一种实验室用机器人系统
1.本发明涉及自动化设备领域,特别是涉及一种实验室用机器人系统。
背景技术:
2.在现代的生物检验实验室中,检验流水线早已在各大医院普及开来,因其速度快、高通量、自动化程度高广受医生和技师喜爱。但在实际临床检验工作当中,因流水线设备分属于不同的厂商且没有统一的规范,导致无法做到流水线的整合,从而无法建立起自动化的标本物流连接,并且,各科室也因各种原因所遗留的手工项目,无法有机地进行自动化整合,浪费了大量的生物资源。
3.综上所述,现有的生物检验实验室自动化设备,仅解决了自动化环节中的单个节点的问题,还未能完成整个实验室的自动化整合,因此,有必要提出一种实验室用机器人系统,通过对各种实验室内部的仪器设备和手工项目进行整合,来实现实验室全面自动化运行。
技术实现要素:
4.本发明的目的是提供一种实验室用机器人系统,以解决上述现有实验室自动化设备无法实现整个实验室自动化整合的问题。
5.为实现上述目的,本发明提供了如下方案:
6.本发明提供一种实验室用机器人系统,包括:
7.执行单元,所述执行单元包括轨道车和设置于所述轨道车上的执行组件;
8.地上固定轨道路线,所述地上固定轨道路线由若干轨道组件排列而成,所述地上固定轨道路线分布安装于实验室天花板和侧墙壁,相邻实验室的所述地上固定轨道路线能够相互贯通;所述轨道车与所述轨道组件行走配合,以使所述轨道车能够沿所述地上固定轨道路线在实验室地面以上空间以及实验室间穿梭行走;
9.地面巡线车,所述地面巡线车用于装载所述执行单元在实验室地面行走,所述地面巡线车能够通过对接部件与所述地上固定轨道路线上的所述轨道组件衔接,以实现所述执行单元在所述地面巡线车与所述地上固定轨道路线之间的位置切换;
10.控制系统,所述控制系统与所述执行单元、所述地面巡线车通讯连接。
11.可选的,所述地上固定轨道路线包括轨道交叉转换机构,所述轨道交叉转换机构包括:
12.位于同一平面内且延伸方向相互交汇的至少两段第一固定轨道,任意一段所述第一固定轨道均由至少一组所述轨道组件呈至少一列排布串联而成;
13.交叉转换机构,所述交叉转换机构包括旋转可动轨道单元、旋转可动轨道单元安装基座、平板旋转电机和第一平移机构,所述旋转可动轨道单元由至少一组所述轨道组件排列串联而成,所述旋转可动轨道单元设置于所述旋转可动轨道单元安装基座的一侧,所述旋转可动轨道单元安装基座与所述平板旋转电机相连,所述平板旋转电机用于驱动所述
旋转可动轨道单元安装基座转动,以使所述旋转可动轨道单元与不同的所述第一固定轨道平行;所述第一平移机构安装于所有所述第一固定轨道的交汇处,所述平板旋转电机与所述第一平移机构相连,所述第一平移机构用于驱动所述平板旋转电机移动,以使所述旋转可动轨道单元与不同的所述第一固定轨道对接,完成所述执行单元的交叉路线转换。
14.可选的,所述地上固定轨道路线还包括轨道平行转换机构,所述轨道平行转换机构包括:
15.位于同一平面内且平行错位布置的两段第二固定轨道,任意一段所述第二固定轨道均由至少一组所述轨道组件呈至少一列排布串联而成;
16.平行转换机构,所述平行转换机构包括可动轨道单元和第二平移机构,所述可动轨道单元由至少一组所述轨道组件呈至少一列排布串联而成,所述第二平移机构设置于两段所述第二固定轨道的交汇处,所述可动轨道单元与所述第二平移机构相连,并与所述第二固定轨道平行,所述第二平移机构用于驱动所述可动轨道单元移动,以使所述可动轨道单元与不同的所述第二固定轨道对接,完成所述执行单元的平行路线转换。
17.可选的,所述第一平移机构和所述第二平移机构均为丝杆滑块机构。
18.可选的,所述地上固定轨道路线还包括轨道立体转换机构,所述轨道立体转换机构包括:
19.两段第三固定轨道,两段所述第三固定轨道中的一者设置于实验室天花板,另一者设置于实验室侧墙壁,两段所述第三固定轨道呈垂直交叉状态,任意一所述第三固定轨道均由至少一组所述轨道组件呈至少一列排布串联而成;
