软体肌肉、传动结构、机器人以及软体肌肉的制造方法与流程
本技术涉及机器人领域,特别涉及一种软体肌肉、传动结构、机器人以及软体肌肉的制造方法。
背景技术:
1、目前真正能够工业化批量生产投入使用的机器人和机械手臂绝大多数为刚性结构。
2、学术界和少数企业的基础研究对于柔性机械手臂和机器人有一些研究和进展,柔性机械手臂和机器人的核心构成是柔性致动器。柔性致动的方式有很多种,例如可以包括:全部或部分采用弹性件;使用拉绳等柔性件传动;利用特殊电磁特性的材料在电场或磁场中产生的形变;利用对光照或温度敏感的材料在不同光照或温度下产生的形变;在封闭腔体中通过化学反应改变内容物的温度体积等特性以产生形变,其中机械能流体致动是相对成熟的技术方向。
3、在此需要说明的是,该背景技术部分的陈述仅提供与本技术有关的背景技术,并不必然构成现有技术。
技术实现思路
1、本技术提供一种软体肌肉、传动结构、机器人以及软体肌肉的制造方法,以提高软体肌肉的能量转换效率。
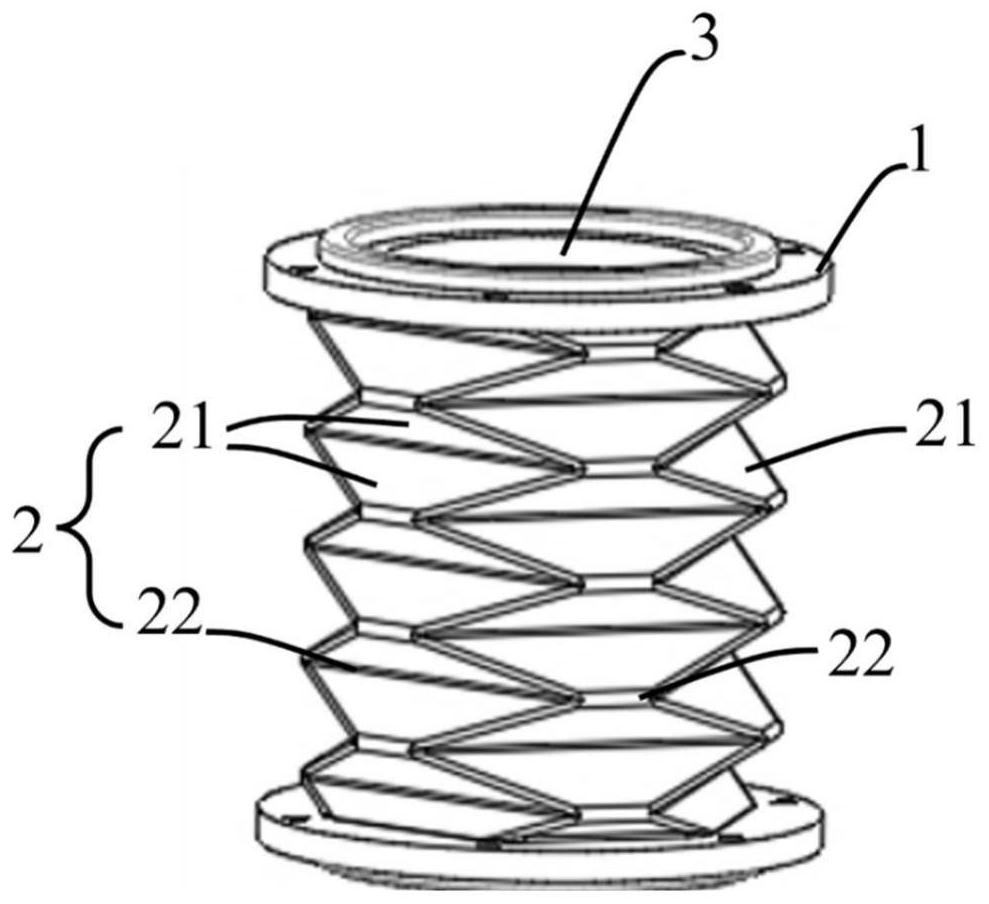
2、本技术第一方面提供一种软体肌肉,包括两个端面、柔性侧壁以及开口。柔性侧壁与两个端面围合形成具有中心轴线的筒状的腔体。柔性侧壁被设计成或包括多层折叠结构。每一层折叠结构均具有折叠面。相邻两层折叠结构的折叠面的连接处形成折痕面。折痕面包括一条或多条折痕,相邻两层折叠面与折痕面之间的夹角被定义为侵入角θ。开口设置在柔性侧壁上或端面上。开口用于使流体进出腔体以改变腔体的内外压差并使折叠结构压缩或伸展以驱动软体肌肉的端面移动。其中,软体肌肉在初始状态下具有初始侵入角θp,并且在折叠结构的压缩或伸展过程中侵入角θ在0°至最大侵入角θmax之间变化。其中,软体肌肉的初始侵入角θp和最大侵入角θmax被配置为满足如下关系式:0.6θmax<θp<0.8θmax,且15°≤θmax≤45°。
3、在一些实施例中,在初始状态下,多层折痕面中的相邻两层之间的距离为h。柔性侧壁的壁厚为t。其中,距离h、壁厚t以及初始侵入角θp被配置为满足如下关系式:0.05h/sinθp<t<0.2h/sinθp。
4、在一些实施例中,折叠面与中心轴线间的最大距离为d1,折叠面与中心轴线间的最小距离为d2。软体肌肉具有侵入深度系数a,侵入深度系数a、最大距离d1和最小距离d2被配置为满足如下关系式:a=(d1-d2)/r。其中,r为软体肌肉的半径,软体肌肉的半径r被定义为一个或多个折痕依次连接形成的图形的最小外接圆的半径。最大距离d1和最小距离d2被配置为使得软体肌肉的侵入深度系数a>0.2。
5、在一些实施例中,相邻两层折叠结构的各个折叠面的连接处形成的多个折痕在周向方向上依次连接形成多边形。
6、在一些实施例中,多边形包括四边形,且侵入深度系数a被配置为满足如下关系式:0.2<a<0.8。
7、在一些实施例中,相邻两层四边形中的一层的中轴线和另一层的中轴线的之间的夹角为90°。
