一种少输入的绳驱动变刚度七自由度机械臂
1.本发明属于机械技术领域,具体来说是一种少输入的绳驱动变刚度七自由度机械臂。
背景技术:
2.绳驱动机械臂具有重量轻、布置方式灵活多样、工作空间大、柔顺性好以及高动态特性等优点,可以很大程度上减小设备运动过程中的惯量,使得设备具有更轻的质量、更快的响应速度,广泛用于各种应用场景下的抓取等任务。由于绳索的单向受力特性,绳索数量大于机构自由度,进而使得驱动控制系统变得较为复杂。为了尽量减少驱动控制系统的复杂程度,需要根据不同的任务需求进行耦合驱动机构的设计,降低驱动的维数,实现较少数量的驱动输入控制较多自由度机械臂的运动。除此之外,为了提高机械臂的柔顺性,还需要其刚度可以主动调控。因此,需要进行一种少输入的绳驱动变刚度七自由度机械臂的设计。
技术实现要素:
3.针对上述问题,本发明提出了一种少输入的绳驱动变刚度七自由度机械臂,通过10根绳索控制机械臂七个关节自由度的运动,通过耦合驱动组件,实现仅用四个电机即可对10根绳索的运动进行控制,且还能通过调节绳索张力实现机械臂刚度的调控。
4.本发明少输入的绳驱动变刚度七自由度机械臂,包括基座、七自由度机械臂、耦合驱动组件于独立绳驱动机构。
5.所述基座侧部吊装七自由度机械臂,肩关节两自由度转动组件、肩关节单自由度转动组件、大臂、肘关节转动组件、小臂、腕关节两自由度转动组件、腕关节单自由度转动组件与手掌。
6.肩关节两自由度转动组件周向上安装有三个变刚度装置,其中两个变刚度装置端部绳索接入耦合驱动组件。
7.所述肩关节单自由度转动组件固定于肩关节两自由度转动组件下部,肩关节单自由度转动组件中具有与大臂同轴的绕线盘,绕线盘上缠绕由正反向驱动绳,正反向驱动绳接入耦合驱动组件;肩关节单自由度转动组件中绕线盘同轴连接大臂。
8.所述肘关节转动组件固定于大臂下部,具有轴线与大臂垂直的绕线盘,绕线盘上缠绕有正反向驱动绳,正反向驱动绳接入耦合驱动组件。肘关节转动组件的绕线盘通过连接件连接小臂。
9.所述腕关节两自由度转动组件与肩关节两自由度转动组件结构相同,腕关节两自由度转动组件上部固定连接小臂,腕关节两自由度转动组件下部固定腕关节单自由度转动组件固连。腕关节两自由度转动组件中两个变刚度装置端部绳索接入耦合驱动组件。
10.所述腕关节单自由度转动组件与肩关节单自由度转动组件结构相同,腕关节单自由度转动组件中绕线盘底面安装手掌。腕关节单自由度转动组件中的正反向驱动绳接入耦合驱动组件。
11.所述耦合驱动组件包含上部电机、上电机安装座、上线轮组、上线轮组安装座、下部电机、下电机安装座、下线轮组、下线轮组安装座、导轮组、前导轮安装座、后导轮安装座、导杆基座、导杆、移动轮、正向绳索、反向绳索与驱动绳。
12.其中,上部电机与下部电机分别通过上电机安装座及下电机安装座安装于基座上,使两个电机转轴平行于水平面设置。上部电机输出轴同轴连接上线轮组与下线轮组;上线轮组与下线轮组轴向上具有10个绕线圆盘。
13.所述导轮组位于上线轮组与下线轮组之间位置,安装于基座上。导轮组包括前侧上下排列的两个前导轮组,以及后侧上下排列的两个后导轮组。其中,两个前部导轮组与两个后导轮组结构尺寸相同,均为导轮轴上固定安装的10个等尺寸导轮。两个前导轮组与两个后导轮组中各个导轮分别与上线轮组和下线轮组中10个绕线圆盘轴向位置对应。
14.上述左右两个前导轮安装座与后导轮安装座上分别安装有导杆基座。同时前后两个导杆基座上沿左右方向等间隔开有位置相互对称的20个通孔。每组位置相对的通孔分别与一根导杆两端插接固定,则前导轮安装座与后导轮安装座间沿左右方向共20根导杆;且两根导杆为一组,每组导杆穿过轴线沿左右方向设置的移动轮两侧的轴孔。各移动轮周向位置与上线轮组和下线轮组中个绕线圆盘轴向位置对应。
15.上述轴向位置对应的上线轮组的绕线圆盘、下线轮组的绕线圆盘、前导轮安装座的导轮、后导轮安装组的导轮以及移动轮间,缠绕有导轮正向绳索或导轮反向绳索。
16.其中,导轮正向绳索一端与上线轮组中的绕线圆盘固连,缠绕于该绕线圆盘,随后向后导轮安装组方向绕过后导轮安装组中上方导轮后折返绕过移动轮中的绕线槽,再次折返绕过后导轮安装组中下方导轮,最终缠绕于下线轮组中的绕线圆盘,并与其固连。
