沿双路径控制机器人系统就位的方法与流程
本公开涉及机器人控制领域,尤其涉及一种沿双路径控制机器人系统就位的方法及机器人系统。
背景技术:
1、随着技术的发展,由计算机控制机器人系统自主运动至作业区域以执行作业变的越来越普及。在一些作业中,需要机器人系统基于作业对象的位姿和所处环境规划运动路径,并沿运动路径驱动机器人系统运动至目标位姿,以实现对作业对象执行作业。
技术实现思路
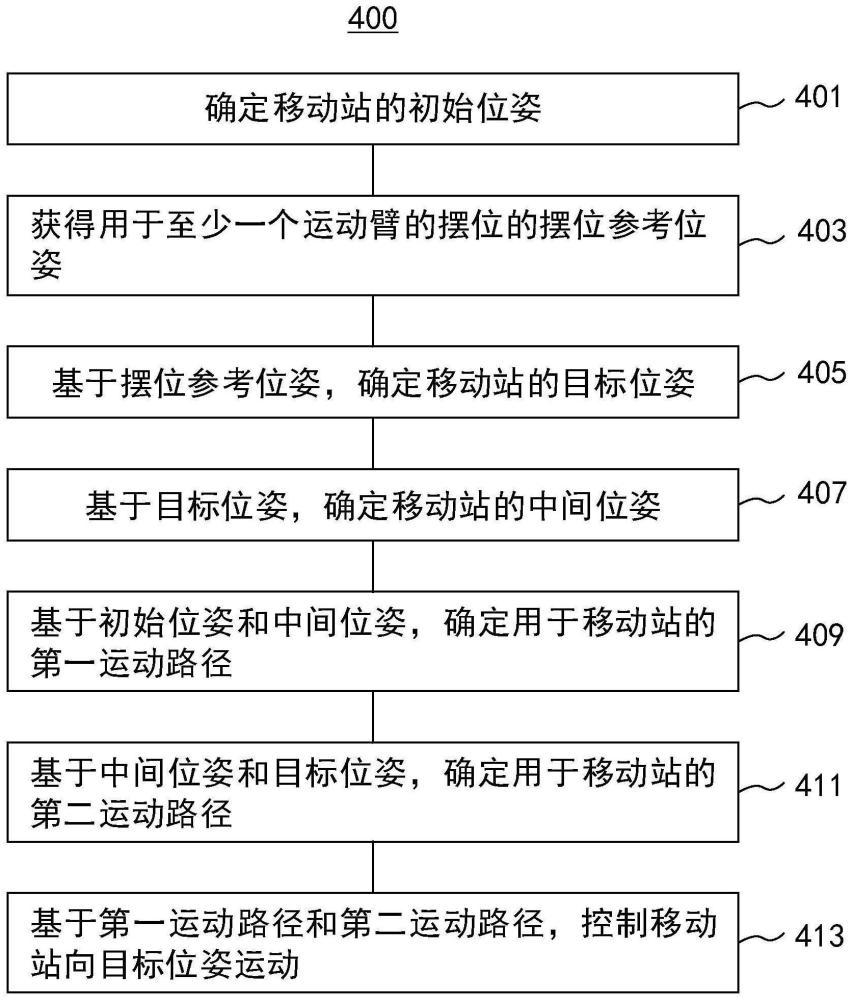
1、在一些实施例中,本公开提供了一种控制机器人系统就位的方法。机器人系统包括移动站,移动站包括至少一个运动臂。该方法包括:确定移动站的初始位姿;获得用于至少一个运动臂的摆位的摆位参考位姿;基于摆位参考位姿,确定移动站的目标位姿;基于目标位姿,确定移动站的中间位姿;基于初始位姿和中间位姿,确定用于移动站的第一运动路径;基于中间位姿和目标位姿,确定用于移动站的第二运动路径;以及基于第一运动路径和第二运动路径,控制移动站向目标位姿运动。
2、在一些实施例中,本公开提供了一种计算机设备,包括:存储器,用于存储至少一条指令;以及处理器,与存储器耦合,用于执行至少一条指令以执行本公开实施例中任一项的方法。
3、在一些实施例中,本公开提供了一种计算机可读存储介质,用于存储至少一条指令,至少一条指令由计算机执行时致使计算机执行本公开实施例中任一项的方法。
4、在一些实施例中,本公开提供了一种机器人系统,包括:移动站,移动站包括至少一个运动臂;以及控制装置,配置为执行本公开一些实施例中任一项的方法。
技术特征:
1.一种控制机器人系统就位的方法,其特征在于,所述机器人系统包括移动站,所述移动站包括至少一个运动臂,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,
3.根据权利要求1所述的方法,其特征在于,还包括:
4.根据权利要求3所述的方法,其特征在于,还包括:
5.根据权利要求3或4所述的方法,其特征在于,
6.根据权利要求5所述的方法,其特征在于,还包括:
7.根据权利要求1-4中任一项所述的方法,其特征在于,确定所述移动站的目标位姿包括:
8.根据权利要求7所述的方法,其特征在于,
9.根据权利要求8所述的方法,其特征在于,还包括:
10.根据权利要求7所述的方法,其特征在于,确定所述移动站的目标位姿包括:
11.根据权利要求7所述的方法,其特征在于,还包括:
12.根据权利要求7所述的方法,其特征在于,还包括:
13.根据权利要求8-12中任一项所述的方法,其特征在于,还包括:
14.根据权利要求1-4中任一项所述的方法,其特征在于,还包括:
15.一种计算机设备,包括:
16.一种计算机可读存储介质,用于存储至少一条指令,所述至少一条指令由计算机执行时致使所述计算机执行根据权利要求1-14中任一项所述的方法。
17.一种机器人系统,包括:
技术总结
本公开涉及机器人控制领域,公开一种沿双路径控制机器人系统就位的方法。机器人系统包括移动站,移动站包括至少一个运动臂。该方法包括:确定移动站的初始位姿;获得用于至少一个运动臂的摆位的摆位参考位姿;基于摆位参考位姿,确定移动站的目标位姿;基于目标位姿,确定移动站的中间位姿;基于初始位姿和中间位姿,确定用于移动站的第一运动路径;基于中间位姿和目标位姿,确定用于移动站的第二运动路径;以及基于第一运动路径和第二运动路径,控制移动站向目标位姿运动。
技术研发人员:徐凯,陈煜阳,张钰林,赵江然,姬利永,张宇
受保护的技术使用者:北京术锐机器人股份有限公司
技术研发日:
技术公布日:2024/3/11
- 还没有人留言评论。精彩留言会获得点赞!