杆固定连接,平行四边形机构二的上连杆和转动副十r
43
固定连接,转动副十一r
44
与左动平台1-2的左端连接;
59.移动副三p
31
的移动方向、移动副四p
41
的移动方向、转动副八r
33
的轴线、转动副九r
34
的轴线、转动副十r
43
的轴线及转动副十一r
44
的轴线均与y轴方向平行;
60.移动副三p
31
和移动副四p
41
均设置于静平台0上,移动副三p
31
和移动副四p
41
均为驱动副。
61.本实施例中移动副一p
11
、移动副二p
21
、移动副三p
31
和移动副四p
41
的轴线方向相互平行,且为驱动副;这样,共享混合支链i、一般支链一ii、一般支链二iii这三条支链共同组成了一个动平台可重构、可折叠、输出为多种运动位姿的并联机构;
62.其中,一般支链一ii或一般支链二iii与共享混合支链i并联连接后,均可视为一个三自由度、零耦合度的独立并联机构单元,每个单元能产生沿o-yz平面内的两维平移以及绕y轴的一维转动的输出运动,且具有符号式位置正解与部分运动解耦性。
63.当移动副一p
11
、移动副二p
21
、移动副三p
31
和移动副四p
41
驱动时,左右两侧独立的右动平台1-1及左动平台1-2能产生两平移一转动的输出运动,并能进行独立调节,以此由驱动副控制,改变右动平台1-1及左动平台1-2位置,实现动平台重构及多位姿输出,且结构简单、加工制造容易,控制方便,可广泛应用于工业生产中;例如,可运用到太阳能上,两块太阳能电池板分别安装到右动平台1-1及左动平台1-2上,右动平台1-1及左动平台1-2多位姿的运动输出可根据太阳的东升日落的变化,对动平台的位姿进行调节控制,使其充分接收太阳光,实现太阳能光伏电池板高效利用;与传统的固定式光伏电池板相比,利用所设计的多位姿输出,可以帮助实现光伏发电高效化、动态化。
64.实施例2
65.如图2所示,实施例2与实施例1的区别在于:一般支链一ii由移动副三p
31
、转动副十二r
32
、转动副八r
33
、转动副九r
34
及转动副十三r
35
依次串联构成;移动副三p
31
设置于静平台0上,且为驱动副;移动副三p
31
的移动方向、转动副九r
34
的轴线及转动副十三r
35
的轴线均与y轴方向平行,转动副十二r
32
的轴线和转动副八r
33
的轴线均与x轴方向平行;转动副十三r
35
与右动平台1-1的右端连接;
66.一般支链二iii由移动副四p
41
、转动副十四r
42
、转动副十r
43
、转动副十一r
44
、转动副十五r
45
依次串联构成;移动副四p
41
设置于静平台0上,且为驱动副;移动副四p
41
的移动方向、转动副十一r
44
的轴线及转动副十r
45
的轴线均与y轴方向平行,转动副十四r
42
的轴线和转动副十r
43
的轴线均与x轴方向平行;转动副十五r
45
与左动平台1-2的左端连接。
67.本实施例中的一般支链一ii和一般支链二iii的拓扑结构相同。
68.本实施例中移动副一p
11
、移动副二p
21
、移动副三p
31
和移动副四p
41
的轴线方向相互平行,且为驱动副;这样,共享混合支链i、一般支链一ii、一般支链二iii这三条支链共同组成了一个动平台可重构、可折叠、输出为多种运动位姿的并联机构;
69.其中,一般支链一ii或一般支链二iii与共享混合支链i并联连接后,均可视为一个三自由度、零耦合度的独立并联机构单元,每个单元能产生沿o-yz平面内的两维平移以
及绕y轴的一维转动的输出运动,且具有符号式位置正解与部分运动解耦性。
70.当移动副一p
11
、移动副二p
21
、移动副三p
31
和移动副四p
41
驱动时,左右两侧独立的右动平台1-1及左动平台1-2能产生两平移一转动的输出运动,并能进行独立调节,以此由驱动副控制,改变右动平台1-1及左动平台1-2位置,实现动平台重构及多位姿输出,且结构简单、加工制造容易,控制方便,可广泛应用于工业生产中。
71.实施例3
72.如图3所示,实施例3与实施例1的区别在于:一般支链一ii由移动副三p
31
、转动副十二r
32
、转动副八r
33
、转动副九r
34
的轴线及转动副十三r
35
依次串联构成;移动副三p
31
