一种机器人快换接头装置及操作方法
1.本发明涉及机器人领域,尤其涉及一种机器人快换接头装置及操作方法。
背景技术:
2.机器人接头是机器人连接爪手的中间装置,机器人接头必须满足定位精度高、连接和释放快速的要求、使用时稳定性高不易变形的要求,需要一种装置解决以为问题。
技术实现要素:
3.本发明针对现有技术存在的上述不足,提供一种定位精度高、连接和释放快速、连接可靠的一种机器人快换接头装置及操作方法。
4.本发明的目的是通过以下技术方案来实现:一种机器人快换接头装置,包括释放装置、接头装置、卡紧装置,所述释放装置包括释放座、齿圈、齿轮,接头装置包括中间轴、接头座,卡紧装置包括卡紧座、卡块,所述释放座之间具有中间槽,中间槽外侧具有对称设置的四个凸轮,每个凸轮外侧各具有一个齿轮孔,释放座下部具有环槽,环槽一侧具有限位板,限位板一侧具有弹簧板,齿圈上部具有齿环,齿圈外侧具有把手,齿轮上部具有齿轮轴,齿轮轴上部具有拉板,拉板外侧具有拉板孔,齿环转动连接环槽,齿圈在环槽中转动,每个齿轮孔中各设置一个齿轮,每个齿轮轴从下部穿过齿轮孔,每个齿轮轴转动连接对应的齿轮孔,每个齿轮在对应齿轮孔中转动,每个齿轮和齿圈相互啮合,每个拉板孔内部放置一个螺栓,齿圈和释放座之间设置一号弹簧,一号弹簧两侧分别固定连接弹簧板和把手。
5.所述卡紧座中间具有卡紧座孔,卡紧座孔一侧具有贯穿卡紧座的卡紧座腰槽,卡紧座另外一侧下部具有斜面,卡紧座另外一侧上部具有立板,斜面外侧具有外板,外板中间具有外板腰槽,外板腰槽上部具有和外板腰槽垂直的横槽,横槽两侧各具有一个横槽螺孔,卡块内侧具有楔头,卡块外侧具有卡块方轴,卡块方轴外侧具有卡块竖销,卡块方轴滑动连接卡紧座孔,卡块竖销滑动连接卡紧座腰槽,卡块在卡紧座孔和卡紧座腰槽中滑动,卡块方轴外侧套入一个三号弹簧,三号弹簧两侧分别抵住楔头外侧和卡紧座孔端面。
6.有益效果:本发明定位精度高,连接和释放快速,连接可靠,使用的时候稳定性高不易变形,连接时四个楔头同时卡紧在四个楔形槽中,楔形的连接具有以下作用,第一,使得接头座和中间轴之间具有自动定心的作用,第二,使得中间轴和接头座连接更可靠,第三,防止中间轴和接头座之间产生转动和歪斜,保证了爪手和本发明的位置精度,正常工作时楔头和楔形槽的卡紧力,楔头和楔形槽的卡紧力由二号弹簧和三号弹簧共同提供,保证本发明连接可靠,脱离和连接时,只有三号弹簧提供夹紧力,使得中间轴和接头座能够顺利脱离和连接,齿轮通过螺栓和卡紧座连接,使得中间轴和接头座脱离时,接头座能够被固定,同时防止卡紧装置复位,中间轴和接头座连接时,齿轮复位,使得卡紧装置自动复位,中间轴和接头座自动被夹紧。
附图说明
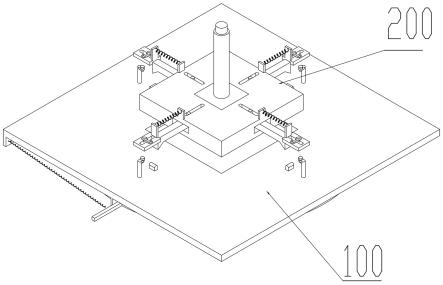
7.图1为本发明所述的机器人快换接头装置结构示意图。
8.图2为本发明所述的机器人快换接头装置正面结构示意图。
9.图3为本发明所述的机器人快换接头装置下部结构示意图。
10.图4为本发明所述的机器人快换接头装置释放时结构示意图。
11.图5为本发明所述的机器人快换接头装置释放时正面结构示意图。
12.图6为本发明所述的释放装置结构示意图。
13.图7为本发明所述的释放装置下部结构示意图。
14.图8为本发明所述的释放座结构示意图。
15.图9为本发明所述的释放座下部结构示意图。
16.图10为本发明所述的齿圈结构示意图。
17.图11为本发明所述的齿轮结构示意图。
18.图12为本发明所述的接头装置结构示意图。
19.图13为本发明所述的接头装置剖面结构示意图。
20.图14为本发明所述的接头装置释放时剖面结构示意图。
21.图15为本发明所述的卡紧装置结构示意图。
22.图16为本发明所述的中间轴结构示意图。
23.图17为本发明所述的接头座结构示意图。
24.图18为本发明所述的卡紧座结构示意图。
25.图19为本发明所述的卡紧座下部结构示意图。
26.图20为本发明所述的卡块结构示意图。
具体实施方式