8、在一些实施例中,多边形包括六边形,且侵入深度系数a被配置为满足如下关系式:0.2<a<0.5。
9、在一些实施例中,相邻两层六边形中的一层的中轴线和另一层的中轴线的之间的夹角为60°。
10、在一些实施例中,六边形中的一半的边长度相同并形成六边形的长边,六边形中的另一半的边长度相同并形成六边形的短边。六边形的短边的中心角β被配置为满足如下关系式:a=cosβ-cos(60°-β)。
11、在一些实施例中,柔性侧壁的壁厚t还被配置为满足如下关系式:t<(r*sinβ)/3。其中,β为多边形中较短的边对应的中心角的一半。
12、在一些实施例中,多个折痕中的一半的长度相同并形成多边形的长边。多个折痕中的另一半的长度相同并形成多边形的短边。
13、在一些实施例中,多边形的长边的长度与短边的长度的比值被设定成大于2。
14、在一些实施例中,在初始状态下,多层折痕面中的相邻两层之间的距离相同且均为h。
15、在一些实施例中,相邻两层折叠结构的各个折叠面的连接处形成的折痕在周向方向上形成闭合曲线,并且软体肌肉的侵入深度系数a被配置为满足如下关系式:0.2<a<0.4。
16、在一些实施例中,软体肌肉的最大侵入角θmax被配置为满足如下关系式:27°<θmax<42°。
17、在一些实施例中,在折叠结构的压缩或伸展过程中,软体肌肉的折叠面的面积变化率σδ满足如下关系式:0.001<σδ<0.03。其中,面积变化率
18、在一些实施例中,软体肌肉还包括连接部。连接部设置在软体肌肉的端面上。连接部的轴向尺寸t1和径向尺寸t2被配置为满足如下关系式:t<t1<6t,a*r<t2<1.5a*r。其中t为柔性侧壁的壁厚,软体肌肉的半径为r。
19、在一些实施例中,连接部一体成型在软体肌肉的端面上。
20、在一些实施例中,软体肌肉还包括支撑件。支撑件设置在软体肌肉的腔体内的靠近端面位置处。支撑件的形状与连接部的形状适配。支撑件和连接部中的一者具有第一定位部,支撑件和连接部中的另一者具有形状适配的第二定位部。第一定位部和第二定位部形成凹凸配合。第一定位部和第二定位部在轴向和径向中至少一个方向的最大尺寸t3被配置为满足如下关系式:2t<t3。
21、在一些实施例中,软体肌肉在初始状态下的初始高度为h并且软体肌肉的最大半径为r。软体肌肉的初始高度h与最大半径r被配置为满足如下关系式:h/r<4。
22、在一些实施例中,软体肌肉的初始高度h与最大半径r被配置为满足如下关系式:0.6<h/r<3。
23、在一些实施例中,相邻两层折叠结构的折叠面通过折痕连接的位置处设置有倒角。
24、在一些实施例中,倒角的半径为r,并且倒角的半径r与柔性侧壁的壁厚t满足如下关系式:r<0.5t。
25、在一些实施例中,软体肌肉还包括加强筋。加强筋设置在腔体内且位于向腔体内凹的折痕处。加强筋的径向尺寸t4和轴向尺寸t5被配置为满足如下关系式:t5<t4<10t,t<t5<2t,其中t为柔性侧壁的壁厚。