设置于静平台0上,且为驱动副;移动副三p
31
的移动方向、转动副十二r
32
的轴线及转动副十三r
35
的轴线均与y轴方向平行,转动副八r
33
的轴线及转动副九r
34
的轴线均与x轴方向平行;转动副十三r
35
与右动平台1-1的右端连接;
73.一般支链二iii由移动副四p
41
、转动副十四r
42
、转动副十(r
43
)、转动副十一r
44
、转动副十五r
45
依次串联构成;移动副四p
41
设置于静平台0上,且为驱动副;移动副四p
41
的移动方向、转动副十四r
42
的轴线及转动副十五r
45
的轴线均与y轴方向平行,转动副十r
43
的轴线及转动副十一r
44
的轴线均与x轴方向平行;转动副十五r
45
与左动平台1-2的左端连接。
74.本实施例中的一般支链一ii和一般支链二iii的拓扑结构相同。
75.本实施例中移动副一p
11
、移动副二p
21
、移动副三p
31
和移动副四p
41
的轴线方向相互平行,且为驱动副;这样,共享混合支链i、一般支链一ii、一般支链二iii这三条支链共同组成了一个动平台可重构、可折叠、输出为多种运动位姿的并联机构;
76.其中,一般支链一ii或一般支链二iii与共享混合支链i并联连接后,均可视为一个三自由度、零耦合度的独立并联机构单元,每个单元能产生沿o-yz平面内的两维平移以及绕y轴的一维转动的输出运动,且具有符号式位置正解与部分运动解耦性。
77.当移动副一p
11
、移动副二p
21
、移动副三p
31
和移动副四p
41
驱动时,左右两侧独立的右动平台1-1及左动平台1-2能产生两平移一转动的输出运动,并能进行独立调节,以此由驱动副控制,改变右动平台1-1及左动平台1-2位置,实现动平台重构及多位姿输出,且结构简单、加工制造容易,控制方便,可广泛应用于工业生产中。
78.实施例4
79.如图4所示,实施例4与实施例1的区别在于:一般支链一ii为一条无约束支链,由移动副三p
31
、球副一s
32
和球副二s
33
依次串联组成;移动副三p
31
设置于静平台0上,且为驱动副;球副二s
33
连接右动平台1-1的右端;
80.一般支链二iii为一条无约束支链,由移动副四p
41
、球副三s
42
和球副四s
43
依次串联组成;移动副四p
41
设置于静平台0上,且为驱动副;球副四s
43
连接左动平台1-2的左端。
81.本实施例中的一般支链一ii和一般支链二iii的拓扑结构相同。
82.本实施例中移动副一p
11
、移动副二p
21
、移动副三p
31
和移动副四p
41
均为驱动副;这样,共享混合支链i、一般支链一ii、一般支链二iii这三条支链共同组成了一个动平台可重构、可折叠、输出为多种运动位姿的并联机构;
83.其中,一般支链一ii或一般支链二iii与共享混合支链i并联连接后,均可视为一个三自由度、零耦合度的独立并联机构单元,每个单元能产生沿o-yz平面内的两维平移以及绕y轴的一维转动的输出运动,且具有符号式位置正解与部分运动解耦性。
84.当移动副一p
11
、移动副二p
21
、移动副三p
31
和移动副四p
41
驱动时,左右两侧独立的右动平台1-1及左动平台1-2能产生两平移一转动的输出运动,并能进行独立调节,以此由驱动副控制,改变右动平台1-1及左动平台1-2位置,实现动平台重构及多位姿输出,且结构简单、加工制造容易,控制方便,可广泛应用于工业生产中。
85.实施例5
86.如图5所示,实施例5与实施例1的区别在于:一般支链一ii由移动副三p
31
、转动副十二r
32
、转动副八r
33
、转动副九r
34
及转动副十三r
35
依次串联构成;移动副三p
31
设置于静平台0上,且为驱动副;移动副三p
31
的移动方向、转动副九r
34
的轴线及转动副十三r
35
的轴线均与y轴方向平行,转动副十二r
32
的轴线和转动副八r
33
的轴线均与x轴方向平行;转动副十三r
35
与右动平台1-1的右端连接;
87.一般支链二iii由移动副四p
41
、平行四边形机构二、转动副十r
43
和转动副十一r
44
依次串联构成;平行四边形机构二均由轴线相互平行的转动副ara、转动副brb、转动副crc及转动副drd依次串联组成,转动副ara的轴线与x轴方向平行;转动副ara与转动副brb之间的连杆为下连杆,转动副crc及转动副drd之间的连杆为上连杆;移动副四p
