一种机器人控制方法、装置、电子设备及存储介质与流程
本发明实施例涉及工业自动化领域,特别涉及一种机器人控制方法、装置、电子设备及存储介质。
背景技术:
1、柔性机器人主要由具有低杨氏模量的材料组成,与肌肉等柔性生物材料相媲美。它们可用于未来机器人辅助微创手术(r-mis)。在r-mis中,一些基本的可重复任务,如伤口缝合和抽血,可以自动完成,以减轻医务人员的工作量。对于机器人执行器,使用末端效应器跟踪指定轨迹构成了自动操纵的基本场景。刚性机器人在进行轨迹跟踪方面的研究已经得到了广泛的探索,而对于柔性机器人,特别是多段柔性机器人来说,仍然存在着挑战。构成机器人本体的柔性材料的弹性以及驱动方式,将给机器人建模带来复杂的变化。
2、发明人发现相关技术中至少存在如下问题:机器人的重复精度高,但绝对定位精度和轨迹精度较低,为了提高机器人的精度,传统方式标定机器人的杆长,减速比,零点等参数,部分控制器厂家提供了关节扭转角等参数补偿的方法,但该方法使得机器人运动学模型不再满足解析解的准则,只能采用数值解迭代求解,既增加了控制器的耗时,求解稳定性也得不到保证,从而导致绝对定位精度,轨迹精度较差。并且传统方式都只是在修正机器人的几何运动学模型,对更深入的动力学模型并未涉及。
技术实现思路
1、本发明实施方式的目的在于提供一种机器人控制方法,通过引入动力学柔性模型控制机器人运动,从而使得机器人的绝对定位精度,轨迹精度得以提升。
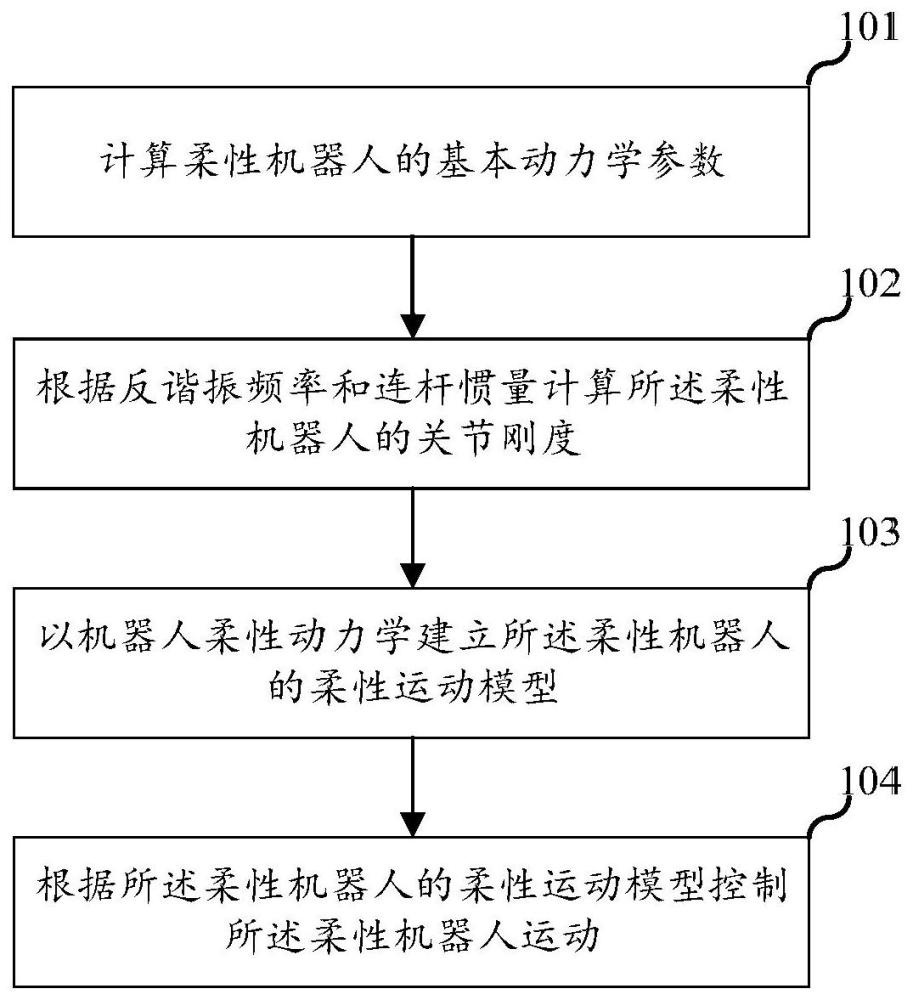
2、为解决上述技术问题,本发明的实施方式提供了一种机器人控制方法,包括:获取柔性机器人上的多个采样点的连杆转角和关节扭矩,根据所述连杆转角和关节扭矩以及机器人刚体动力学计算所述柔性机器人的基本动力学参数;获取所述柔性机器人的反谐振频率和连杆惯量,并根据所述反谐振频率和连杆惯量计算所述柔性机器人的关节刚度;根据所述多个采样点的连杆转角和所述柔性机器人的关节刚度和所述基本动力学参数,以机器人柔性动力学建立所述柔性机器人的柔性运动模型;根据所述柔性机器人的柔性运动模型控制所述柔性机器人运动。
3、本发明的实施方式还提供了一种机器人控制装置,包括:信息采集模块,用于获取柔性机器人上的多个采样点的连杆转角和关节扭矩,根据所述连杆转角和关节扭矩以及机器人刚体动力学计算所述柔性机器人的基本动力学参数;刚度计算模块,用于获取所述柔性机器人的反谐振频率和连杆惯量,并根据所述反谐振频率和连杆惯量计算所述柔性机器人的关节刚度;模型建立模块,用于根据所述多个采样点的连杆转角和所述柔性机器人的关节刚度,以机器人柔性动力学建立所述柔性机器人的柔性运动模型;运动控制模块,用于根据所述柔性机器人的柔性运动模型控制所述柔性机器人运动。
4、本发明的实施方式还提供了一种电子设备,包括:至少一个处理器;以及,与所述至少一个处理器通信连接的存储器;其中,所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被所述至少一个处理器执行,以使所述至少一个处理器能够执行上述的机器人控制方法。
