一种基于模糊自适应滑模算法的多机械臂力位控制方法
1.本发明涉及工业自动化控制技术领域,特别是涉及一种基于模糊自适应滑模算法的多机械臂力位控制方法。
背景技术:
2.近年来,随着我国工业的快速发展,机器人的应用得到了极大的提高,多机械臂系统在工业生产、成品装配等诸多领域正发挥着重要的作用,但其仍存在着许多问题,其一:多机械臂系统在实际工作过程中容易受到摩擦力等不确定因素影响,进而导致多机械臂系统的控制精度及稳定性出现较大的问题;其二:当多个机械臂末端执行器同时控制同一物体时会产生夹持内力,内力过小会导致机械臂无法稳固控制物体,内力过大则会对被控物体造成损伤。
3.因此,首先需要克服摩擦力等不确定因素对系统的影响,其次要保证机械臂稳固控制物体的同时不对物体造成损伤,而这正是我们需要解决的两大问题。针对上述问题,国内外专家们提出了诸多的控制方法。如滑模控制、自适应控制、神经网络控制等,kawasaki等提出了一种多机械臂系统分布式自适应协调控制方法,并引入了一种新的参考模型,sun等通过改进滑模控制策略,促进控制策略在有限时间内均匀收敛到零,hamamci等针对参数不确定提出了一种自适应控制器实现了网络的渐近同步,y.yang等通过设计了一种新的非奇异积分终端滑模控,从而解决了具有外在扰动及系统不确定性的双边遥控操作系统的固定时间同步控制问题。
4.然而,这些控制策略大多只解决了单一的问题,并且所设计控制方案均较为复杂。
技术实现要素:
5.针对上述技术问题,提供一种能够克服不确定因素的影响并进行内力控制及位置控制,最终可以提高系统响应速度及控制器控制精度的基于模糊自适应滑模算法的多机械臂力位控制方法;
6.一种基于模糊自适应滑模算法的多机械臂力位控制方法,所述方法包括:
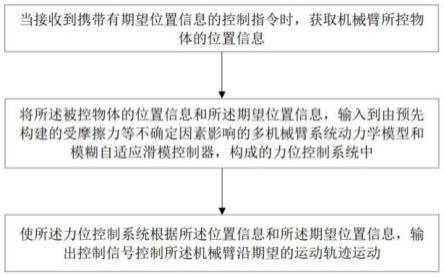
7.当接收到携带有期望位置信息的控制指令时,获取机械臂所控物体的位置信息;
8.将所述被控物体的位置信息和所述期望位置信息,输入到由预先构建的受摩擦力等不确定因素影响的多机械臂系统动力学模型和模糊自适应滑模控制器,构成的力位控制系统中,使所述力位控制系统根据所述位置信息和所述期望位置信息,输出控制信号控制所述机械臂沿期望的运动轨迹运动;
9.所述预先构建的受摩擦力等不确定因素影响的多机械臂系统动力学模型为:
[0010][0011]
其中,x=[x
1t
,x
2t
,...,x
nt
]
t
∈rn为当前被控物体位置信息,为x的一阶导数,为x的二阶导数,da(x)∈r
(n*n)
为惯性矩阵,为离心力与哥氏力矩阵,g(x)∈rn为重力项矢量,n为机械臂自由度,r
(n*n)
表示n*n维实数空间列矢量,jo、je均为雅可比转换矩阵,
为由摩擦力等不确定因素所组成的项,τa为控制输入力矩。
[0012]
所述预先构建的模糊自适应滑模控制器为:
[0013][0014]
其中,其中,xe为位置误差,xd为x的期望位置,xr为系统误差向量,λ>0,为xr的一阶导数,为xr的二阶导数,,为的估计,kd>0,w=diag(w1,...,wn),s为滑模函数,jo、je为雅可比矩阵,ki>0,e
fi
=f
i-f
id
,f
id
为期望内力,fi为内力。
[0015]
构建的受摩擦力等不确定因素影响的多机械臂系统动力学模型的方式,包括:
[0016]
建立由k个n自由度机械臂及被控物体所组成的多机械臂系统。则第i个机械臂动力学模型为:
[0017][0018]
其中:qi∈rn为机械臂角度向量,为qi的一阶导数,为qi的二阶导数,di(qi)∈r
(n*n)
为质量矩阵,为离心力与哥氏力矩阵,gi(qi)∈rn为重力矩阵,j
ei
(qi)∈r
(n*n)
为从qi到机械臂末端位置向量的雅可比矩阵,f
ei
∈rn为机械臂末端作用力,为由摩擦力等不确定因素所组成的项,τ为控制力矩。
[0019]
可得k个机械臂所组成的多机械臂动力学模型:
[0020][0021]
建立被控物体的动力学方程为:
[0022][0023]
其中,x=[x
1t
,x
2t
,...,x
nt
]
t
∈rn为被控物体的位置向量,do(x)∈r