20.立体转换机构,所述立体转换机构包括升降机构、升降支撑臂、轨道立体移动电机和可立体移动轨道,所述可立体移动轨道由至少一组所述轨道组件呈至少一列排布串联而成,所述升降机构设置于实验室侧墙壁上,并位于两段所述第三固定轨道的交汇处,所述升降支撑臂的一端与所述升降机构相连,另一端通过所述轨道立体移动电机与所述可立体移动轨道连接,所述轨道立体移动电机用于驱动所述可立体移动轨道翻转,以使所述可立体移动轨道与不同的所述第三固定轨道平行,所述升降机构用于驱动所述可立体移动轨道升降,以使所述可立体移动轨道与不同的所述第三固定轨道对接。
21.可选的,所述升降机构为升降机。
22.可选的,所述地上固定轨道路线包括实验室间穿行机构,所述实验室间穿行机构包括:
23.墙壁穿行窗口,所述墙壁穿行窗口开设于相邻实验室之间的间隔墙壁上;
24.第四固定轨道,所述第四固定轨道由至少一组所述轨道组件呈至少一列排布串联而成,所述第四固定轨道设置于所述墙壁穿行窗口的顶部,用于连通相邻两实验室的所述地上固定轨道路线;
25.电动侧开门,所述电动侧开门设置于所述墙壁穿行窗口处,并位于所述第四固定轨道的下方,所述电动侧开门用于控制所述墙壁穿行窗口的开闭。
26.可选的,所述对接部件为地面巡线车对接平台,所述地面巡线车对接平台包括第五固定轨道,所述第五固定轨道由至少一组所述轨道组件呈至少一列排布串联而成,所述第五固定轨道通过基座安装于实验室地板上,并与安装于实验室侧墙壁上的所述第三固定轨道呈垂直交叉状态,所述第五固定轨道与安装于实验室侧墙壁上的所述第三固定轨道之
间通过所述立体转换机构衔接。
27.可选的,任意一所述轨道组件均包括:
28.轨道体,所述轨道体呈“凵”字形结构,所述轨道体的双侧内壁设置有可供所述轨道车车轮滚动的凹槽;
29.齿条,所述齿条设置于所述轨道体的底面上,所述轨道车的车底设置有用于与所述齿条相啮合的齿轮和与所述齿轮相连的齿轮驱动装置;
30.黏贴凹框,所述黏贴凹框设置于所述轨道体的底面上,并位于所述齿条的两侧,所述黏贴凹框内设置有rfid射频位置识别标签;所述轨道车上设置有能够读取所述rfid射频位置识别标签的rfid射频位置识别标签读取传感器,以判断所述轨道车所处位置;
31.供电铜轨,所述供电铜轨通过供电铜轨绝缘支柱设置于所述轨道体的底面上,并位于所述齿条的一侧,所述供电铜轨用于给所述轨道车充电;
32.通讯铜轨,所述通讯铜轨通过通讯铜轨绝缘支柱设置于所述轨道体的底面上,并位于所述齿条的另一侧,所述通讯铜轨用于实现所述执行单元与所述控制系统的通讯连接。
33.可选的,实验室地面上设置有地面巡线车线路,所述地面巡线车线路包括:
34.巡线车线路,所述巡线车线路上间隔设置有rfid射频位置识别标签,所述地面巡线车上设置有能够识别所述rfid射频位置识别标签的rfid射频位置识别标签读取传感器,以判断所述地面巡线车所处位置;
35.地面巡线车充电待命停泊位,所述地面巡线车充电待命停泊位与所述巡线车线路连通,所述地面巡线车充电待命停泊位内设置有轨道车充电装置;
36.地面巡线车对接停泊位,所述地面巡线车对接停泊位与所述地面巡线车对接平台衔接。
37.可选的,所述地面巡线车包括:
38.巡线车车体,所述巡线车车体上设置有视觉避障和二维码识别摄像头、地面巡线车id识别二维码、超声波雷达避障探头和巡线传感器;
39.第六固定轨道,所述第六固定轨道设置于所述巡线车车体的顶部,所述第六固定轨道由至少一组所述轨道组件呈至少一列排布串联而成;所述第六固定轨道的两侧向外方向设置有对接定位销插座,所述第五固定轨道上设置有与所述对接定位销插座配合的对接定位销。
40.可选的,所述轨道车的轨道车车体上设置有轨道车id号牌、轨道车id识别二维码、超声波雷达避障探头和视觉避障和二维码识别摄像头;
41.所述执行组件包括安装于所述轨道车上的机械臂和设置于所述机械臂末端的执行器。
42.可选的,所述执行器为吸盘组件、柔抓组件、刚性四爪组件或移液组件。
43.本发明相对于现有技术取得了以下技术效果:
44.本发明提出的实验室用机器人系统,结构科学合理,使用安全方便,通过在实验室天花板和侧墙壁设置地上固定轨道路线供轨道车行驶,能够与地面巡线车协作,实现执行单元在实验室内多方位行走,能够达到实验室任何位置,无死角;同时相邻实验室的地上固定轨道路线能够相互贯通,可实现执行单元在不同实验室之间的穿梭行走,达到了对各种