27.下面根据附图和实施例对本发明作进一步详细说明:一种机器人快换接头装置,包括释放装置100、接头装置200、卡紧装置300,所述释放装置100包括释放座110、齿圈120、齿轮130,接头装置200包括中间轴210、接头座220,卡紧装置300包括卡紧座310、卡块320,所述释放座110之间具有中间槽111,中间槽111外侧具有对称设置的四个凸轮112,每个凸轮112外侧各具有一个齿轮孔113,释放座110下部具有环槽114,环槽114一侧具有限位板115,限位板115一侧具有弹簧板116,齿圈120上部具有齿环121,齿圈120外侧具有把手122,齿轮130上部具有齿轮轴131,齿轮轴131上部具有拉板132,拉板132外侧具有拉板孔133,齿环121转动连接环槽114,齿圈120在环槽114中转动,每个齿轮孔113中各设置一个齿轮130,每个齿轮轴131从下部穿过齿轮孔113,每个齿轮轴131转动连接对应的齿轮孔113,每个齿轮130在对应齿轮孔113中转动,每个齿轮130和齿圈120相互啮合,每个拉板孔133内部放置一个螺栓150,齿圈120和释放座110之间设置一号弹簧140,一号弹簧140两侧分别固定连接弹簧板116和把手122。使用本发明时,将中间轴和机器人连接,机器人爪手和接头座下部固定连接,中间轴卡在四个卡紧装置中间,释放装置放置在固定的位置,本发明使用分别释放模式和连接模式,第一,释放模式,机器任人携带接头装置和卡紧装置移动到本发明到释放装置上部,然后从释放装置上部开始往下移动,机器人爪手会从中间槽中间穿过,当本发明往下移动一定距离后,四个斜面下部会和四个凸轮
接触,四个斜面在四个凸轮作用下往本发明外部移动,四个卡紧座带动各自卡块往外部移动,四个卡块松开对卡紧座的夹紧,四个卡块在三号弹簧作用下仍然卡在四个楔形槽中,本发明往下移动时,四个拉板会穿过四个外板腰槽,当接头座下部和释放座上部接触时,机器人停止移动,此时用手拉动把手,齿圈转动,齿圈转动带动四个齿轮同时转动,拉板转动到横槽重合的方位,转动螺栓,螺栓下部拧进横槽螺孔中,此时机器人带动中间轴往上移动,接头装置往上移动时,接头座被固定,由于卡块只受到三号弹簧的弹力,弹簧力比较小,楔形槽会将四个卡块往外侧推动,中间轴从四个卡块中脱离,接头座和卡紧装置被固定螺栓在当前位置不动,第二,连接模式,本发明被释放后,机器人带动中间轴移动到需要连接的爪手上部,机器人带动中间轴往下移动,此时楔形槽下部会插入卡块槽中,随后中间轴下部将四个卡块往外侧推动,中间轴继续往下移动,卡块会卡入对应楔形槽中,机器人停止往下移动,此时拧开螺栓,齿圈在一号弹簧作用下复位,复位时,把手侧面和限位板侧面接触,机器人反向移动,机器人带动本发明往上移动,当接头装置脱离和释放座的接触后,四个卡紧装置在四个二号弹簧作用下复位,卡块在三号弹簧和二号弹簧共同作用下卡紧在楔形槽内部,本发明和机器人牢牢接触,使用的时候稳定性高,不易变形。
28.所述卡紧座310中间具有卡紧座孔311,卡紧座孔311一侧具有贯穿卡紧座310的卡紧座腰槽312,卡紧座310另外一侧下部具有斜面313,卡紧座310另外一侧上部具有立板314,斜面313外侧具有外板315,外板315中间具有外板腰槽316,外板腰槽316上部具有和外板腰槽316垂直的横槽317,横槽317两侧各具有一个横槽螺孔318,卡块320内侧具有楔头321,卡块320外侧具有卡块方轴322,卡块方轴322外侧具有卡块竖销323,卡块方轴322滑动连接卡紧座孔311,卡块竖销323滑动连接卡紧座腰槽312,卡块320在卡紧座孔311和卡紧座腰槽312中滑动,卡块方轴322外侧套入一个三号弹簧330,三号弹簧330两侧分别抵住楔头321外侧和卡紧座孔311端面。
29.所述中间轴210下部具有方块211,方块211四个侧面各具有一个楔形槽212,接头座220中间具有卡块槽221,卡块槽221四个侧面各具有一个贯穿接头座220的卡块孔222,每个卡块孔222中间具有贯穿卡块孔222的接头座腰槽223,每个接头座腰槽223外侧具有接头座弹簧板224,方块211滑动连接卡块槽221,中间轴210在卡块槽221中滑动,每个卡块孔222中间各设置一个卡紧装置300,每个卡块320滑动连接对应的卡块孔222,每个卡块320在卡块孔222中滑动,卡块竖销323在同侧的接头座腰槽223中滑动,每个卡紧装置300和接头座220之间各设置一个二号弹簧230,每个二号弹簧230两侧分别固定连接接头座弹簧板224和立板314,四个楔头321卡在同侧的楔形槽212中。
