一种机器人结构的制作方法
本技术涉及机器人的,尤其是涉及一种机器人结构。
背景技术:
1、随着工业自动化的快速发展,机械臂式机器人在生产线、物流、服务等领域得到广泛应用。现有能够将输出端向相互垂直方向转动的机器人,具有两组分别驱动输出端单向转动的驱动部件,然而其两组驱动部件通常沿着机器人的长度方向排列,从而导致机器人整体尺寸偏大,这种大尺寸不仅增加了对工作空间的需求,也在一定程度上限制了机器人在有限空间环境中的实际应用。
技术实现思路
1、为了提高机器人对空间尺寸的适应度,本技术提供一种机器人结构。
2、本技术提供一种机器人结构,采用如下的技术方案:
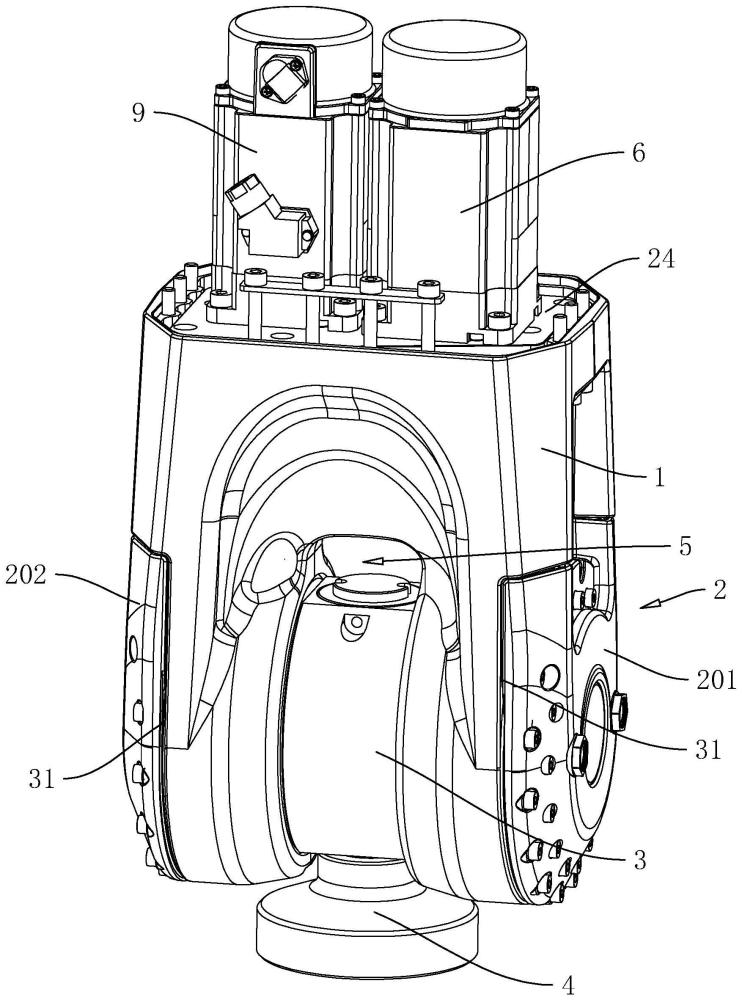
3、一种机器人结构,包括主壳、副壳组、转动壳以及输出臂,所述输出臂绕自身轴线转动于所述转动壳上并具有延伸至所述转动壳内的部分,所述转动壳绕自身轴线转动于所述主壳上,且所述输出臂轴线垂直于所述转动壳轴线;所述主壳一端中部形成有用于暴露所述输出臂的转动空间,所述主壳相互远离两侧均具有与所述主壳内腔连通的连通口,所述副壳组包括分别可拆卸连接于所述主壳两侧的第一副壳与第二副壳,所述转动壳相互远离两端均开口设置并分别与两个所述连通口相对;
4、机器人结构还包括用于驱动所述转动壳转动的第一驱动机构,以及用于驱动所述输出臂转动的第二驱动机构;所述第一驱动机构包括依次配合的第一动力、第一主动组件以及第一从动组件,所述第二驱动机构包括依次配合的第二动力、第二主动组件以及第二从动组件;
5、所述第一动力与所述第二动力安装于所述主壳远离所述转动壳的一端,所述第一主动组件与所述第二主动组件均安装于所述主壳中;所述第一从动组件安装于所述第一副壳与所述转动壳之间并与所述转动壳配合,以使所述第一动力通过所述第一主动组件使所述第一从动组件带动所述转动壳自转;所述第二从动组件安装于所述第二副壳与所述转动壳之间并进入所述转动壳与所述输出臂配合,以使所述第二动力通过所述第二主动组件使所述第二从动组件带动所述输出臂自转。
6、通过采用上述技术方案,将第一动力与第二动力并列设置,以缩短动力所需安装的行程长度,且将第一主动组件与第二主动组件均安装于主壳中,并将第一从动组件与第二从动组件分别安装于主壳相对两侧的副壳以及转动壳之间,以使得第一驱动机构与第二驱动机构能够带动输出臂沿转动壳轴线以及自身轴线转动,实现双向转动,且第一驱动机构与第二驱动机构的结构排布紧凑,以能够提高机器人对空间尺寸的适应度。
7、可选的,所述第一主动组件包括第一减速齿轮组、第一主动输出轴以及第一联动齿轮,所述第一减速齿轮组与所述第一动力啮合,以对所述第一动力输出的转速进行减速,所述第一主动输出轴转动于所述主壳上并用于同轴安装所述第一减速齿轮组中的末级齿轮,所述第一联动齿轮同轴设置于所述第一主动输出轴上并用于与所述第一从动组件配合;
8、所述第一从动组件包括转动于所述第一副壳上的第一从动齿轮,所述第一从动齿轮与所述转动壳同轴连接,且所述第一从动齿轮与所述第一联动齿轮相啮合,以使所述第一联动齿轮转动时带动所述第一从动齿轮转动。
9、通过采用上述技术方案,第一动力转速通过第一减速齿轮组减速后,通过第一主动输出轴输出,使与第一联动齿轮啮合的第一从动齿轮带动转动壳转动,以实现沿转动壳轴线方向上的转动。
10、可选的,述第一主动输出轴上配合有用于压持所述末级齿轮的防松件,所述防松件上开设有用于螺纹套设所述第一主动输出轴的连接孔,所述防松件上还设置有螺纹孔以及变形缝,所述变形缝连通所述连接孔与所述螺纹孔。
11、通过采用上述技术方案,防松件通过螺纹孔与变形缝的设置,将尺寸略大于螺纹孔的螺钉螺旋至螺纹孔中,能够使螺纹孔向靠近连接孔方向挤压第一主动输出轴,从而加强防松件与第一主动输出轴之间螺纹的紧固例,提高防松件的稳定性,从而使末级齿轮不易因防松件的松动而错位。