实验室内部的仪器设备和手工项目进行整合的效果,不仅帮助实验室工作人员工作,分担压力,而且实现了实验室的全面自动化运行,提高了实验室的整体运行效率。同时由于很大程度上减少了人员的介入,能够有效避免因人为因素而造成的实验不良事件的发生,一定程度上保证了检测的质量。
附图说明
45.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
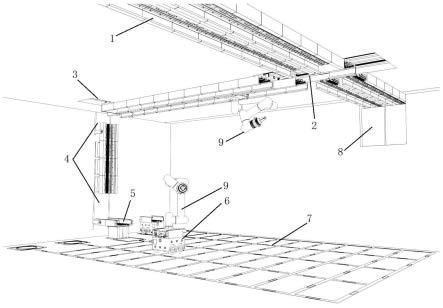
46.图1是本发明实施例所公开的实验室用机器人系统的整体结构示意图;
47.图2是本发明实施例所公开的轨道组件的结构示意图;
48.图3-1是本发明实施例所公开的轨道组件的爆炸图;
49.图3-2是本发明实施例所公开的轨道组件的主视图;
50.图3-3是本发明实施例所公开的轨道组件的俯视图;
51.图4是本发明实施例所公开的轨道交叉转换机构的结构示意图;
52.图5-1是本发明实施例所公开的轨道交叉转换结构的俯视图;
53.图5-2是本发明实施例所公开的轨道交叉转换结构的仰视图;
54.图6是本发明实施例所公开的轨道平行转换机构的结构示意图;
55.图7-1是本发明实施例所公开的轨道平行转换机构的俯视图;
56.图7-2是本发明实施例所公开的轨道平行转换机构的仰视图;
57.图8-1是本发明实施例所公开的轨道立体转换机构安装在天花板与侧墙壁之间时的安装示意图;
58.图8-2是本发明实施例所公开的轨道立体转换机构安装在侧墙壁与地面之间时的安装示意图;
59.图9-1是本发明实施例所公开的位于天花板与侧墙壁之间的轨道立体转换机构中,可立体移动轨道的立体转换过程示意图(图中箭头表示可立体移动轨道的位置转换步序,可立体移动轨道处于不同位置时,末端执行器的状态也作相应调整);
60.图9-2是本发明实施例所公开的位于侧墙壁与地面之间的轨道立体转换机构中,可立体移动轨道的立体转换过程示意图(图中箭头表示可立体移动轨道的位置转换步序,可立体移动轨道处于不同位置时,末端执行器的状态也作相应调整);
61.图10是本发明实施例所公开的地面巡线车对接平台结构示意图;
62.图11是本发明实施例所公开的地面巡线车对接平台与巡线车对接原理示意图;
63.图11-1是本发明实施例所公开的地面巡线车对接平台与巡线车对接完成状态示意图;
64.图12是本发明实施例所公开的地面巡线车的结构示意图;
65.图12-1是本发明实施例所公开的地面巡线车的爆炸图;
66.图13是本发明实施例所公开的地面巡线车线路机构的结构示意图;
67.图14是本发明实施例所公开的地面巡线车在线路上运行的示意图;
68.图15是本发明实施例所公开的实验室间穿行机构的结构示意图;
69.图15-1是本发明实施例所公开的执行单元穿越实验室间穿行机构时的结构示意图;
70.图15-2是本发明实施例所公开的执行单元穿过实验室间穿行机构后的结构示意图;
71.图16是本发明实施例所公开的执行单元中机械臂的结构示意图;
72.图17是本发明实施例所公开的执行单元中轨道车的结构示意图;
73.图17-1是本发明实施例所公开的执行单元中轨道车的仰视图;
74.图18是本发明实施例所公开的执行单元与轨道之间配合的示意图;
75.图19是本发明实施例所公开的执行单元、轨道组件以及地面巡线车之间配合的示意图。
76.其中,附图标记为:
77.1、轨道组件;11、齿条;12、rfid射频位置识别标签;13、供电铜轨;14、通讯铜轨;15、通信铜轨绝缘支柱;16、供电铜轨绝缘支柱;17、轨道组件安装螺丝;18、轨道体;
78.2、轨道交叉转换机构;21、旋转可动轨道单元;22、平板旋转电机;23、旋转可动轨道单元安装基座;24、旋转可动轨道单元滑轨座;25、旋转可动轨道单元丝杆电机;26、丝杆;27、滑杆;28、丝杆滑杆墙面固定座;29、固定轨道;