(n*n)
为被控物体的惯性矩阵,为被控物体的离心力与哥氏力矩阵,go(x)∈rn为被控物体的重力项矢量,fo∈rn为被控物体所受外力。
[0024]
建立受摩擦力等不确定因素影响的多机械臂系统动力学模型:
[0025]
取x
li
∈rn为第i个机械臂末端位置向量,有x
l
=[x
l1t
,x
l2t
,...,x
lkt
]
t
∈r
kn
,设:其中,为从q到位置向量x
l
的变换矩阵。
[0026][0027]
其中:其中:
[0028]
上述方程经过转换后得受摩擦力等不确定因素影响的多机械臂系统动力学模型:
[0029][0030]
其中,τa=j
otje-t
τ。
[0031]
构建的模糊自适应滑模控制器的方式包括:
[0032]
设xd为期望的物体重心位置向量,定义以下变量:
[0033][0034]
其中,xe为位置误差,xd为x的期望位置,xr为系统误差向量,λ>0。
[0035]
滑模函数为:
[0036]
设计控制器为:
[0037][0038]
其中,为的估计,kd>0,w=diag(w1,...,wn)。
[0039]
对上述控制器进行变换,则最终的模糊自适应滑模控制器为:
[0040]
τ=j
et
(j
ot
)
+
τa+j
et
(f
id-k
iefi
)
[0041]
其中,其中,xe为位置误差,xd为x的期望位置,xr为系统误差向量,λ>0,为xr的一阶导数,为xr的二阶导数,,为的估计,kd>0,w=diag(w1,...,wn),s为滑模函数,jo、je为雅可比矩阵,ki>0,e
fi
=f
i-f
id
,f
id
为期望内力,fi为内力。
[0042]
上述基于模糊自适应滑模算法的多机械臂力位控制方法,通过当接收到携带有期望位置信息的控制指令时,获取被控物体当前位置信息;将位置信息和期望位置信息,输入到由预先构建的受摩擦力等不确定因素影响的多机械臂系统动力学模型和模糊自适应滑模控制器,构成的力位控制系统中,使力位控制系统根据位置信息和期望位置信息,输出控制信号控制机械臂沿期望的运动轨迹运动;该控制方法不仅提高了控制器的控制精度还提高了系统的响应速度。
附图说明
[0043]
图1是基于模糊自适应滑模算法的多机械臂力位控制方法步骤图;
[0044]
图2是基于模糊自适应滑模算法的多机械臂力位控制方法具体流程图;
[0045]
图3是双二自由度机械臂模型图;
具体实施方式
[0046]
如图1所示,提供了一种基于模糊自适应滑模算法的多机械臂力位控制方法,包括以下步骤:
[0047]
一种基于模糊自适应滑模算法的多机械臂力位控制方法,所述方法包括:
[0048]
当接收到携带有期望位置信息的控制指令时,获取机械臂所控物体的位置信息;
[0049]
将所述被控物体的位置信息和所述期望位置信息,输入到由预先构建的受摩擦力等不确定因素影响的多机械臂系统动力学模型和模糊自适应滑模控制器,构成的力位控制系统中,使所述力位控制系统根据所述位置信息和所述期望位置信息,输出控制信号控制所述机械臂沿期望的运动轨迹运动;
[0050]
所述预先构建的受摩擦力等不确定因素影响的多机械臂系统动力学模型为:
[0051]
[0052]
其中,x=[x
1t
,x
2t
,...,x
nt
]
t
∈rn为当前被控物体位置信息,为x的一阶导数,为x的二阶导数,da(x)∈r
(n*n)
为惯性矩阵,为离心力与哥氏力矩阵,g(x)∈rn为重力项矢量,n为机械臂自由度,r
(n*n)
表示n*n维实数空间列矢量,jo、je均为雅可比转换矩阵,为由摩擦力等不确定因素所组成的项,τa为控制输入力矩。
[0053]
所述预先构建的模糊自适应滑模控制器为:
[0054]
τ=j
et
(j
ot
)
+
τa+j
et
(f
id-k
iefi
)
[0055]
其中,其中,xe为位置误差,xd为x的期望位置,xr为系统误差向量,λ>0,为xr的一阶导数,为xr的二阶导数,,为的估计,kd>0,w=diag(w1,...,wn),s为滑模函数,jo、je为雅可比矩阵,ki>0,e
fi
=f
i-f
id
,f
id
为期望内力,fi为内力。
[0056]