17.导轮反向绳索一端与上线轮组中的绕线圆盘固连,其缠绕方向与正向绳索相反,依次绕过绕线圆盘、导轮、移动轮、导轮,再回到下线轮组中的一个绕线圆盘,并与其固连。
18.上述10个移动轮分别与机械臂中的根驱动绳连接,分别包括肩关节两自由度转动组件处两根绳索、肩关节单自由度转动组件处两根驱动绳、肘关节转动组件处两根驱动绳、腕关节两自由度转动组件处两根绳索、腕关节单自由度转动组件处两根驱动绳。
19.所述独立绳驱动组件共有两套结构相同,均包含独立电机、独立电机安装座、独立绳绕线盘、顶部支座、独立绳、导向座。其中,独立电机安装于独立电机安装座上;独立绳绕线盘与电机转轴同轴相连,两端分别安装在固定于横梁上的顶部支座上。两套独立绳驱动组件中的独立绳绕线盘上分别用来缠绕前述未与耦合驱动组件相连的两根绳索,包括肩关节两自由度转动组件处剩余的一根绳索以及腕关节两自由度转动组件处剩余的一根驱动绳。两根驱动绳缠绕于两个独立绳绕线盘上;通过独立电机转动带动独立绳绕线盘运动,进而使得独立绳在其上缠绕;控制独立电机扭矩,调节独立绳上拉力,进而改变肩关节两自由度转动组件和腕关节两自由度转动组件中驱动绳的拉力。
20.本发明的优点在于:
21.1、本发明绳驱动变刚度七自由度机械臂,各转动关节结构简单,通过十根绳索控制机械臂运动。
22.2、本发明针对多绳索驱动机械臂开发了耦合驱动组件,实现了仅通过四个电机对十根绳索的控制,进而驱动七自由度机械臂完成指定运动。
23.3、本发明绳驱动变刚度机械臂,通过独立绳驱动组件可以对肩关节、腕关节刚度
进行调节,进而实现机械臂刚度的调控。
附图说明
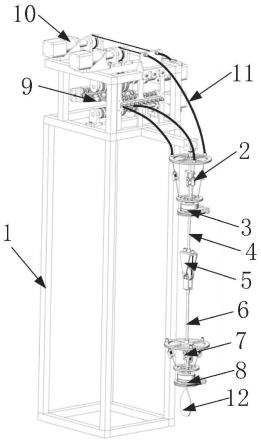
24.图1为本发明绳驱动变刚度七自由度机械臂整体结构示意图。
25.图2为本发明绳驱动变刚度七自由度机械臂中肩关节两自由度转动组件结构示意图。
26.图3为本发明绳驱动变刚度七自由度机械臂中肩关节单自由度转动组件结构示意图。
27.图4为本发明绳驱动变刚度七自由度机械臂中肘关节转动组件结构示意图。
28.图5为本发明绳驱动变刚度七自由度机械臂中耦合驱动组件结构示意图。
29.图6为本发明绳驱动变刚度七自由度机械臂中耦合驱动组件内绳索缠绕释方式示意图。
30.图7为本发明绳驱动变刚度七自由度机械臂中独立绳驱动组件结构示意图。
31.图中:
32.1-基座
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
2-肩关节两自由度转动组件 3-肩关节单自由度转动
33.ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
组件
34.4-大臂
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
5-肘关节转动组件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
6-小臂
35.7-腕关节两自由度转动组件 8-腕关节单自由度转动组件 9-耦合驱动组件
36.10-独立绳驱动组件
ꢀꢀꢀꢀꢀꢀꢀꢀ
11-博登线
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
12-手掌
37.201-上平台
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
202-上支座
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
203-十字轴
38.204-下支座
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
205-下平台
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
206-上段绳索
39.207-下段绳索
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