79.3、轨道平行转换机构;31、可动轨道单元丝杆电机;32、可动轨道单元丝杆滑杆稳定座;33、丝杆滑杆墙面固定座;34、丝杆;35、可动轨道单元安装基座;36、可动轨道单元;37、滑杆;38、固定轨道;
80.4、轨道立体转换机构;41、固定轨道;42、升降机;43、升降支撑臂;44、轨道立体移动电机;45、可立体移动轨道;
81.5、地面巡线车对接平台;51、轨道组件;52、对接定位销;53、基座;54、地面巡线车对接停泊位;
82.6、地面巡线车;60、巡线传感器;61、轨道组件;62、对接定位销插座;63、巡线车车体;64、视觉避障和二维码识别摄像头;65、地面巡线车id识别二维码;66、无线充电线圈;67、超声波雷达避障探头;68、运动电机与车轮;69、rfid射频位置识别标签读取传感器;
83.7、地面巡线车线路;71、无线充电线圈;72、地面巡线车充电待命停泊位;73、地面巡线车对接停泊位;74、巡线车线路;75、rfid射频位置识别标签;76、地板;
84.8、实验室间穿行机构;81、固定轨道;82、电动侧开门;83、间隔墙壁;84、墙壁穿行窗口;
85.9、执行单元;901、末端执行器;902、末端执行器适配接口;903、第六轴电机;904、第五轴电机;905、次级长臂;906、第四轴电机;907、第三轴电机;908、初级长臂;909、第二轴电机;910、第一轴电机;911、第一轴电机定子底座固定螺丝;912、第一轴电机定子底座;913、基座固定螺丝;914、机械臂基座;915、轨道车车体;916、轨道车负重轮;917、轨道车id识别二维码;918、轨道车id号牌;919、超声波雷达避障探头;920、视觉避障和二维码识别摄像头;921、rfid射频位置识别标签读取传感器;922、通讯铜轨接触簧片组;923、供电铜轨接触簧片组;924、动力电机传动齿轮。
具体实施方式
86.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
87.本发明的目的之一是提供一种实验室用机器人系统,以解决现有实验室自动化设备无法实现整个实验室自动化整合的问题。
88.为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
89.实施例一
90.本实施例提供一种实验室用机器人系统,包括轨道组件1、轨道交叉转换机构2、轨道平行转换机构3、轨道立体转换机构4、地面巡线车对接平台5、地面巡线车6、地面巡线车线路7、实验室间穿行机构8和执行单元9。其中,轨道组件1以轨道体18为主要框架,轨道体18呈“凵”字形结构,双侧内壁设置有可供轨道车负重轮916滚动的凹槽;在轨道体18底部中心,设置有齿条11的安装槽位,齿条11可通过轨道组件安装螺丝17将齿条11与轨道体18形成刚性连接;在轨道体18的齿条11的安装槽位两侧,分别设置有两个rfid射频位置识别标签12的黏贴凹框,即每个轨道组件1中均共设置四个rfid射频位置识别标签12的黏贴凹框,四枚rfid射频位置识别标签12黏贴与此;在轨道体18齿条11的一侧,比如右侧,设置有供电铜轨13,供电铜轨13通过供电铜轨绝缘支柱16与轨道体18形成绝缘刚性连接;在轨道体18齿条11的另一侧,如左侧,设置有通讯铜轨14,通讯铜轨14通过通讯铜轨绝缘支柱15与轨道体18形成绝缘刚性连接;轨道组件1由轨道组件安装螺丝17安装于墙壁或天花板上,除轨道交叉转换机构2、轨道平行转换机构3、轨道立体转换机构4的轨道组件1之外,其余轨道组件1均在墙壁或天花板上,呈固定状态,多个轨道组件1在墙壁或天花板上串联形成纵横交错的地上固定轨道路线。
