定位机器人末端位置的方法、电子设备及存储介质与流程
本申请实施例涉及机器人,特别涉及一种定位机器人末端位置的方法、电子设备及存储介质。
背景技术:
1、随着机器人产业的快速发展,机器人轻量化成为发展的必由之路。轻量化机器人不仅更灵活,而且还可以节约能源,减少生产成本。与轻量化机器人密不可分的问题就是机器人的柔性,机器人的柔性可分为关节柔性和连杆柔性,但是针对关节柔性,一般仅考虑减速机传动造成的机器人关节的柔性变形,没有考虑到其他方向受力造成的柔性变形,例如机器人关节收到的弯矩对机器人关节的柔性变形造成的影响。而随着机器人自重的不断下降,减速机轻量化以及关节外壳材质采用铝合金或其他高强度的合金材料后,关节受到的弯矩对机器人关节造成的影响变得不可忽略。
2、因此,上述仅根据减速机传动造成的机器人关节的柔性变形进行定位机器人末端位置的补偿的方法,最终确定的机器人末端的位置精度较低,不利于机器人的作业。
技术实现思路
1、本申请实施例的目的在于提供一种定位机器人末端位置的方法、电子设备及存储介质,可以提升机器人末端位置的定位精度,从而确保机器人在各种工况下的正常作业。
2、为解决上述技术问题,本申请的实施例提供了一种定位机器人末端位置的方法,包括:
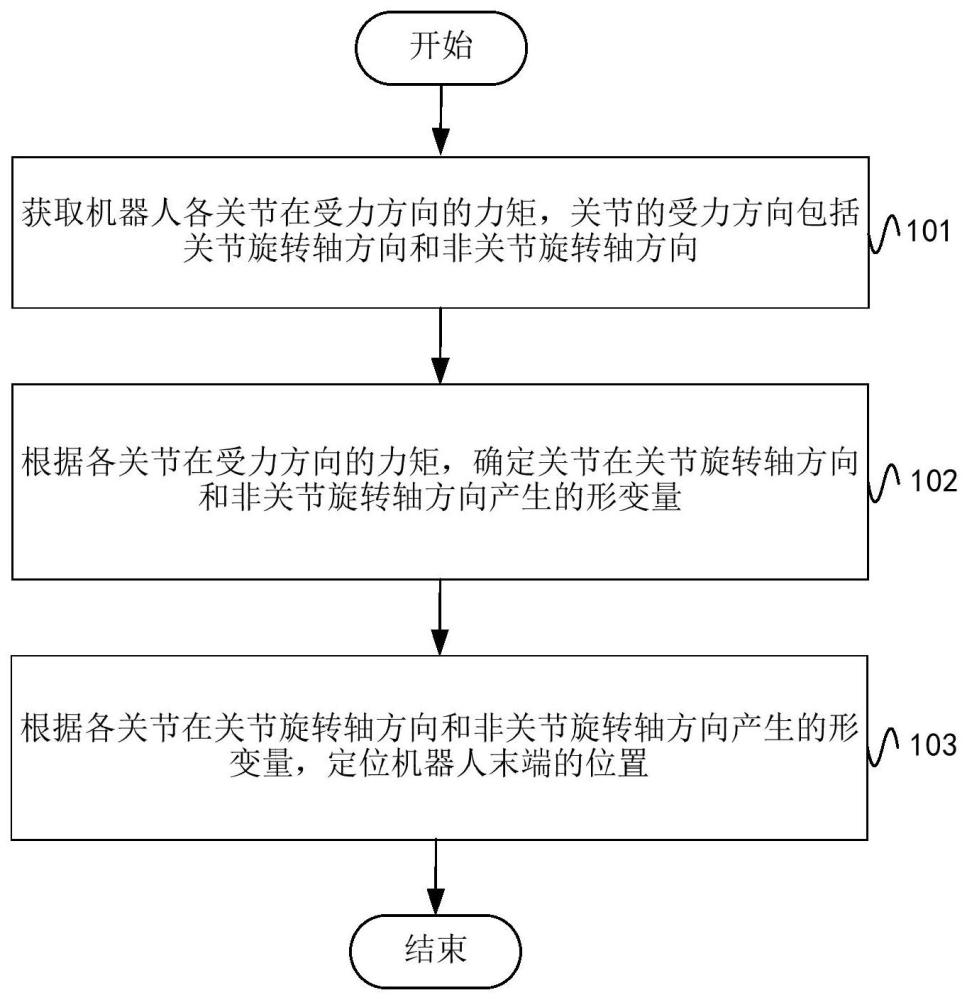
3、获取机器人各关节在受力方向的力矩,关节的受力方向包括关节旋转轴方向和非关节旋转轴方向;
4、根据各关节在受力方向的力矩,确定关节在关节旋转轴方向和非关节旋转轴方向产生的形变量;
5、根据各关节在关节旋转轴方向和非关节旋转轴方向产生的形变量,定位机器人末端的位置。
6、本申请的实施例还提供了一种电子设备,包括:至少一个处理器;以及,与所述至少一个处理器通信连接的存储器;其中,所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被所述至少一个处理器执行,以使所述至少一个处理器能够执行上述定位机器人末端位置的方法。
7、本申请的实施例还提供了一种计算机可读存储介质,存储有计算机程序,所述计算机程序被处理器执行时实现上述定位机器人末端位置的方法。
8、本申请实施例的定位机器人末端位置的方法,通过获取机器人的每个关节在每个受力方向的力矩,关节的受力方向包括关节旋转轴方向和非关节旋转轴方向,并根据关节在不同受力方向的力矩,对应计算关节在关节旋转轴方向和非关节旋转轴方向产生的形变量,最后根据所有关节在关节旋转轴方向和非关节旋转轴方向产生的形变量,定位机器人的末端位置。本申请中考虑到了机器人的关节在各个方向受力时造成的变形状况,因此在对定位机器人末端位置的补偿时较为全面,从而能够更加精确地定位到机器人末端位置,确保机器人在各种工况下的正常作业。