208-变刚度装置
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
301-转动基座
40.302-绕线盘
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
303a-肩部正向驱动绳
ꢀꢀꢀꢀꢀꢀ
303b-肩部反向驱动绳
41.501-连接架
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
502-肘部转轴
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
503-肘部绕线盘
42.504-小臂转接架
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
505a-肘部正向驱动绳
ꢀꢀꢀꢀꢀꢀ
505b-肘部反向驱动绳
43.901-上部电机
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
902-上电机安装座
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
903-上线轮组
44.904-上线轮组安装座
ꢀꢀꢀꢀꢀꢀꢀ
905-下部电机
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
906-下电机安装座
45.907-下线轮组
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
908-下线轮组安装座
ꢀꢀꢀꢀꢀꢀꢀ
909-导轮组
46.910-前导轮安装座
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
911-后导轮安装座
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
912-导杆基座
47.913-导杆
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
914-移动轮
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
915a-正向绳索
48.915b-反向绳索
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
916-驱动绳
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
1001-独立电机
49.1002-独立电机安装座
ꢀꢀꢀꢀꢀꢀ
1003-独立绳绕线盘
ꢀꢀꢀꢀꢀꢀꢀꢀ
1004-顶部支座
50.1005-独立绳
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
1006-导向座
具体实施方式
51.下面结合附图来对本发明做进一步说明。
52.本发明绳驱动变刚度七自由度机械臂,包括基座1、肩关节两自由度转动组件2、肩关节单自由度转动组件3、大臂4、肘关节转动组件5、小臂6、腕关节两自由度转动组件7、腕关节单自由度转动组件8、耦合驱动组件9、两套完全一样的独立绳驱动组件10、博登线11与
手掌12,如图1所示。
53.所述基座1具有下部矩形框架与上部矩形框架,实现整个机械臂的支撑。其中,下部矩形框架顶面前侧边处延伸设计有垂直于该侧边的支撑杆,支撑杆端部安装机械臂连接件;机械臂连接件顶部为矩形套环结构,配合套于支撑杆外端,通过轴向上的螺钉与支撑杆间固定;机械臂连接件下部为连接杆,连接杆底端具有连接面,用于连接固定由肩关节两自由度转动组件2、肩关节单自由度转动组件3、大臂4、肘关节转动组件5、小臂6、腕关节两自由度转动组件7、腕关节单自由度转动组件8构成的机械臂。上部框架内用于安装耦合驱动组件9。整个基座顶部安装绳驱动组件。
