一种免编程机器人示教系统及方法与流程
本说明书实施例主要涉及机器人示教,具体为一种免编程机器人示教系统及方法。
背景技术:
1、工件在喷涂时需要用到机械臂(即机器人),机械臂在进行正常喷涂操作之前需要先进行示教。通过示教让机械臂提前知道工件的喷涂轨迹,进而在后续进行正常喷涂操作时,使得机械臂能够通过对应的喷涂轨迹自动对工件进行喷涂。
2、假设某一工件的喷涂轨迹为:先从基点a向右移动距离s1以到达点b(简称步骤1),然后从点b向下移动距离s2以到达点c(简称步骤2),接着从点c向前移动距离s3以到达点d(简称步骤3)。
3、现有技术的示教方式为:先对步骤1进行代码编辑以得到代码1、对步骤2进行代码编辑以得到代码2、对步骤3进行代码编辑以得到代码3,然后将代码1、代码2、代码3进行整合以得到最终的示教代码。
4、现有的示教方式需要点到点代码编辑喷涂轨迹,操作比较麻烦;且初步编辑得到的示教代码,其喷涂轨迹与实际喷涂操作所需的喷涂轨迹可能有差别,因此,还需要不停地调试示教代码,使其符合所需的喷涂轨迹,进而使得示教操作更为麻烦。
技术实现思路
1、本说明书实施例针对现有技术存在的问题,提出了一种免编程机器人示教系统及方法。
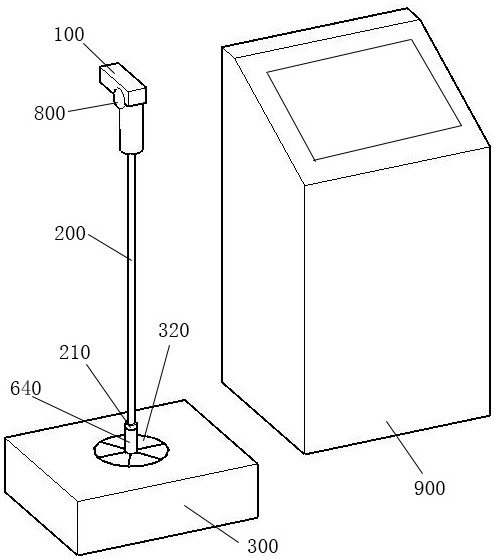
2、在第一方面,本说明书实施例提供了一种免编程机器人示教系统,包括:
3、控制柜;
4、旋转角度检测部件,与控制柜电性连接;
5、倾斜角度检测组件,与控制柜电性连接;
6、出绳长度检测部件,与控制柜电性连接;
7、手持部件,旋转角度检测部件与手持部件连接,旋转角度检测部件用于检测手持部件在水平方向上的旋转角度并将检测得到的旋转角度发送给控制柜;
8、盒体,其内部设有盒腔,且盒体的顶部开设有与盒腔连通的开口;倾斜角度检测组件和出绳长度检测部件设置在盒腔中;
9、绳体绕卷组件,设置在盒腔中;
10、绳体,其第一绳端与位于盒体外部的手持部件连接,且绳体的第二绳端依次穿过倾斜角度检测组件和出绳长度检测部件后与绳体绕卷组件绕卷连接;
11、当手持部件受到拉力时,部分绳体由盒腔内部被拉出至盒体外部;当手持部件失去拉力时,被拉出的绳体由盒体外部缩回盒腔内部;
12、倾斜角度检测组件用于检测绳体相对于竖直方向的倾斜角度并将检测得到的倾斜角度发送给控制柜;
13、出绳长度检测部件用于检测绳体被拉出至盒体外部的出绳长度并将检测得到的出绳长度发送给控制柜;
14、控制柜根据接收到的某一时间点的出绳长度、倾斜角度、旋转角度确定对应时间点的喷涂位置信息,并根据全部喷涂位置信息形成喷涂示教轨迹。
15、作为优选,倾斜角度检测组件包括:
16、支撑板,与盒腔的内壁连接,且支撑板开设有允许绳体穿过的通孔一;
17、第一倾斜角度检测部件,与支撑板的顶部连接,且第一倾斜角度检测部件开设有允许绳体穿过的通孔二,第一倾斜角度检测部件用于检测绳体在第一方向上相对于竖直方向的倾斜角度;
18、第二倾斜角度检测部件,与第一倾斜角度检测部件的顶部连接,且第二倾斜角度检测部件开设有允许绳体穿过的通孔三,第二倾斜角度检测部件用于检测绳体在第二方向上相对于竖直方向的倾斜角度;
19、转动定位套,与第二倾斜角度检测部件的顶部连接,转动定位套的套孔允许绳体穿过,且转动定位套贯穿开口。
20、作为优选,第一倾斜角度检测部件包括:
21、第一倾斜角度检测器,与控制柜电性连接,用于在第一方向上检测得到绳体相对于竖直方向的第一倾斜角度并将第一倾斜角度发送给控制柜,且第一倾斜角度检测器开设有通孔二;
22、第一转动支撑轴,与第一倾斜角度检测器的侧壁连接,且第一转动支撑轴的设置方向与第一方向垂直;
23、第一转动支撑架,与支撑板的顶部连接,且第一转动支撑架开设有允许第一转动支撑轴穿过并转动的第一转动支撑孔。
24、作为优选,第二倾斜角度检测部件包括:
25、第二倾斜角度检测器,与控制柜电性连接,用于在第二方向上检测得到绳体相对于竖直方向的第二倾斜角度并将第二倾斜角度发送给控制柜,且第二倾斜角度检测器开设有通孔三;
26、第二转动支撑轴,与第二倾斜角度检测器的侧壁连接,且第二转动支撑轴的设置方向与第二方向垂直;
27、第二转动支撑架,与第一倾斜角度检测器的顶部连接,且第二转动支撑架开设有允许第二转动支撑轴穿过并转动的第二转动支撑孔。
28、作为优选,绳体上设有定位块,当手持部件失去拉力时,被拉出的绳体由盒体外部缩回盒腔内部直至定位块与转动定位套的顶端抵接。
29、作为优选,出绳长度检测部件包括:
30、检测器本体,与支撑板的底部连接,且检测器本体开设有允许绳体穿过的通孔四和与通孔四连通的腔体;
31、导向套,安装在通孔四中,且导向套设有放大部;绳体设有出绳量刻度值;
32、图像采集器,嵌设置在检测器本体中,且图像采集器的图像采集头朝向字体放大部设置,用于采集具有出绳量刻度值的图片;
33、灯源,嵌设置在检测器本体中,灯源为腔体提供灯光;
34、图像处理器,与图像采集器及控制柜电性连接,图像处理器通过图片得到绳体的出绳长度并将出绳长度发送给控制柜。
35、作为优选,绳体绕卷组件包括:
36、绳盘壳,设置在出绳长度检测部件的下方;
37、绳盘,设置在绳盘壳中;
38、卷簧,绳体通过卷簧绕卷在绳盘上;
39、绳体绕卷组件与出绳长度检测部件之间的绳体还配设有导向轮。
40、作为优选,盒体在开口处设有弹性伸缩式开合门。
41、在第二方面,本说明书实施例提供了一种免编程机器人示教方法,采用第一方面的免编程机器人示教系统,包括以下步骤:
42、s2.工作人员通过手持部件对待喷涂的工件进行示教喷涂操作;
43、s4.在步骤s2进行过程中,获取手持部件的旋转角度和绳体的第一倾斜角度、第二倾斜角度、出绳长度,具体为:
44、旋转角度检测部件以一定的频率检测手持部件在水平方向上的旋转角度并将检测得到的旋转角度发送给控制柜;同时,第一倾斜角度检测器以相同的频率在第一方向上检测得到绳体相对于竖直方向的第一倾斜角度并将第一倾斜角度发送给控制柜;同时,第二倾斜角度检测器以相同的频率在第二方向上检测得到绳体相对于竖直方向的第二倾斜角度并将第二倾斜角度发送给控制柜;同时,出绳长度检测部件以相同的频率检测绳体被拉出至盒体外部的出绳长度并将出绳长度发送给控制柜;
45、s6.在步骤s4进行过程中,控制柜接收旋转角度、第一倾斜角度、第二倾斜角度和出绳长度,并根据接收到的某一时间点的旋转角度、第一倾斜角度、第二倾斜角度和出绳长度确定对应时间点的喷涂位置信息;
46、s8.在步骤s2结束后,控制柜通过全部喷涂位置信息形成喷涂示教轨迹。
47、作为优选,步骤s8具体包括:
48、s81.将基点对应的喷涂位置信息作为当前的喷涂位置信息,并进入步骤s82;
49、s82.若存在下一喷涂位置信息,则通过当前的喷涂位置信息和下一喷涂位置信息确定单步移动轨迹,并进入步骤s83;若不存在下一喷涂位置信息,则进入步骤s84;
50、s83.将下一喷涂位置信息作为当前的喷涂位置信息,并返回步骤s82;
51、s84.通过全部单步移动轨迹形成喷涂示教轨迹。
52、有益效果
53、本说明书实施例的免编程机器人示教系统及方法,只需要人工拿着手持部件对工件进行一遍示教喷涂操作即可,免编程机器人示教系统在人工示教喷涂过程中会自动通过旋转角度检测部件、倾斜角度检测组件、出绳长度检测部件采集手持部件的旋转角度和绳体的倾斜角度、出绳长度,并通过控制柜自动计算得到每组旋转角度、倾斜角度、出绳长度数据对应的喷涂位置信息,最后通过喷涂位置信息自动确定得到所需的喷涂示教轨迹,进而使得机器人的示教操作非常简便。
54、进一步地或者更细节的有益效果将在具体实施方式中结合具体实施例进行说明。
- 还没有人留言评论。精彩留言会获得点赞!