构建的受摩擦力等不确定因素影响的多机械臂系统动力学模型的方式,包括:
[0057]
建立由k个n自由度机械臂及被控物体所组成的多机械臂系统。则第i个机械臂动力学模型为:
[0058][0059]
其中:qi∈rn为机械臂角度向量,为qi的一阶导数,为qi的二阶导数,di(qi)∈r
(n*n)
为质量矩阵,为离心力与哥氏力矩阵,gi(qi)∈rn为重力矩阵,j
ei
(qi)∈r
(n*n)
为从qi到机械臂末端位置向量的雅可比矩阵,f
ei
∈rn为机械臂末端作用力,为由摩擦力等不确定因素所组成的项,τ为控制力矩。
[0060]
可得k个机械臂所组成的多机械臂动力学模型:
[0061][0062]
建立被控物体的动力学方程为:
[0063][0064]
其中,x=[x
1t
,x
2t
,...,x
nt
]
t
∈rn为被控物体的位置向量,do(x)∈r
(n*n)
为被控物体的惯性矩阵,为被控物体的离心力与哥氏力矩阵,go(x)∈rn为被控物体的重力项矢量,fo∈rn为被控物体所受外力。
[0065]
建立受摩擦力等不确定因素影响的多机械臂系统动力学模型:
[0066]
取x
li
∈rn为第i个机械臂末端位置向量,有x
l
=[x
l1t
,x
l2t
,...,x
lkt
]
t
∈r
kn
,设:其中,为从q到位置向量x
l
的变换矩阵。
[0067][0068]
其中:其中:
[0069]
上述方程经过转换后得受摩擦力等不确定因素影响的多机械臂系统动力学模型:
[0070]
[0071]
其中,τa=j
otje-t
τ。
[0072]
构建的模糊自适应滑模控制器的方式包括:
[0073]
设xd为期望的物体重心位置向量,定义以下变量:
[0074][0075]
其中,xe为位置误差,xd为x的期望位置,xr为系统误差向量,λ>0。
[0076]
滑模函数为:
[0077]
设计控制器为:
[0078][0079]
其中,为的估计,kd>0,w=diag(w1,...,wn)。
[0080]
对上述控制器进行变换,则最终的模糊自适应滑模控制器为:
[0081]
τ=j
et
(j
ot
)
+
τa+j
et
(f
id-k
iefi
)
[0082]
其中,其中,xe为位置误差,xd为x的期望位置,xr为系统误差向量,λ>0,为xr的一阶导数,为xr的二阶导数,,为的估计,kd>0,w=diag(w1,...,wn),s为滑模函数,jo、je为雅可比矩阵,ki>0,e
fi
=f
i-f
id
,f
id
为期望内力,fi为内力。
[0083]
上述基于模糊自适应滑模算法的多机械臂力位控制方法,通过当接收到携带有期望位置信息的控制指令时,获取被控物体当前位置信息;将位置信息和期望位置信息,输入到由预先构建的受摩擦力等不确定因素影响的多机械臂系统动力学模型和模糊自适应滑模控制器,构成的力位控制系统中,使力位控制系统根据位置信息和期望位置信息,输出控制信号控制机械臂沿期望的运动轨迹运动;该控制方法不仅提高了控制器的控制精度还提高了系统的响应速度。
[0084]
整个发明的实施流程见图2。具体实施方法详见如下:
[0085]
1、建立多机械臂动力学模型
[0086]
第i个机械臂动力学模型为:
[0087][0088]
其中:qi∈rn为机械臂角度向量,为qi的一阶导数,为qi的二阶导数,di(qi)∈r
(n*n)
为质量矩阵,为离心力与哥氏力矩阵,gi(qi)∈rn为重力矩阵,j
ei
(qi)∈r
(n*n)
为从qi到机械臂末端位置向量的雅可比矩阵,f
ei
∈rn为机械臂末端作用力,为由摩擦力等不确定因素所组成的项,τ为控制力矩。
[0089]
则由k个机械臂所组成的多机械臂动力学模型为:
[0090][0091]
式中:
[0092]
q=[q
1t
,q
2t
,...,q
kt
]
t
∈r
kn
;d(q)=blockdiag[d1(q1),d2(q2),...,dk(qk)]∈r
kn*kn
;
[0093][0094]
g=[g
1t
,g
2t
,...,g
kt
]
t
∈r
kn
;je=blockdiag[j
e1
,j