5、本发明的实施方式还提供了一种计算机可读存储介质,存储有计算机程序,计算机程序被处理器执行时实现上述的机器人控制方法。
6、在本发明实施方式中,获取柔性机器人上的多个采样点的连杆转角和关节扭矩,根据所述连杆转角和关节扭矩以及机器人刚体动力学计算所述柔性机器人的基本动力学参数;获取所述柔性机器人的反谐振频率和连杆惯量,并根据所述反谐振频率和连杆惯量计算所述柔性机器人的关节刚度;根据所述多个采样点的连杆转角和所述柔性机器人的关节刚度和所述基本动力学参数,以机器人柔性动力学建立所述柔性机器人的柔性运动模型;根据所述柔性机器人的柔性运动模型控制所述柔性机器人运动。本发明从动力学模型出发,同时考虑关节柔性,即电机和连杆之间的柔性传动,将电机角和关节角分开考虑,提出一种机器人柔性建模、辨识和控制方法,该方法首先建立机器人的动力学柔性模型,然后通过激励轨迹辨识模型参数,最后通过轨迹规划所需的连杆角带入动力学柔性模型,控制机器人运动从而提高器人绝对定位精度,轨迹精度,并且对抑制末端抖动也有帮助。
7、另外,所述获取所述柔性机器人的反谐振频率和连杆惯量,并根据所述反谐振频率和连杆惯量计算所述柔性机器人的关节刚度,包括:向所述柔性机器人下发线性正弦激励信号并同时采集所述柔性机器人的轴反馈速度和力矩,对所述据进行柔性机器人的轴反馈速度和力矩进行傅里叶变换,并将所述线性正弦激励信号转换到频域以获取所述柔性机器人的反谐振频率;获取所述柔性机器人的连杆惯量,并根据所述反谐振频率和连杆惯量计算所述柔性机器人的关节刚度。根据反谐振频率和连杆惯量计算机器人关节刚度,可以单独获取减速机刚度,进一步提升模型建立的精确性。
8、另外,所述向所述柔性机器人下发线性正弦激励信号的过程中,所述线性正弦激励信号的幅值不会产生变化,频率随时间的增加而逐渐增大。提升激励轨迹辨识模型参数,进一步提升了关节刚度的获取精度,间接提升了模型的精准度。
9、另外,所述根据所述柔性机器人的柔性运动模型控制所述柔性机器人运动,包括:根据所述柔性机器人的柔性运动模型计算所述柔性机器人的所述电机转角并根据所述电机转角控制所述柔性机器人运动。通过轨迹规划所需的连杆角带入动力学柔性模型,反推出电机角下发给伺服,控制机器人运动从而提高机器人绝对定位精度。
10、另外,所述根据所述柔性机器人的柔性运动模型计算所述柔性机器人的所述电机转角,包括:将所述柔性运动模型中的所述视作常微分方程并采用隐式形式的梯形方法进行求解,以计算所述柔性机器人的所述电机转角。提升电机转角的计算精度,进一步抑制了电机的末端抖动。