91.本实施例中,如图5所示,轨道交叉转换机构2安装于墙壁或天花板凹槽中,轨道交叉转换机构2的外侧为由轨道组件1构成的固定轨道29(即前述的第一固定轨道),四条固定轨道29垂直交叉,形成交叉线路口,轨道交叉转换机构2的中心为两套可移动的转换机构,旋转可动轨道单元21上侧与平板旋转电机22连接,平板旋转电机22上侧与旋转可动轨道单元安装基座23连接,旋转可动轨道单元安装基座23上侧安装有两个旋转可动轨道单元滑轨座24与一台旋转可动轨道单元丝杆电机25,旋转可动轨道单元滑轨座24可在滑杆27上进行低阻力滑动,旋转可动轨道单元丝杆电机25可在丝杆26上进行可控移动,丝杆26和滑杆27通过丝杆滑杆墙面固定座28固定于墙壁或天花板上,其中,丝杆26与对应的丝杆滑杆墙面固定座28为转动连接关系,滑杆27与对应的丝杆滑杆墙面固定座28为不可转动连接关系。前述每条(段)固定轨道29均优选由两列轨道组件1组成。
92.本实施例中,如图7所示,轨道平行转换机构3安装于墙壁或天花板凹槽中,轨道平行转换机构3前后两侧为由轨道组件1构成的固定轨道38(即前述的第二固定轨道);轨道平行转换机构3的中心为一套可移动的转换机构,两个可动轨道单元36与可动轨道单元安装基座35连接在一起,可动轨道单元安装基座35上安装有8个可动轨道单元丝杆滑杆稳定座32,可与滑杆37和丝杆34进行低阻力支撑和滑行,可动轨道单元安装基座35上安装有一台
可动轨道单元丝杆电机31,可与丝杆34进行可控移动,丝杆34与滑杆37通过丝杆滑杆墙面固定座33固定于墙壁或天花板上,其中,丝杆34与对应的丝杆滑杆墙面固定座33为转动连接关系,滑杆37与对应的丝杆滑杆墙面固定座33为不可转动连接关系。前述每条(段)固定轨道38可由单列或两列轨道组件1组成。
93.本实施例中,如图8所示,轨道立体转换机构4安装于侧墙壁中,轨道立体转换机构4上下两侧为由轨道组件1构成的固定轨道41(即前述第三固定轨道),两段固定轨道41设置在屋顶或天花板与侧墙的垂直交界处;轨道立体转换机构4的中心为一套可移动的转换机构,一个可翻转的可立体移动轨道45通过轨道立体移动电机44与升降支撑臂43连接,并可通过轨道立体移动电机44实现可立体移动轨道45的翻转,升降支撑臂43与侧墙壁内的升降机42相连接,实现轨道立体转换机构4的上下移动。前述每条(段)固定轨道41可由单列或两列轨道组件1组成。
94.本实施例中,地面巡线车对接平台5通过基座53安装于地面,若地面铺设地板,则地面巡线车对接平台5通过基座53安装于地板上,基座53上侧安装由轨道组件1构成的轨道组件51(即前述第五固定轨道),轨道组件51的两侧向外方向,安装有四个对接定位销52,地面巡线车对接平台5的前侧地板上为地面巡线车对接停泊位54。
95.本实施例中,地面巡线车6顶部安装有由轨道组件1构成的轨道组件61(即前述第六固定轨道),轨道组件61的两侧向外方向,安装有四个与对接定位销52相配合的对接定位销插座62,轨道组件61下侧为巡线车车体63,巡线车车体63的前后两侧安装有视觉避障和二维码识别摄像头64,巡线车车体63的前后左侧黏贴有地面巡线车id识别二维码65,巡线车车体63的四面各安装三个超声波雷达避障探头67,巡线车车体63内部设有无线充电线圈66,巡线车车体63下侧安装有运动电机与车轮68、rfid射频位置识别标签读取传感器69、巡线传感器60。前述轨道组件61由单个轨道组件1组成。
96.本实施例中,地面巡线车线路7安装于地面,若地面铺设地板,则地面巡线车线路7安装于地板76上,主体是巡线车线路74,在巡线车线路74每一段的中心位置,安装有rfid射频位置识别标签75,地面巡线车线路7还包括地面巡线车对接停泊位73和地面巡线车充电待命停泊位72,其地面巡线车充电待命停泊位72的中心安装有无线充电线圈71,地面巡线车6移动至地面巡线车充电待命停泊位72处,可通过无线充电线圈66与无线充电线圈71配合,实现充电续航。
97.本实施例中,实验室间穿行机构8安装于相邻实验室的间隔墙壁83上,间隔墙壁83上开一窗口为墙壁穿行窗口84,窗口内设置有由轨道组件1构成的固定轨道81(即前述第四固定轨道),以和隔壁实验室内的轨道相连通,墙壁穿行窗口84的两侧安装有电动侧开门82,电动侧开门82打开,轨道车即可沿轨道进入隔壁实验室。前述固定轨道81可由单列或两列轨道组件1组成。