54.所述机械臂中,肩关节两自由度转动组件2位于机械臂的最上端,包含上平台201、上支座202、十字轴203、下支座204、下平台205以及由上段绳索206、下段绳索207与变刚度装置208构成的变刚度机构,如图2所示。其中,上平台201水平设置,上表面中心位置与前述连接杆底端连接面通过轴向上的螺钉固定相连。上平台202底面安装上支座连接件。上支座连接件上部为连接杆,竖直设置,顶端具有连接面,该连接面通过周向上的螺钉固定于上平台202下表面中心位置;上支座连接件与上支座202固连;上支座连接件下部为水平设置的杆状连接端,用来连接上支座202。
55.所述上支座202由两个t形结构上连接座构成,两个上连接座顶面与前述上支座连接件下部的杆状连接端固定。两个上连接座底端相对位置开有轴孔,分别与十字轴203中轴a两端同心配合,使十字轴可绕轴a转动。十字轴203的轴b两端连接下支座204。
56.所述下支座204由两个下连接做座构成,两个下连接座结构与前述上连接座相同,倒置。两个下连接座顶端相对位置开设轴孔分别与十字轴203的轴b两端同心配合,使下支座204可绕轴b转动;两个下连接座底面通过工字型连接件与下平台连接。其中两个下连接座底面与工字型连接件顶面固定,工字型连接件底面与下平台中部固定。
57.上述上平台201与下平台205均为具有中部十字梁的环形结构。上平台201与下平台205间周向上均布有三个变刚度机构。
58.所述变刚度机构包括外框架、碟形弹簧与拉杆。其中,外框架为矩形结构,相对两端分别开有同轴的大直径孔与小孔;大直径孔用来安装拉杆;小孔用来连接绳索。拉杆置于外框架内部,前端穿过大直径孔,且拉杆前端沿径向开孔用于连接绳索。碟形弹簧套于拉杆上,两端分别与外框架以及拉杆末端限位台肩配合定位;由此通过绳索控制,使拉杆沿大直径孔滑动,改变碟形弹簧的弹力,实现变刚度。上述结构的每个变刚度机构中,下段绳索207一端固连于下平台205上开设的绳孔中,另一端与变刚度装置208的外框架小孔连接;上段绳索206一端与变刚度装置208的拉杆前端开孔相连,另一端穿过上平台201上的绳孔,进入到与上平台201上的绳孔固定的博登线11内部走线连接耦合驱动组件9。由此,当拉拽或放松三个变刚度机构的上段绳索206,下平台205可相对上平台201产生绕十字轴203两个轴线的转动运动。
59.所述肩关节单自由度转动组件3位于肩关节两自由度转动组件2下方,包含转动基座301、绕线盘302、肩部正向驱动绳303a、肩部反向驱动绳303b,如图3所示。其中,转动基座301主体为圆盘形结构,底部向外延伸设计纵向走线面。其中,转动基座301主体顶面与肩关节两自由度转动组件2中的下平台205中心位置固定相连。绕线盘302同轴置于转动基座主体下方,且走线面位于绕线盘302侧方;绕线盘302通过中心转轴与转动基座301底面设计的
中心轴孔同心配合,使绕线盘302可绕中心轴孔的轴线转动。绕线盘302底面中心开孔,用于插接固定圆柱中空碳纤维杆结构的大臂4顶端。绕线盘302轴向上具有两道绕线槽,其中一道绕线槽内缠绕有肩部正向驱动绳303a,肩部正向驱动绳303a一端与绕线盘301固连,在绕线盘301上缠绕后沿水平方向穿过走线面上的绳孔,进入到与该绳孔固定的博登线11内部走线连接耦合驱动组件9;另一道绕线槽内缠绕有肩部反向驱动绳303b,肩部反向驱动绳303b一端与绕线盘302固连,其缠绕方向与正向驱动绳303a相反,在绕线盘301上缠绕后沿水平方向穿过走线面上的绳孔,进入到与该绳孔固定的博登线11内部走线连接耦合驱动组件9。由此,当拉拽肩部正向驱动绳303a、放松肩部反向驱动绳303b时,绕线盘302逆时针转动;当拉拽肩部反向驱动绳303b、放松肩部正向驱动绳303a时,绕线盘302顺时针转动。