11、另外,所述获取柔性机器人上的多个采样点的连杆转角和关节扭矩,根据所述连杆转角和关节扭矩以及机器人刚体动力学计算所述柔性机器人的基本动力学参数,包括:将刚体动力学方程线性化以得到回归方程;其中,m(θa)为惯性力矩阵,为科氏力矩阵,g(θa)为重力矩阵,θa为所述连杆转角,τa为所述关节扭矩;将激励轨迹以傅里叶级数的形式表示,并根据所述回归方程的条件数确定所述傅里叶级数的系数;根据多个采样点的连杆转角和关节扭矩和所述傅里叶级数的系数建立回归方程组;求解所述回归方程组以得到机器人的基本动力学参数。以机器人的动力学得到机器人的基本动力学参数,提升了模型的参数精度。
技术特征:
1.一种机器人控制方法,其特征在于,包括:
2.根据权利要求1所述的机器人控制方法,其特征在于,所述获取所述柔性机器人的反谐振频率和连杆惯量,并根据所述反谐振频率和连杆惯量计算所述柔性机器人的关节刚度,包括:
3.根据权利要求2所述的机器人控制方法,其特征在于,所述向所述柔性机器人下发线性正弦激励信号的过程中,所述线性正弦激励信号的幅值不会产生变化,频率随时间的增加而逐渐增大。
4.根据权利要求1所述的机器人控制方法,其特征在于,所述根据所述多个采样点的连杆转角和所述柔性机器人的关节刚度和所述基本动力学参数,以机器人柔性动力学建立所述柔性机器人的柔性运动模型,包括:
5.根据权利要求4所述的机器人控制方法,其特征在于,所述根据所述柔性机器人的柔性运动模型控制所述柔性机器人运动,包括:
6.根据权利要求5所述的机器人控制方法,其特征在于,所述根据所述柔性机器人的柔性运动模型计算所述柔性机器人的所述电机转角,包括:
7.根据权利要求1所述的机器人控制方法,其特征在于,所述获取柔性机器人上的多个采样点的连杆转角和关节扭矩,根据所述连杆转角和关节扭矩以及机器人刚体动力学计算所述柔性机器人的基本动力学参数,包括:
8.一种机器人控制装置,其特征在于,包括:
9.一种电子设备,其特征在于,包括:
10.一种计算机可读存储介质,存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现权利要求1至7中任一项所述的机器人控制方法。
技术总结
本发明实施例涉及工业自动化领域,公开了一种机器人控制方法、装置、电子设备及存储介质。本发明中,获取柔性机器人上的多个采样点的连杆转角和关节扭矩,计算所述柔性机器人的基本动力学参数;获取所述柔性机器人的反谐振频率和连杆惯量,计算所述柔性机器人的关节刚度,以机器人柔性动力学建立所述柔性机器人的柔性运动模型;根据所述柔性机器人的柔性运动模型控制所述柔性机器人运动。本发明从基本动力学出发,同时考虑关节柔性,将电机角和关节角分开考虑,通过激励轨迹辨识模型参数,最后通过轨迹规划所需的连杆角带入动力学柔性模型控制机器人运动从而提高笛卡尔空间绝对定位精度,轨迹精度,并且对抑制末端抖动也有帮助。
技术研发人员:刘天华,邓洪洁,林俐,孙锐,曾海,陈伟
受保护的技术使用者:上海新时达机器人有限公司
技术研发日:
技术公布日:2024/3/11
- 还没有人留言评论。精彩留言会获得点赞!