一种机械手的制作方法
本发明涉及机械自动化,具体涉及一种机械手。
背景技术:
1、机械手即能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置。
2、ppu凸轮机械手是常见的一种高速拾放移动机械手,如中国实用新型专利cn206825404u公开的ppu旋转式机械手、中国发明专利申请cn112296980a公开的一种ppu高速拾放移动机械手。
3、现有常规ppu机械手通常包括固定背板、电机、轨迹板、扭力臂、轴承,轴承设置在轨迹板的凸轮槽(通常为门型槽)内,能沿凸轮槽活动,扭力臂一端连接电机,另一端形成直线槽,并套设在轴承外,轴承连接机械臂,其基本工作原理是由电机驱动扭力臂旋转,扭力臂能够拨动轴承在凸轮槽内滑动,轴承则带动机械臂沿轨道动作。
4、但是现有ppu机械手存在以下几点不足:
5、1、轴承需要在凸轮槽与直线槽内活动,因此轴承与凸轮槽、直线槽之间必然存在间隙以保证高速运动且避免卡死,这2个间隙的存在,导致ppu机械手动作精度不高,无法满足高精度的工作要求,而且轴承容易与凸轮槽、直线槽的侧壁产生来回碰撞,特别是来回换向时,必然会产生相互碰撞,从而影响使用寿命;
6、2、电机驱动扭力臂旋转,扭力臂拨动轴承动作,负载能力小,而且电机是1∶1传递力矩的,因此通常情况下需要额外设置减速机以增加力矩,成本高。
技术实现思路
1、为了克服背景技术的不足,本发明提供一种机械手。
2、本发明所采用的技术方案:一种机械手,包括固定背板、动力源、主轴、摆线轮、摆线框、联动轴;所述动力源安装在固定背板背面,其输出轴驱动连接主轴,并与主轴偏心设置;所述摆线轮套设在主轴外,并与主轴旋转配合,所述摆线轮外边缘均布有若干摆线轴承;所述摆线框固定设置在固定背板正面,所述摆线框内壁对应摆线轴承的位置形成有摆线轮廓曲面,所述摆线轴承与摆线轮廓曲面相贴合形成滚动配合;所述联动轴一端穿过其中一个摆线轴承中心设置。
3、所述摆线轮廓曲面的轮廓呈圆角方形。
4、所述摆线轴承设有3个。
5、所述摆线框上还设有盖板,所述联动轴穿出盖板,且所述盖板上形成有供联动轴活动的让位槽。
6、所述让位槽呈门字形。
7、所述主轴包括主轴体以及设置在主轴体两端的偏心轴体,所述主轴体与摆线轮旋转配合,两端的偏心轴体分别与固定背板、盖板旋转配合。
8、所述主轴体、偏心轴体为均套设有轴承。
9、所述固定背板上设有导轨总成,所述联动轴与导轨总成连接,导轨总成与摆线轮联动配合。
10、所述导轨总成包括x轴导轨、x轴活动件、连接块、z轴导轨、z轴活动件;所述x轴导轨固定安装在固定背板上,所述x轴活动件滑动设置在x轴导轨上,能沿x轴方向往复滑移,所述z轴导轨通过连接块与x轴活动件固定连接,所述z轴活动件滑动设置在z轴导轨上,能沿z轴方向往复滑移,所述z轴导轨与联动轴活动连接。
11、本发明的有益效果是:上述机械手利用摆线原理运行动作,动力源驱动主轴偏心旋转,使得摆线轮能够在摆线框内沿摆线轮廓曲面做摆线运动,摆线轮则能够带动联动轴沿摆线轮廓曲面轨迹同步运行,摆线轮在运动过程中,其摆线轴承始终与摆线轮廓曲面相贴合,多点支撑,结构稳定且承载能力强,同时联动轴的运行轨迹由摆线轮与摆线框动作决定,摆线轴承与摆线轮廓曲面之间无间隙,不仅动作精度更高,而且动作过程中不会出现相互撞击损坏的问题,使用寿命高,另外摆线轮自带减速效果,无需额外设置减速机也能够提供足够的驱动力,可进一步降低成本。
技术特征:
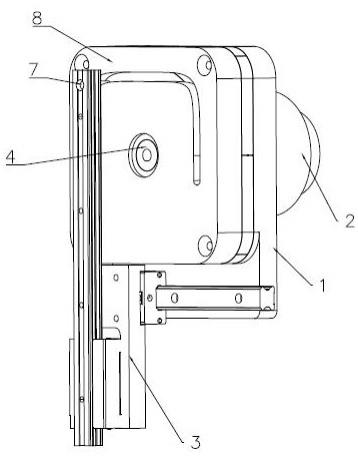
1.一种机械手,包括固定背板(1)、动力源(2);其特征在于:还包括主轴(4)、摆线轮(5)、摆线框(6)、联动轴(7);
2.根据权利要求1所述的机械手,其特征在于:所述摆线轮廓曲面(61)的轮廓呈圆角方形。
3.根据权利要求1或2所述的机械手,其特征在于:所述摆线轴承(51)设有3个。
4.根据权利要求1所述的机械手,其特征在于:所述摆线框(6)上还设有盖板(8),所述联动轴(7)穿出盖板(8),且所述盖板(8)上形成有供联动轴(7)活动的让位槽(81)。
5.根据权利要求4所述的机械手,其特征在于:所述让位槽(81)呈门字形。
6.根据权利要求4所述的机械手,其特征在于:所述主轴(4)包括主轴体(41)以及设置在主轴体(41)两端的偏心轴体(42),所述主轴体(41)与摆线轮(5)旋转配合,两端的偏心轴体(42)分别与固定背板(1)、盖板(8)旋转配合。
7.根据权利要求6所述的机械手,其特征在于:所述主轴体(41)、偏心轴体(42)外均套设有轴承。
8.根据权利要求1所述的机械手,其特征在于:所述固定背板(1)上设有导轨总成(3),所述联动轴(7)与导轨总成(3)连接,导轨总成(3)与摆线轮(5)联动配合。
9.根据权利要求8所述的机械手,其特征在于:所述导轨总成(3)包括x轴导轨(31)、x轴活动件(32)、连接块(33)、z轴导轨(34)、z轴活动件(35);所述x轴导轨(31)固定安装在固定背板(1)上,所述x轴活动件(32)滑动设置在x轴导轨(31)上,能沿x轴方向往复滑移,所述z轴导轨(34)通过连接块(33)与x轴活动件(32)固定连接,所述z轴活动件(35)滑动设置在z轴导轨(34)上,能沿z轴方向往复滑移,所述z轴导轨(34)与联动轴(7)活动连接。
技术总结
一种机械手,其特征在于:还包括主轴、摆线轮、摆线框、联动轴;动力源安装在固定背板背面,其输出轴驱动连接主轴,并与主轴偏心设置;摆线轮套设在主轴外,并与主轴旋转配合,摆线轮外边缘均布有若干摆线轴承;摆线框固定设置在固定背板正面,摆线框内壁对应摆线轴承的位置形成有摆线轮廓曲面,摆线轴承与摆线轮廓曲面相贴合形成滚动配合;联动轴一端穿过其中一个摆线轴承中心设置。上述方案利用摆线原理运行动作,具有结构稳定、承载能力强、动作精度更高、使用寿命高、成本低等有益效果。
技术研发人员:陈涵
受保护的技术使用者:温州市日康机械科技厂
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!