技术特征:
1.一种定位机器人末端位置的方法,其特征在于,包括:
2.根据权利要求1所述的定位机器人末端位置的方法,其特征在于,所述获取机器人各关节在受力方向的力矩,包括:
3.根据权利要求1或2所述的定位机器人末端位置的方法,其特征在于,确定各关节在非关节旋转轴方向产生的形变量,包括:
4.根据权利要求3所述的定位机器人末端位置的方法,其特征在于,根据所述机器人末端的负载的质心,获取各关节到所述机器人末端的连杆长度,包括:
5.根据权利要求3所述的定位机器人末端位置的方法,其特征在于,确定各关节在关节旋转轴方向产生的形变量,包括:
6.根据权利要求5所述的定位机器人末端位置的方法,其特征在于,所述根据各关节在关节旋转轴方向和非关节旋转轴方向产生的形变量,定位机器人末端的位置,包括:
7.根据权利要求6所述的定位机器人末端位置的方法,其特征在于,所述在机器人运动学方程中,确定各关节基于在关节旋转轴方向产生的形变量而引起的关节位置从其刚性坐标系变换到下一各关节的刚性坐标系的第一齐次变换矩阵,包括:
8.根据权利要求6所述的定位机器人末端位置的方法,其特征在于,所述在机器人运动学方程中,确定各关节基于在非关节旋转轴方向产生的形变量而引起的关节位置从其刚性坐标系变换到下一各关节的刚性坐标系的第二齐次变换矩阵,包括:
9.一种电子设备,其特征在于,包括:
10.一种计算机可读存储介质,存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现权利要求1至8中任一项所述的定位机器人末端位置的方法。
技术总结
本申请实施例涉及机器人技术领域,公开了一种定位机器人末端位置的方法、电子设备及存储介质。其中方法包括:获取机器人各关节在受力方向的力矩,关节的受力方向包括关节旋转轴方向和非关节旋转轴方向;根据各关节在受力方向的力矩,确定关节在关节旋转轴方向和非关节旋转轴方向产生的形变量;根据各关节在关节旋转轴方向和非关节旋转轴方向产生的形变量,定位机器人末端的位置。本方案可以提升机器人末端位置的定位精度,从而确保机器人在各种工况下的正常作业。
技术研发人员:林俐,邓洪洁,刘天华,孙锐,陈伟
受保护的技术使用者:上海新时达机器人有限公司
技术研发日:
技术公布日:2024/3/11
- 还没有人留言评论。精彩留言会获得点赞!