26、在一些实施例中,软体肌肉的腔体的中心轴线的曲率为0,并且各个折痕面之间的距离相同。
27、在一些实施例中,软体肌肉的腔体的中心轴线的曲率大于0,并且各个折痕面之间的夹角相同。
28、在一些实施例中,至少一层折叠结构的折叠面具有预定的弯曲轮廓。弯曲轮廓呈三角函数曲线走向或样条曲线走向。
29、在一些实施例中,在折叠结构的压缩或伸展过程中,折叠结构的折叠面具有均匀的应变分布。
30、在一些实施例中,位于折痕面两侧的两个折叠面形状相同且关于折痕面对称。
31、在一些实施例中,软体肌肉的制备材料被配置为满足如下关系:拉伸强度大于9mpa,邵氏硬度大于80,回弹性大于30%。
32、本技术第二方面提供一种软体肌肉,包括两个端面、柔性侧壁以及开口。柔性侧壁与两个端面围合形成具有中心轴线的筒状的腔体。柔性侧壁被设计成或包括多层折叠结构。其中,多层折叠结构包括带有折叠面且依次相邻的第一层折叠结构和第二层折叠结构。并且在第一层折叠结构与第二层折叠结构之间形成带有至少一条折痕的第一折痕面。第一层折叠结构的折叠面与第二层折叠结构的轴向相邻的折叠面被配置为关于第一折痕平面对称布置,并且相应的折叠面与第一折痕平面之间的夹角被定义为侵入角θ。其中,折叠面与中心轴线间的最大距离为d1,折叠面与中心轴线间的最小距离为d2。软体肌肉具有侵入深度系数a,侵入深度系数a、最大距离d1和最小距离d2被配置为满足如下关系式:a=(d1-d2)/r。其中,r为软体肌肉的半径,软体肌肉的半径r被定义为一个或多个折痕22依次连接形成的图形的最小外接圆的半径。最大距离d1和最小距离d2被配置为使得侵入深度系数0.2<a<0.8。开口设置在柔性侧壁上或端面上。开口用于使流体进出腔体以改变腔体的内外压差并使折叠结构压缩或伸展以驱动软体肌肉的端面移动。软体肌肉在初始状态下具有初始侵入角θp,并且在折叠结构的压缩或伸展过程中侵入角θ在0°至最大侵入角θmax之间变化。其中,软体肌肉的初始侵入角θp和最大侵入角θmax被配置为满足如下关系式:0.6θmax<θp<0.8θmax,且15°≤θmax≤45°。
33、在一些实施例中,多层折叠结构包括带有折叠面的与第二层折叠结构相邻的第三层折叠结构。在第二层折叠结构与第三层折叠结构之间形成带有至少一条折痕的第二折痕面。第二层折叠结构的折叠面与第三层折叠结构的轴向相邻的折叠面被配置为关于第二折痕面对称布置。
34、在一些实施例中,软体肌肉的腔体的中心轴线构成为直线,并且第一折痕面和第二折痕面之间的距离为定值。
35、在一些实施例中,软体肌肉的腔体的中心轴线构成为弧线,并且第一折痕面和第二折痕面之间的角度为定值。
36、在一些实施例中,在初始状态下,第一折痕面和第二折痕面之间的距离为h。柔性侧壁的壁厚为t。其中,距离h、壁厚t以及初始侵入角θp被配置为满足如下关系式:0.05h/sinθp<t<0.2h/sinθp。