60.所述肘关节转动组件5位于机械臂中间位置,包含连接架501、肘部转轴502、肘部绕线盘503、小臂转接架504、肘部正向驱动绳505a、肘部反向驱动绳505b,如图4所示。其中,连接架504为具有两侧倒三角形侧板与顶面的倒u形结构;连接架504顶面中心开孔与大臂4底端插接固定,中心开孔两侧对称位置还开有走线孔。连接架504两侧板底部夹角处对称开有轴孔,分别连接肘部转轴502两端。肘部绕线盘503中心轴孔与肘部转轴502同心配合安装。小臂转接架504为u形架,两侧上部与肘部绕线盘503两侧面间固定相连;小臂转接架504底面中心开有与连接架504顶面中心开孔同轴的开孔,与圆柱中空碳纤维杆结构的小臂6顶端插接固定。上述肘部绕线盘403上开有两道绕绳槽,分别用来缠绕肘部正向驱动绳505a与肘部反向驱动绳505b。其中,肘部正向驱动绳505a一端与绕线盘503固连,在肘部绕线盘503上缠绕后沿竖直方向穿过连接架501顶面上的一个走线孔,进入到与该走线孔固定的博登线11内部走线连接耦合驱动组件9。肘部反向驱动绳505b一端与肘部绕线盘503固连,其缠绕方向与肘部正向驱动绳505a相反,穿过连接架501上的另一个走线孔,进入到与该走线孔固定的博登线11内部走线连接耦合驱动组件9。当拉拽肘部正向驱动绳505a、放松肘部反向驱动绳505b时,绕线盘503及小臂转接架504逆时针转动;当拉拽肘部反向驱动绳505b、放松肘部正向驱动绳505a时,绕线盘503及小臂转接架504顺时针转动。
61.所述腕关节两自由度转动组件7与肩关节两自由度转动组件2结构相同,腕关节两自由度转动组件7中的上平台与下平台间高度可与肩关节两自由度转动组件2间不同,可根据实际情况进行调整。腕关节两自由度转动组件7中上平台中心开孔与小臂6底端间插接固定;下平台底面与腕关节单自由度转动组件8固连。
62.所述腕关节单自由度转动组件8与肩关节单自由度转动组件3完全一样,腕关节单自由度转动组件8中绕线盘底面中心孔处与手掌12末端设计的连杆插接固定;该手掌12可根据需求具体选择,如:allegro hand灵巧手。
63.所述耦合驱动组件9包含上部电机901、上电机安装座902、上线轮组903、上线轮组安装座904、下部电机905、下电机安装座906、下线轮组907、下线轮组安装座908、导轮组909、前导轮安装座910、后导轮安装座911、导杆基座912、导杆913、移动轮914、正向绳索915a、反向绳索915b、驱动绳916,如图5、图6所示。
64.其中,上电机安装座902与下电机安装座906固定安装于基座上部矩形框架顶面与下部矩形框架顶面(即上部矩形框架底面)中部沿左右方向设置的横梁上;上部电机901与下部电机的端面分别与上电机安装座902及下电机安装座902的安装面固连,使两个电机转轴平行于水平面设置,穿过各自安装座上圆孔。上线轮组903为上转轴上同轴固定套接的10
个具有不同直径的绕线圆盘;10个绕线圆盘与转轴可设计为一体结构通过3d打印整体成型。上转轴与上部电机901转轴通过联轴器同轴连接相连,且上转轴两端分别安装在基座1的上部矩形框架顶面中部左右方向的横梁上固定的上线轮组安装座904上。由此通过上部电机901可驱动转动与10个绕线圆盘一同旋转。
65.下线轮组907的结构及其与下部电机902的连接方式与上线轮组903相同,下线轮组907中下转轴两端分别安装在基座下部矩形框架顶面中部沿左右方向的横梁上固定的下线轮组安装座904上。区别在于下线轮组907中的10个绕线圆盘尺寸与上线轮组903中的10个绕线圆盘不同。所述上线轮组903与下线轮组907中各个绕线圆盘的具体尺寸及各尺寸绕线圆盘在轴向上的排布顺序,需根据所要求的机械臂所完成的动作进行反推确定。
66.所述导轮组909位于上线轮组903与下线轮组之间位置,包括前侧上下排列的两个前导轮组,以及后侧上下排列的两个后导轮组,且两个前导轮组与后端组前后位置对称。其中,两个前部导轮组与两个后导轮组结构尺寸相同,均为导轮轴上固定安装的10个等尺寸导轮;导轮与导轮轮轴可设计为一体结构,通过3d打印一体成型。两个前部导轮组的导轮轴两端分别安装于上部框架前侧左右两根纵梁间设计的横梁上固定的前导轮安装座910上;两个后部导轮组的导轮轴两端分别安装于上部框架后侧左右两根纵梁间设计的横梁上固定的后导轮安装座911上;且两个前导轮组与两个后导轮组中各个导轮分别与上线轮组903和下线轮组907中10个绕线圆盘轴向位置对应。
