一种搬运机器人的制作方法
本发明涉及工业机器人,尤其涉及一种搬运机器人。
背景技术:
1、目前国内工厂中存在许多大负荷工件的搬运、码垛、装配任务,然而目前工业机器人系统最大负载仅为2吨以内,无法满足该种需求。暂行的解决方案为人工操作吊车来完成,耗时耗力,效率低下。
2、随着工业自动化技术的不断进步,工业机器人系统在工业实际生产中的作用日益突出,因此我们需要一种解决目前工厂大负荷工件的搬运、码垛、装配任务的大负载机器人。
技术实现思路
1、有鉴于此,本发明提供一种大负载机器人,解决目前工厂大负荷工件的搬运、码垛、装配任务,负载可达4-5吨之间,具有较大的作业范围。运用本大负载机器人将大大降低工人的劳动强度,提高生产效率,改善产品质量。
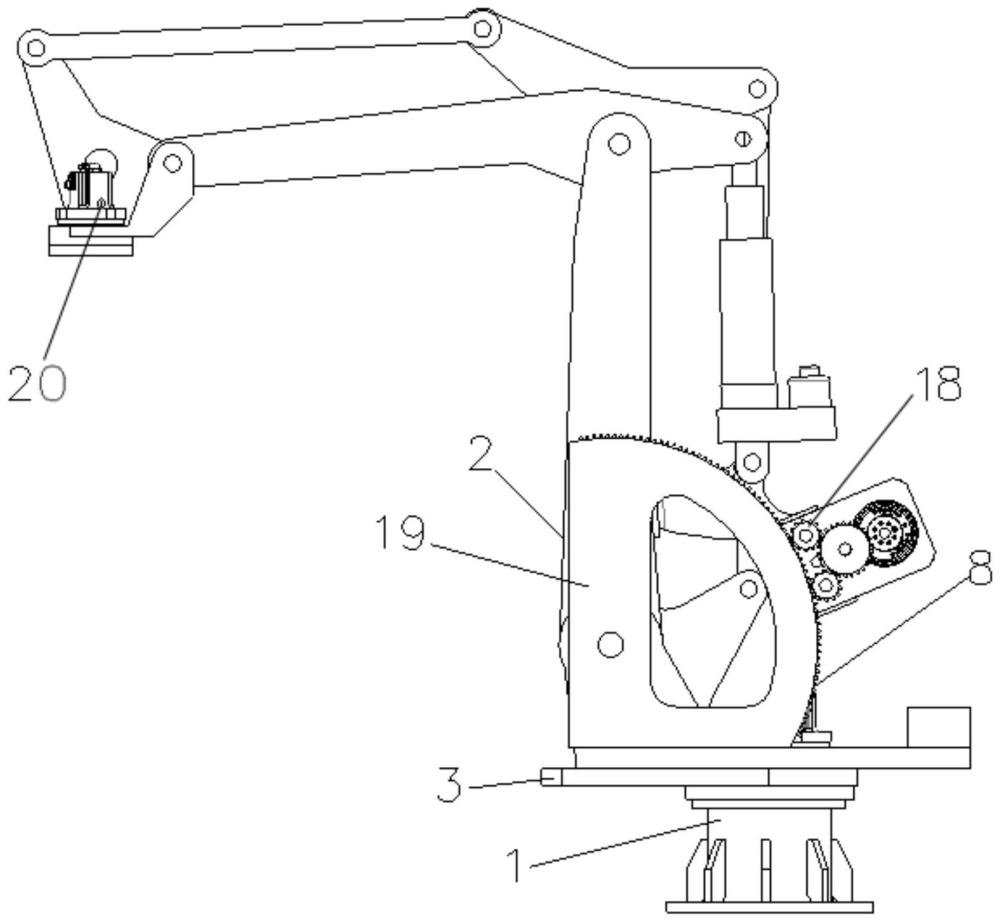
2、本发明采用的技术方案为:一种搬运机器人,包括基座总成,所述基座总成上端旋转连接有机械臂总成;
3、所述机械臂总成包括臂座、大臂和小臂;所述大臂下端与臂座转动连接,大臂上端与小臂的中部和三角支撑关节的下端转动连接;所述小臂的一端与连接臂转动连接
4、所述臂座一侧设有弧形齿条;大臂一侧设置安装板,安装板上固定有电机;电机的输出轴通过传动齿轮与弧形齿条啮合;
5、所述安装板顶部与伺服电缸一端转动连接;所述伺服电缸另一端与小臂远离连接臂的一端转动连接;
6、所述三角支撑关节靠近伺服电缸的一端与第一连杆的一端转动连接;所述第一连杆的另一端与臂座转动连接;
7、所述三角支撑关节远离伺服电缸的一端与第二连杆的一端转动连接;第二连杆的另一端与连接臂的上端转动连接。
8、进一步地,所述臂座一侧设有直角扇形固定座,直角扇形固定座的圆弧上设置有弧形齿条。
9、进一步地,所述基座总成上端远离机械臂总成一侧设有配重装置。
10、进一步地,所述连接臂上安装有工具安装法兰盘。
11、进一步地,所述工具安装法兰盘上安装有伺服旋转电机。
12、本发明有益的技术效果在于:本发明的大负载机器人,与现有最大的工业机器人相比负载更大,最大可负载4.5吨,可以胜任工件重量更大的场景。且通过机械臂总成的作用,本发明的大负载机器人最大臂展长度可达4.5米,最大码垛高度可达到3.9米。且整体结构安全紧凑,便于控制,易于实现。
技术特征:
1.一种搬运机器人,包括基座总成(1),所述基座总成(1)上端旋转连接有机械臂总成(4);其特征在于:
2.根据权利要求1所述的搬运机器人,其特征在于:所述臂座(5)一侧设有直角扇形固定座(19),所述直角扇形固定座(19)的圆弧上设置有弧形齿条(8)。
3.根据权利要求1所述的搬运机器人,其特征在于:所述基座总成(1)上端远离机械臂总成(4)一侧设有配重装置(16)。
4.根据权利要求1所述的搬运机器人,其特征在于:所述连接臂(12)上安装有工具安装法兰盘(11)。
5.根据权利要求4所述的搬运机器人,其特征在于:所述工具安装法兰盘(11)上安装有伺服旋转电机(20)。
技术总结
本发明涉及工业机器人技术领域,尤其涉及一种搬运机器人。包括基座总成和机械臂总成;机械臂总成包括臂座、大臂和小臂;大臂下端与臂座转动连接,大臂上端与小臂的中部和三角支撑关节的下端转动连接;小臂的一端与连接臂转动连接;臂座一侧设有弧形齿条;大臂一侧设置安装板,安装板上固定有电机;电机的输出轴与弧形齿条啮合;安装板顶部与伺服电缸一端转动连接;伺服电缸另一端与小臂远离连接臂的一端转动连接。与现有最大的工业机器人相比负载更大,最大可负载4.5吨,可以胜任工件重量更大的场景。且通过机械臂总成的作用,本发明的大负载机器人最大臂展长度可达4.5米,最大码垛高度可达到3.9米。结构安全紧凑,便于控制。
技术研发人员:曹俊标,吕良伟,孟飙
受保护的技术使用者:曹俊标
技术研发日:
技术公布日:2024/3/24
- 还没有人留言评论。精彩留言会获得点赞!