98.本实施例中,执行单元9主要由机械臂和轨道车两部分组成,机械臂优选为六轴机械臂,其主要由机械臂基座914、基座固定螺丝913、第一轴电机定子底座912、第一轴电机定子底座固定螺丝911、第一轴电机910、第二轴电机909、初级长臂908、第三轴电机907、第四轴电机906、次级长臂905、第五轴电机904、第六轴电机903、末端执行器适配接口902和末端执行器901组成。末端执行器901可为吸盘组件、柔抓组件、刚性四爪组件或移液组件,其通过末端执行器适配接口902与第六轴电机903连接,第六轴电机903与第五轴电机904连接,
第五轴电机904通过次级长臂905与第四轴电机906连接,第四轴电机906与第三轴电机907连接,第三轴电机907通过初级长臂908与第二轴电机909连接,第二轴电机909与第一轴电机910连接,第一轴电机定子底座912通过第一轴电机定子底座固定螺丝911与机械臂基座914连接,机械臂基座914通过基座固定螺丝913与轨道车车体915连接,轨道车车体915两侧各有6个轨道车负重轮916,轨道车车体915前后两侧中部黏贴有轨道车id号牌918,轨道车车体915前后两侧右部黏贴有轨道车id识别二维码917,轨道车车体915前后两侧左部安装有超声波雷达避障探头919和视觉避障和二维码识别摄像头920,轨道车车体915下侧中心安装有动力电机传动齿轮924,动力电机传动齿轮924左右两侧旁边安装有两台rfid射频位置识别标签读取传感器921,轨道车车体915下侧右外部装有供电铜轨接触簧片组923,轨道车车体915下侧左外部装有通讯铜轨接触簧片组922。
99.上述实验室用机器人系统,具体为一种实验室自动化用协作机器人系统,其工作原理如下:
100.(一)轨道与执行单元9连接运行原理:轨道组件1是旋转可动轨道单元21、可动轨道单元36、可立体移动轨道45、轨道组件51、轨道组件61等轨道线路的基本组成单元,旋转可动轨道单元21、可动轨道单元36、可立体移动轨道45、轨道组件51、轨道组件61等轨道结构均是至少一个轨道组件1无缝串联而成。工作时,执行单元9的轨道车车体915会一直位于轨道组件1上进行移动或停止,如图2、图17、图18所示,轨道车负重轮916可在轨道体18双侧的凹槽中滚动并承担压力,动力电机传动齿轮924与齿条11啮合,通过旋转动力电机传动齿轮924使轨道车车体915发生位移和停止,供电铜轨接触簧片组923是由两组3片带有弹性的铜制簧片组成,可与供电铜轨13产生弹性接触,实现供电,供电铜轨13上的两根铜轨可提供24v直流供电,实现执行单元9的用电需求,通讯铜轨接触簧片组922是由两组3片带有弹性的铜制簧片组成,可与通讯铜轨14产生弹性接触,实现通讯连接,通讯铜轨14上的两根铜轨可实现串口通讯,实现执行单元9与中央控制系统的通讯需求,rfid射频位置识别标签读取传感器921可在执行单元9通过轨道组件1上的rfid射频位置识别标签12时读取位置代码,判断执行单元9所处的位置。
101.(二)执行单元9中机械臂运行原理:执行单元9的上半部分为机械臂,是整套系统的核心部件,可以代替人力实现自动化的实验操作,其执行部件为末端执行器901,可以代替人类的手指,实现精细化操作,末端执行器901可进行更换,对不同的操作对象和用途进行设计和改造,末端执行器901可通过与末端执行器适配接口902与机械臂实现物理和电气连接,机械臂采用的是双长臂6轴的设计方式,可实现6个自由度的精细运动,其中第六轴电机903控制着末端执行器901的运动,第五轴电机904控制第六轴电机903的运动,第五轴电机904与次级长臂905连接,第四轴电机906可通过次级长臂905控制第五轴电机904的运动,第三轴电机907控制着第四轴电机906的运动,第三轴电机907与初级长臂908连接,第二轴电机909通过初级长臂908控制第三轴电机907的运动,第一轴电机910控制第二轴电机909的运动,第一轴电机910的定子安装于第一轴电机定子底座912上,通过电机与长臂的连接,实现机械臂的构成。
102.(三)执行单元障碍躲避原理:执行单元9的下半部分为轨道车部分,其轨道车车体915前后面的左侧有超声波雷达避障探头919和视觉避障和二维码识别摄像头920构成的执行单元9的避障系统,超声波雷达避障探头919可通过超声波测距原理,对运行轨道前后侵