67.上述左右两个前导轮安装座910与后导轮安装座911上分别安装有一个条形板状导杆基座912,且位于上下两个导轮组之间,位置对称。同时前后两个导杆基座上沿左右方向等间隔开有位置相互对称的20个通孔;每组位置相对的通孔分别与一根导杆913两端插接固定,则前导轮安装座910与后导轮安装座911间沿左右方向共20根导杆913;且两根导杆913为一组,每组导杆913穿过轴线沿左右方向设置的移动轮914两侧的轴孔;则共有10个移动轮914,各移动轮周向位置与上线轮组和下线轮组中10个绕线圆盘轴向位置对应。
68.上述轴向位置对应的上线轮组的绕线圆盘、下线轮组的绕线圆盘、前导轮安装座910的导轮、后导轮安装组911的导轮以及移动轮914间,缠绕有导轮正向绳索915a或导轮反向绳索915b,如图6所示,图中实线为导轮正向绳索915a,虚线为导轮反向绳索915b。
69.其中,导轮正向绳索915a一端与上线轮组903中的绕线圆盘固连,缠绕于该绕线圆盘,随后向后导轮安装组911方向绕过后导轮安装组911中上方导轮后折返绕过移动轮中的绕线槽,再次折返绕过后导轮安装组911中下方导轮,最终缠绕于下线轮组907中的绕线圆盘,并与其固连。
70.导轮反向绳索915b一端与上线轮组903中的绕线圆盘固连,其缠绕方向与正向绳索915a相反,依次绕过绕线圆盘、导轮、移动轮914、导轮,再回到下线轮组907中的一个绕线圆盘,并与其固连。上述两种缠绕方式需根据所要求的机械臂所完成的动作进行反推确定需要选择通过导轮正向绳索915a或导轮反向绳索915b进行缠绕。
71.上述10个移动轮914分别与机械臂中的10根驱动绳连接,最左侧移动轮到最右侧移动轮914分别与肩关节两自由度转动组件2处两根绳索、肩关节单自由度转动组件3处两根驱动绳、肘关节转动组件5处两根驱动绳、腕关节两自由度转动组件7处两根绳索、腕关节单自由度转动组件8处两根驱动绳。各个驱动绳外部博登线11分别与前侧导杆基座912上沿左右方向设计的绳孔连接,各个驱动绳分别穿过各个绳孔后沿前后方向水平穿过移动轮
914轴向中心位置通孔后打结防止驱动绳脱出。
72.由此,当上部电机901、下部电机905转动时,带动上线轮组903、下线轮组907转动,进而使得各组导轮正向绳索915a、导轮反向绳索915b在相应上线轮组903和下线轮组907中的对应绕线圆盘上绕卷或放卷,进而驱动各个移动轮914沿导杆913移动,实现对各个接入移动轮914的驱动绳916和绳索的拉拽和放松,最终实现对各关节运动的控制。
73.所述独立绳驱动组件10位于基座1的上部矩形框架顶部,共有两套,分别安装于上部矩形框架顶面横梁上。两套独立绳驱动组件10结构及安装方式相同,均包含独立电机1001、独立电机安装座1002、独立绳绕线盘1003、顶部支座1004、独立绳1005、导向座1006,如图7所示。其中,独立电机安装座1002固定安装于横梁上;独立电机1001端面与独立电机安装座1002固连,独立电机1001转轴沿左右方向设置穿过独立电机安装座1002上圆孔。独立绳绕线盘1003与电机转轴通过联轴器相连,其两端分别安装在固定于横梁上的顶部支座1004上。
74.所述两套独立绳驱动组件10中的独立绳绕线盘上分别用来缠绕前述未与耦合驱动组件9相连的两根驱动绳,即所述独立绳1005,包括肩关节两自由度转动组件2处剩余的一根绳索以及腕关节两自由度转动组件7处剩余的一根绳索。两根绳索分别穿过上部矩形框架前侧边上固定安装的导向座1006上的绳孔,沿前后方向水平缠绕于两个独立绳绕线盘1003上,且两根驱动绳外部博登线11与绳孔连接固定,对驱动绳进行引导。由此,通过独立电机1001转动带动独立绳绕线盘1003运动,进而使得独立绳1005在其上缠绕,独立绳1005通过博登线11传递到各关节处;控制独立电机1001扭矩,可以调节独立绳1005上拉力,进而改变肩关节两自由度转动组件2和腕关节两自由度转动组件7中绳索的拉力,使其具有不同刚度性能,进而实现对机械臂整体刚度的调控。
75.本发明绳驱动变刚度七自由度机械臂,仅需4个电机即可实现对10根驱动绳索的控制,极大的降低了控制的复杂程度;该机械臂结构简单,可完成拟人化上肢典型动作,在抓取操作、服务迎宾等应用领域具有广阔的应用前景。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1