30.使用本发明时,将中间轴210和机器人连接,机器人爪手和接头座220下部固定连接,中间轴210卡在四个卡紧装置300中间,释放装置100放置在固定的位置,本发明使用分别释放模式和连接模式,第一,释放模式,机器任人携带接头装置200和卡紧装置300移动到本发明到释放装置100上部,然后从释放装置100上部开始往下移动,机器人爪手会从中间槽111中间穿过,当本发明往下移动一定距离后,四个斜面313下部会和四个凸轮112接触,四个斜面313在四个凸轮112作用下往本发明外部移动,四个卡紧座310带动各自卡块320往外部移动,四个卡块320松开对卡紧座310的夹紧,四个卡块320在三号弹簧330作用下仍然卡在四个楔形槽212中,本发明往下移动时,四个拉板132会穿过四个外板腰槽316,当接头座220下部和释放座110上部接触时,机器人停止移动,此时用手拉动把手122,齿圈120转
动,齿圈120转动带动四个齿轮130同时转动,拉板132转动到横槽317重合的方位,转动螺栓150,螺栓150下部拧进横槽螺孔318中,此时机器人带动中间轴210往上移动,接头装置200往上移动时,接头座220被固定,由于卡块320只受到三号弹簧330的弹力,弹簧力比较小,楔形槽212会将四个卡块320往外侧推动,中间轴210从四个卡块320中脱离,接头座220和卡紧装置300被固定螺栓150在当前位置不动,第二,连接模式,本发明被释放后,机器人带动中间轴210移动到需要连接的爪手上部,机器人带动中间轴210往下移动,此时楔形槽212下部会插入卡块槽221中,随后中间轴210下部将四个卡块320往外侧推动,中间轴210继续往下移动,卡块320会卡入对应楔形槽212中,机器人停止往下移动,此时拧开螺栓150,齿圈120在一号弹簧140作用下复位,复位时,把手122侧面和限位板115侧面接触,机器人反向移动,机器人带动本发明往上移动,当接头装置200脱离和释放座110的接触后,四个卡紧装置300在四个二号弹簧230作用下复位,卡块320在三号弹簧330和二号弹簧230共同作用下卡紧在楔形槽212内部,本发明和机器人牢牢接触。
31.本发明定位精度高,受力均衡,连接和释放快速,连接可靠,连接时四个楔头321同时卡紧在四个楔形槽212中,楔形的连接具有以下作用,第一,使得接头座220和中间轴210之间具有自动定心的作用,第二,使得中间轴210和接头座220连接更可靠,第三,防止中间轴210和接头座220之间产生转动和歪斜,保证了爪手和本发明的位置精度,正常工作时楔头321和楔形槽212的卡紧力,楔头321和楔形槽212的卡紧力由二号弹簧230和三号弹簧330共同提供,保证本发明连接可靠,脱离和连接时,只有三号弹簧330提供夹紧力,使得中间轴210和接头座220能够顺利脱离和连接,齿轮130通过螺栓150和卡紧座310连接,使得中间轴210和接头座220脱离时,接头座220能够被固定,同时防止卡紧装置300复位,中间轴210和接头座220连接时,齿轮130复位,使得卡紧装置300自动复位,中间轴210和接头座220自动被夹紧,使用安全。
32.一种机器人快换接头装置的操作方法,包括以下步骤:第一步、使用本发明时,将中间轴210和机器人连接,机器人爪手和接头座220下部固定连接,中间轴210卡在四个卡紧装置300中间,释放装置100放置在固定的位置;第二步、释放模式,机器任人携带接头装置200和卡紧装置300移动到本发明到释放装置100上部,然后从释放装置100上部开始往下移动,当接头座220下部和释放座110上部接触时,机器人停止移动,此时用手拉动把手122,齿圈120转动,齿圈120转动带动四个齿轮130同时转动,拉板132转动到横槽317重合的方位,转动螺栓150,螺栓150下部拧进横槽螺孔318中,此时机器人带动中间轴210往上移动, 中间轴210从四个卡块320中脱离,接头座220被固定螺栓150在当前位置不动;第三步、连接模式,机器人带动中间轴210移动到需要连接的爪手上部,机器人带动中间轴210往下移动,此时楔形槽212下部会插入卡块槽221中,卡块320会卡入对应楔形槽212中,此时机器人停止往下移动,此时拧开螺栓150,齿圈120在一号弹簧140作用下复位,机器人反向移动,机器人带动本发明往上移动,当本发明脱离和释放座110的接触后,四个卡紧装置300在四个二号弹簧230作用下复位,卡块320在三号弹簧330和二号弹簧230共同作用下卡紧在楔形槽212内部,本发明和机器人牢牢接触。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1