12、可选的,所述第一从动齿轮与所述第一副壳之间设置有配合轴承,所述配合轴承外圈与所述第一副壳可拆卸连接,所述第一从动齿轮可拆卸连接于所述配合轴承内圈与所述转动壳之间。
13、通过采用上述技术方案,通过配合轴承外圈于副壳连接以对配合轴承外圈限位,通过第一从动齿轮连接配合轴承内圈以及转动壳,使配合轴承能够辅助第一从动齿轮转动,且零部件之间能够拆卸,以便于对零部件进行检修更换。
14、可选的,所述第二主动组件包括第二减速齿轮组、第二主动输出轴以及第二联动齿轮,所述第二减速齿轮组与所述第二动力啮合,以对所述第二动力输出的转速进行减速,所述第二主动输出轴转动于所述主壳上并用于同轴安装所述第二减速齿轮组中的末级齿轮,所述第二联动齿轮同轴设置于所述第二主动输出轴上并用于与所述第二从动组件配合。
15、通过采用上述技术方案,第二动力通过第二减速齿轮组进行减速后,通过第二主动输出轴与第二联动齿轮将动力传输至第二从动组件中,以使第二从动组件带动输出臂转动。
16、可选的,所述第二从动组件包括
17、传动轴,同轴转动于所述转动壳中,靠近相对所述连通口的一端延伸至所述主壳中;
18、第二从动齿轮,同轴连接套设于所述传动轴位于所述主壳中的部分上并能够相对所述第二副壳转动,用于与所述第二主动组件配合;
19、第一斜齿轮,同轴设置于所述传动轴靠近所述输出臂的一端;以及
20、第二斜齿轮,同轴设置于所述输出臂上并与所述第一斜齿轮啮合。
21、通过采用上述技术方案,第二从动齿轮接收到第二主动组件的动力后,带动传动轴一同转动,使传动轴带动第一斜齿轮以及与第一斜齿轮啮合的第二斜齿轮转动,进而使与第二斜齿轮同轴的输出臂自转,以实现输出臂在自身轴线方向上的转动。
22、可选的,所述传动轴与所述转动壳之间配合有转动轴承,所述传动轴上螺纹移动有止退件,所述止退件抵接于所述第二从动齿轮背离所述转动轴承一端,所述第二从动齿轮与所述转动轴承内圈之间具有垫片,所述止退件与所述垫片一同对所述转动轴承进行预紧。
23、通过采用上述技术方案,止退件与垫片对转动轴承进行预紧,以增加转动轴承的刚度,提高转动轴承的旋转精度。
24、可选的,所述输出臂上螺纹移动有压紧件,所述压紧件作用于所述第二斜齿轮上以使所述第二斜齿轮保持与所述第一斜齿轮的啮合状态。
25、通过采用上述技术方案,压紧件作用至第二斜齿轮上并能够通过螺纹调节,以便于在第二斜齿轮受到磨损时调节压紧件位置,使第二斜齿轮与第一斜齿轮之间的啮合稳定。
26、可选的,所述转动壳于与所述转动空间相对处开设有检修口,所述转动壳于所述检修口处可拆卸连接有封盖,所述压紧件设置于所述输出臂靠近所述检修口的一端,且所述压紧件位于所述检修口中。
27、通过采用上述技术方案,封盖从转动壳上取下后即能够对检修口处的压紧件进行调节,以提高调节压紧件的便利程度。
28、可选的,所述输出臂于所述转动壳中螺纹连接有限位件,所述限位件用于支撑所述输出臂,以减弱所述第二斜齿轮齿面向靠近所述第一斜齿轮方向移动的趋势,且所述限位件与所述连通口相对。
29、通过采用上述技术方案,通过限位件支撑输出臂减少第二斜齿轮对第一斜齿轮的压紧力,以使得第二斜齿轮与第一斜齿轮之间过度摩擦而减少使用寿命。
30、综上所述,本技术包括以下至少一种有益效果:
31、1.通过将第一动力与第二动力共同排布于主壳一端,第一从动组件与第二从动组件分别排布于主壳两侧的副壳与转动壳之间,以分别带动转动壳和输出臂转动,使传动结构排布紧凑,减少机器人的整体长度,以提高机器人对空间尺寸的适应度,且通过连通口能够便于拆装和检修;
32、2.通过在转动壳上设置可拆卸的封盖,以便于在第二斜齿轮发生磨损时将封盖打开,通过检修口对压紧件进行螺纹移动以将第二斜齿轮压向第一斜齿轮,从而提高第一斜齿轮与第二斜齿轮啮合的稳定性。
- 还没有人留言评论。精彩留言会获得点赞!