入的异物或其他的执行单元进行监测,防止发生冲撞事故,视觉避障和二维码识别摄像头920可通过广角镜头对其前后同轨的其他执行单元进行识别,判断相对位置,也可以对轨道以外的物体进行视觉监测,防止冲撞事故的发生。
103.(四)地面巡线车障碍躲避原理:地面巡线车6的巡线车车体63前后侧安装有视觉避障和二维码识别摄像头64,其广角镜头可以监测运行线路中存在的障碍物,防止发生碰撞,也可以对其他运行中的地面巡线车进行识别,判断相对位置,巡线车车体63的四周各安装有3个超声波雷达避障探头67,可以通过超声波测距原理,对四周的障碍物距离进行判断,从而计算出最佳的运行路线。
104.(五)地面巡线车巡线与充电原理:地面巡线车6的巡线车车体63底部安装有巡线传感器60,可以识别地面巡线车线路7上的巡线车线路74,并沿巡线车线路74进行移动,巡线车车体63底部安装rfid射频位置识别标签读取传感器69,可以通过读取安装于地面巡线车线路7巡线车线路74中的rfid射频位置识别标签75上的位置信息,进行定位,判断所处位置,通过获取来自巡线传感器60和rfid射频位置识别标签读取传感器69的信号,对运动电机与车轮68进行驱动,使地面巡线车6进行移动,巡线车车体63底面内部还设有无线充电线圈66,当地面巡线车6移动到地面巡线车线路7中的地面巡线车充电待命停泊位72时,可通过无线充电线圈71对地面巡线车6进行无线充电。
105.(六)地面巡线车与地面巡线车对接平台对接原理:如图11所示,地面巡线车6的巡线车车体63底部安装的巡线传感器60和rfid射频位置识别标签读取传感器69通过对地面巡线车线路7进行识别,判断位置,并最终引导地面巡线车6进入地面巡线车对接停泊位73,在接近时,地面巡线车6前侧的超声波雷达避障探头67会对地面巡线车对接平台5的基座53进行超声波测距,并通过地面巡线车6前侧的视觉避障和二维码识别摄像头64判断是否对齐地面巡线车对接平台5,确认对齐后,地面巡线车6将会缓缓与地面巡线车对接平台5靠近,直到地面巡线车对接平台5上的对接定位销52插入地面巡线车6上的对接定位销插座62中,对接表示成功,地面巡线车6停止前进并锁定当前位置,此时,执行单元9便可以从地面巡线车对接平台5转移至地面巡线车6或从地面巡线车6转移至地面巡线车对接平台5中。
106.(七)执行单元从地面巡线车对接平台向地面巡线车进行转移的原理:当执行单元9移动至地面巡线车对接平台5,并且地面巡线车6也与地面巡线车对接平台5完成对接时,执行单元9便可以从地面巡线车对接平台5移动至地面巡线车6上的轨道组件61中,并完成锁定,此时地面巡线车6便完成与执行单元9的绑定,形成组合体,撤离地面巡线车对接平台5,进行独立的工作,反向转移是此逆过程。
107.(八)执行单元实验室间穿行原理:如图15所示,当执行单元9移动至实验室间穿行机构8附近时,执行单元9上的超声波雷达避障探头919会判断距离,并使动力电机传动齿轮924减速或停止,此时实验室间穿行机构8上的电动侧开门82会向两侧打开,暴露出墙壁穿行窗口84,执行单元9上的超声波雷达避障探头919判断前方无障碍物时,使动力电机传动齿轮924加速或运行,沿固定轨道81通过墙壁穿行窗口84,实现执行单元实验室间穿行,当执行单元9穿行过实验室间穿行机构8后,实验室间穿行机构8的电动侧开门82自动关闭。
108.(九)执行单元立体转换原理:如图8、图9-1和图9-2所示,当执行单元9需要从两根相互垂直的轨道上进行移动转换时,需要运用轨道立体转换机构4,首先,轨道立体转换机构4的可立体移动轨道45先与驶入端的固定轨道41平行对接,执行单元9通过驶入端的固定
轨道41进入到可立体移动轨道45中,并锁定,可立体移动轨道45会在升降支撑臂43的支撑下,由升降机42垂直移动,同时轨道立体移动电机44也会使可立体移动轨道45发生旋转,经过旋转90度后,继续由升降机42垂直移动到驶出端的固定轨道41,并与其平行对接,对接好后,执行单元9通过驶出端的固定轨道41驶出轨道立体转换机构4,完成立体转换,在轨道立体转换机构4旋转和垂直移动的过程中,执行单元9中的机械臂为避免发生碰撞,会进行相应的姿态调整。