37、在一些实施例中,柔性侧壁的壁厚t还被配置为满足如下关系式:t<(r*sinβ)/3。其中,β为多边形中较短的边对应的中心角的一半。
38、本技术第三方面提供一种传动结构。传动结构包括端板以及并列布置的至少两个如上所述的软体肌肉。端板设置在至少两个软体肌肉的两端。至少两个软体肌肉的中心轴线平行。在初始状态下,相同端的端板处于同一平面内,且端板与软体肌肉之间固定连接。
39、在一些实施例中,传动结构还包括连通件。
40、本技术第四方面提供一种传动结构。传动结构包括推板、端板以及偶数个轴向排列的如上所述的软体肌肉。软体肌肉的中心轴线共线。推板设置在轴向排列的两个软体肌肉之间。端板设置在轴向排列的两个软体肌肉的远离推板的另一端。端板与软体肌肉之间固定连接,推板上有螺接件,螺接件中有螺杆穿过。
41、在一些实施例中,传动结构还包括连通件。
42、本技术第五方面提供一种机器人,包括如上所述的软体肌肉或传动结构。
43、本技术第六方面提供一种软体肌肉的制造方法,包括如下步骤:提供浇注模具;将制备材料液化并浇注入模具内;以及加热模具,以使如上所述的软体肌肉成型。
44、在一些实施例中,加热模具包括将模具加热至大于180℃。
45、在一些实施例中,软体肌肉的制造方法还包括在软体肌肉成型后,在软体肌肉的外侧喷涂高分子材料涂层。
46、基于本技术提供的技术方案,软体肌肉包括两个端面、柔性侧壁以及开口。柔性侧壁与两个端面围合形成具有中心轴线的筒状的腔体。柔性侧壁被设计成或包括多层折叠结构。每一层折叠结构均具有折叠面。相邻两层折叠结构的折叠面的连接处形成折痕面。折痕面包括一条或多条折痕。相邻两层折叠面与折痕之间的夹角被定义为侵入角θ。开口设置在柔性侧壁上或端面上。开口用于使流体进出腔体以改变腔体的内外压差并使折叠结构压缩或伸展以驱动软体肌肉的端面移动。其中,软体肌肉在初始状态下具有初始侵入角θp,并且在折叠结构的压缩或伸展过程中侵入角θ在0°至最大侵入角θmax之间变化。软体肌肉的初始侵入角θp和最大侵入角θmax被配置为满足如下关系式:0.6θmax<θp<0.8θmax,且15°≤θmax≤45°。
47、通过本技术一些实施例提供的软体肌肉,可以实现内外压差δp与端面输出力成线性关系,并且软体肌肉在折叠或伸展过程中,主要涉及的是折叠面的折叠,软体肌肉本身的面积变化很小。换言之,进入腔体内的流体的能量主要用于使折叠结构发生折叠或伸缩,折叠结构本身的应变可以很小。在一些有利的实施例中,折叠结构本身的内应力很小,因此流体的能量中只有很小比例的部分用于克服折叠结构自身发生形变而产生的应力,进而该软体肌肉的能量转换效率高。在一些有利的实施例中,该软体肌肉在变形过程中,小应变均匀分布在整个折叠面上,使得该软体肌肉相比现有的其他软体肌肉,能承受或输出更大的载荷,经受更多次数的压缩和伸展,拥有更长的使用寿命。
48、通过以下参照附图对本技术的示例性实施例的详细描述,本技术的其它特征及其优点将会变得清楚。
- 还没有人留言评论。精彩留言会获得点赞!