e2
,...,j
ek
]∈r
kn*kn
;
[0095]
fe=[f
e1t
,f
e2t
,...,f
ekt
]
t
∈r
kn
;f(q,q,q)=[f
1t
,f
2t
,...,f
kt
]
t
∈r
kn
;
[0096]
τ=[τ
1t
,τ
2t
,...,τ
kt
]
t
∈r
kn
。
[0097]
由k个机械臂所组成的多机械臂动力学模型具有如下性质:
[0098]
性质1:存在正数k1,k2,满足下式:
[0099]
k1||s||2≤s
t
d(q)s≤k2||s||2[0100]
性质2:为斜对称矩阵,则:
[0101][0102]
2、建立被控物体动力学模型
[0103]
被控物体的动力学方程为:
[0104][0105]
其中,x=[x
1t
,x
2t
,...,x
nt
]
t
∈rn为被控物体的位置向量,do(x)∈r
(n*n)
为被控物体的质量矩阵,为被控物体的离心力与哥氏力矩阵,go(x)∈rn为被控物体的重力矩阵,fo∈rn为被控物体所受外力,且
[0106][0107]
其中,j
oi
(x)∈r
(n*n)
为从机械臂末端位置向量到x的雅可比矩阵,f
ei
∈rn为机械臂末端作用力。对于fe可分为内力fi∈r
k*n
和外力fo∈r
k*n
两部分。
[0108]
由于物体所受内力总和为零,即j
otfi
=0。
[0109]
可得:fe=(j
ot
)
+fo
+fi[0110]
其中,用(j
ot
)
+
∈r
(kn*n)
来表示j
ot
的伪逆矩阵。
[0111]
3、由多机械臂动力学模型及被控物体动力学模型整合得多机械臂系统动力学模型
[0112]
取x
li
∈rn为第i个机械臂末端位置向量,如图3,有x
l
=[x
l1t
,x
l2t
,...,x
lkt
]
t
∈r
kn
,设:
[0113]
其中,为从q到位置向量x
l
的变换矩阵。
[0114]
左右同时求关于时间的导数,得:
[0115][0116]
其中,
[0117]
又有:其中,jo(x)∈r
(n*n)
。
[0118]
可推导出:
[0119]
有:
[0120]
左右求关于时间的导数,得:
[0121][0122]
推导可得:
[0123][0124]
其中:其中:
[0125]
由于j
otfi
=0,令推导方程左右两边同左乘j
otje-t
,可得多机械臂系统动力学模型为:
[0126][0127]
其中,τa=j
otje-t
τ。
[0128]
3、设计基于模糊自适应滑模算法的力位控制器
[0129]
设xd为期望的物体重心位置向量,定义以下变量:
[0130][0131]
其中,xe为位置误差,xd为x的期望位置,xr为系统误差向量,λ>0。
[0132]
滑模函数为:
[0133]
设计控制器为:
[0134][0135]
其中:为的估计,kd>0,w=diag(w1,...,wn)。
[0136]
设计自适应律为:
[0137][0138]
其中:θi为理想参数,为参数估计误差,则γ=γ
t
>0。
[0139]
对变量xi(i=1,2,...n),定义mi个模糊集合a
ibi
(bi=1,2,...,mi),可用条模糊规则来构造模糊系统,则有
[0140][0141]
其中,为维向量,为隶属函数。
[0142]
模糊系统设计为:
[0143][0144]
设用于控制内力的项为:
[0145]fir
=f
id-k
iefi
[0146]
其中,ki>0,e
fi
=f
i-f
id
,f
id
为期望内力。
[0147]
由τa=j
otje-t
τ及j
otfi
=0可得:
[0148]
τa=j
otje-t
τ+j
otfir
[0149]
则最终的多机械臂系统力位控制器为:
[0150]
τ=j
et
(j
ot
)
+
τa+j
et
(f
id-k
iefi
)
[0151]
以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本发明的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1