109.(十)轨道平行转换机构原理:如图6、图7所示,当执行单元9需要从一条轨道转移到平行的另一条轨道时,需要使用到轨道平行转换机构3,执行单元9先从固定轨道38驶入可动轨道单元36,然后可动轨道单元36通过可动轨道单元安装基座35上的可动轨道单元丝杆电机31带动,沿丝杆34发生移动,当可动轨道单元36移动至另一平行轨道并与之对接时,执行单元9驶出可动轨道单元36,完成轨道平行转换。
110.(十一)轨道交叉转换机构原理:如图4、图5所示,当执行单元9需要经过相互交叉的多条轨道时,需要用到轨道交叉转换机构2,执行单元9首先经过驶入端的固定轨道29,驶入进旋转可动轨道单元21,然后旋转可动轨道单元21通过平板旋转电机22上的旋转可动轨道单元安装基座23上的旋转可动轨道单元丝杆电机25沿丝杆26移动,在移动的同时,平板旋转电机22也会带动旋转可动轨道单元21进行旋转,旋转移动至驶出端的固定轨道29时停止,执行单元9驶出旋转可动轨道单元21,完成交叉轨道的转换。
111.与现有技术相比,本技术方案提出的上述实验室自动化用协作机器人系统结构科学合理,使用安全方便,具体有益效果如下:
112.1、该系统可以提高实验室的自动化运行程度,极大程度地减少了人员的介入,有效避免了因人为因素而造成的实验不良事件的发生,一定程度上保证了检测的质量。通过高速的室内物流系统和智能的标本分级检测逻辑,可以显著缩短标本的周转时间和报告时间,特别是对于急诊和急查等标本项目的检测,为重症病人争取了宝贵的抢救时间,从而提高实验室的整体运行效率,尤其适用于生物检测实验室,可实现生物行业中生物检验实验室全面自动化运行。
113.2、采用了可根据使用目的更换的末端执行器,末端执行器是机械臂具体操作实验器材和设备的最前线,可以理解为人的手指手掌,根据不同的操作对象和应用,设计了不同的操作模式,为此,将末端执行器进行了模块化设计,末端执行器总接口采用统一设计,可以用于连接不同的末端执行组件,末端执行器是为了具体的实验和操作而具体设计的,有气动和电动两种,可根据功能和形态再分为吸盘组件、柔抓组件、刚性四爪组件、移液组件等。
114.3、采用了分级运行逻辑,将标本根据轻重缓急分为3种类型,分别是急诊急查级标本(急诊科、配血、急查传染病、急查生化、急查血常规、急查心肌酶等)、重要珍惜标本(脑脊液、骨髓、浓汁、组织块、肺泡灌洗液、胸腹水等)、普通日间标本(普通血样、痰液、尿液等)。根据分类,在出现运行冲突时,最高优先级执行急诊急查级的标本,确保报告的及时发放,优先执行重要珍惜标本,因为这一类标本难以获取,或再次取样可能会对患者造成更严重的伤害和更大的痛苦,最后进行普通的日间标本的检测。在遇到一血多测的情况时,如果是非急查项目,可根据占用标本时间和检测流程的顺序,进行依次上机检测,如果出现急查项目,则进行分管检测,例如血清标本在离心后,可分为多管,送至不同的流水线上同步进行
检测,缩短tat时间。
115.4、采用具有成熟技术和高灵活性的6轴机械臂,机械臂是主体能够进行多自由度运动的基础,目前以6轴机械臂为原型设计,也是目前现有的工业机器人中较为成熟的设计,可以使机械臂实现灵活地运动,满足日常工作生产和检测的需求。
116.5、采用地上固定轨道系统(安装于墙壁或天花板)和地面巡线系统双系统协作运行,避免了单纯的地面系统或天花板轨道系统由于存在运行死角,造成一些实验、检测无法顺利开展的问题,特别设计了可以实现天花板轨道系统和地面巡线系统的自由切换系统,可以实现双系统的协同工作,使整个实验室自动化用协作机器人系统的灵活性更强,实验室各设备的集成以及整合更加流畅。
117.本发明中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处。综上所述,本说明书内容不应理解为对本发明的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1