41
和平行四边形机构二的下连杆固定连接,平行四边形机构二的上连杆和转动副十r
43
固定连接,转动副十一r
44
与左动平台1-2的左端连接;移动副四p
41
的移动方向、转动副十r
43
的轴线及转动副十一r
44
的轴线均与y轴方向平行;移动副四p
41
设置于静平台0上,且为驱动副。
88.本实施例中的一般支链一ii和一般支链二iii的拓扑结构不同,值得注意的是,实施例1或2或3或4中的一般支链一ii和一般支链二iii可以相互替换与组合,例如,实施例1中的一般支链一ii可用实施例2或3或4中的一般支链一ii替换,而保持实施例1中的一般支链二iii不变。
89.本实施例中移动副一p
11
、移动副二p
21
、移动副三p
31
和移动副四p
41
均为驱动副;这样,共享混合支链i、一般支链一ii、一般支链二iii这三条支链共同组成了一个动平台可重构、可折叠、输出为多种运动位姿的并联机构;
90.其中,一般支链一ii或一般支链二iii与共享混合支链i并联连接后,均可视为一个三自由度、零耦合度的独立并联机构单元,每个单元能产生沿o-yz平面内的两维平移以及绕y轴的一维转动的输出运动,且具有符号式位置正解与部分运动解耦性。
91.当移动副一p
11
、移动副二p
21
、移动副三p
31
和移动副四p
41
驱动时,左右两侧独立的右动平台1-1及左动平台1-2能产生两平移一转动的输出运动,并能进行独立调节,以此由驱动副控制,改变右动平台1-1及左动平台1-2位置,实现动平台重构及多位姿输出,且结构简单、加工制造容易,控制方便,可广泛应用于工业生产中。
92.实施例6
93.如图6所示,实施例6与实施例1的区别在于:一般支链一ii由移动副三p
31
、转动副十二r
32
、转动副八r
33
、转动副九r
34
及转动副十三r
35
依次串联构成;移动副三p
31
设置于静平台0上,且为驱动副;移动副三p
31
的移动方向、转动副十二r
32
的轴线及转动副十三r
35
的轴线均与y轴方向平行,转动副八r
33
的轴线及转动副九r
34
的轴线均与x轴方向平行;转动副十三r
35
与右动平台1-1的右端连接;
94.一般支链二iii由移动副四p
41
、转动副十四r
42
、转动副十r
43
、转动副十一r
44
、转动副十五r
45
依次串联构成;移动副四p
41
设置于静平台0上,且为驱动副;移动副四p
41
的移动方
向、转动副十一r
44
的轴线及转动副十五r
45
的轴线均与y轴方向平行,转动副十四r
42
的轴线和转动副十r
43
的轴线均与x轴方向平行;转动副十五r
45
与左动平台1-2的左端连接。
95.本实施例中的一般支链一ii和一般支链二iii的拓扑结构不同。
96.本实施例中移动副一p
11
、移动副二p
21
、移动副三p
31
和移动副四p
41
均为驱动副;这样,共享混合支链i、一般支链一ii、一般支链二iii这三条支链共同组成了一个动平台可重构、可折叠、输出为多种运动位姿的并联机构;
97.其中,一般支链一ii或一般支链二iii与共享混合支链i并联连接后,均可视为一个三自由度、零耦合度的独立并联机构单元,每个单元能产生沿o-yz平面内的两维平移以及绕y轴的一维转动的输出运动,且具有符号式位置正解与部分运动解耦性。
98.当移动副一p
11
、移动副二p
21
、移动副三p
31
和移动副四p
41
驱动时,左右两侧独立的右动平台1-1及左动平台1-2能产生两平移一转动的输出运动,并能进行独立调节,以此由驱动副控制,改变右动平台1-1及左动平台1-2位置,实现动平台重构及多位姿输出,且结构简单、加工制造容易,控制方便,可广泛应用于工业生产中。
99.上述依据本发明的理想实施例为启示,通过上述的说明内容,相关工作人员完全可以在不偏离本项发明技术思想的范围内,进行多样的变更以及修改。本项发明的技术性范围并不局限于说明书上的内容,必须要根据权利要求范围来确定其技术性范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1