一种空中载人机器人及其控制方法与流程
本发明涉及智能机器人领域,具体为一种空中载人机器人及其控制方法。
背景技术:
1、现有的高空作业,如高空清洗作业,主要在载人的座椅上方悬挂保险绳,作业人员(蜘蛛人)通过一根保险绳把自己悬挂在几层、十几层、甚至几十层高的大楼外,从楼顶开始缓缓下滑,然后清洗楼层的玻璃和外墙,十分危险,且仅能在竖直方向的一列进行作业,要清洗整面幕墙,需要反复移动保险绳的位置,或者多人同时进行清洗。
2、公开号为:cn106917514a公开了一种蜘蛛人吊绳装置,虽然加装了安全装置,但是同样存在需要反复移动保险绳的位置进行清洗的问题。
技术实现思路
1、本发明的目的在于提供一种空中载人机器人及其控制方法,以实现在高空中稳定的载人,且可以将人移动至高空的各个位置上。本发明采用以下技术方案:
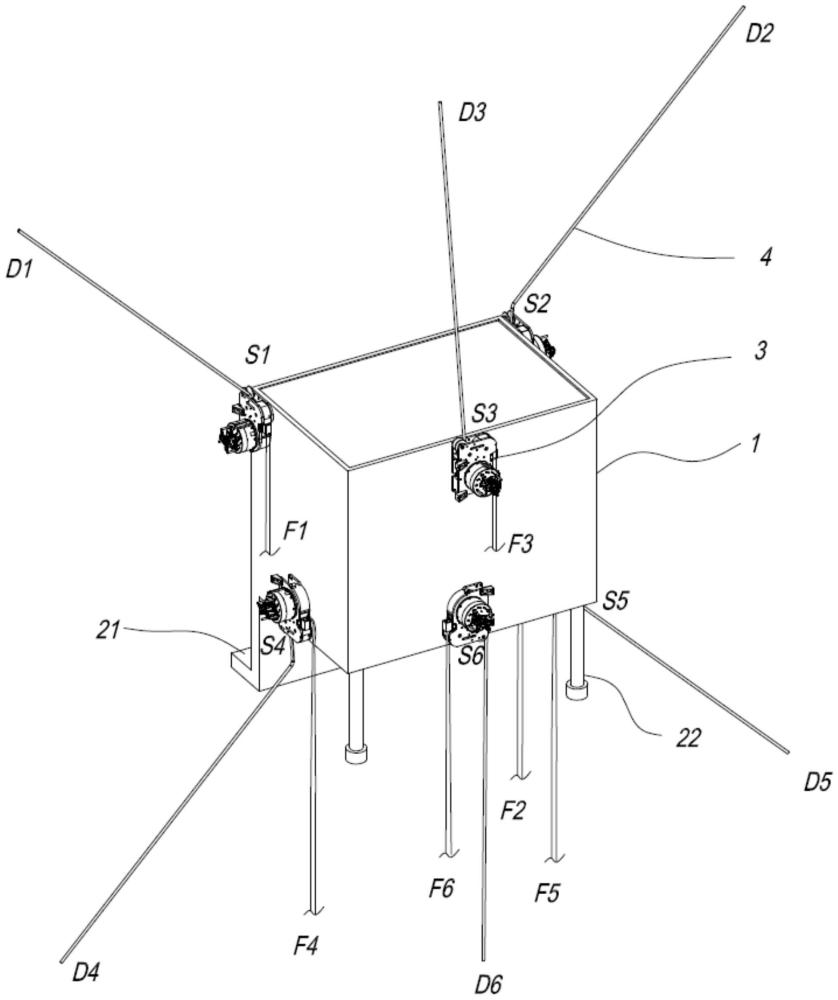
2、本发明公开了一种空中载人机器人,包括座椅,安装在座椅上的控制器、六组抓绳机及六组绳体,所述六组抓绳机包括三组上抓绳机及三组下抓绳机,所述三组上抓绳机安装在座椅上方,所述三组下抓绳机安装在座椅下方或者安装于地面上;且所述三组上抓绳机及三组下抓绳机的安装点位的连线为三角形;所述六组绳体与六组抓绳机一一对应连接,所述六组绳体包括三组天索绳以及三组地索绳,六组绳体均包括固定端和自由端;所述天索绳的固定端拉紧固定于建筑物上方,自由端穿过对应的上抓绳机并向下垂放。
3、所述三组下抓绳机安装在座椅下方时,所述地索绳的固定端拉紧固定于地面,自由端穿过对应的下抓绳机并向下垂放;所述三组下抓绳机安装于地面上时,所述地索绳的固定端拉紧固定于座椅下方,自由端穿过对应的下抓绳机。所述控制器控制抓绳机,使绳体在抓绳机上移动。
4、优选的,所述的三组上抓绳机为第一上抓绳机、第二上抓绳机和第三上抓绳机,对应的三组天索绳分别为第一天索绳、第二天索绳和第三天索绳;所述第一上抓绳机和第二上抓绳机位于座椅的上方两侧靠近墙面的内侧边,第三上抓绳机位于第一上抓绳机和第二上抓绳机的中心所在连线的远离墙面的外侧边。所述的三组下抓绳机为第一下抓绳机、第二下抓绳机和第三下抓绳机,对应的三组地索绳分别为第一地索绳、第二地索绳和第三地索绳;所述第一下抓绳机和第二下抓绳机位于座椅的下方两侧中部,第三下抓绳机位于第一下抓绳机和第二下抓绳机的中心所在连线的远离墙面的外侧边。通过设置三组上抓绳机,及三组下抓绳机的位置,使人可以坐于座椅上,且通过六组绳体保持座椅的平稳输送。
5、进一步的,所述座椅上安装有用于感应座椅姿态和坐标位置的传感器。所述坐椅下方靠近墙面的内侧边设置有搁脚板,远离墙面的外侧边设置有若干支撑脚,坐椅前面设有活动保险横杆。
6、本发明还公开了一种空中载人机器人的控制方法,采用上述的空中载人机器人,依照下列步骤进行控制:
7、s1.空中载人机器人的安装
8、使三组天索绳的固定端绑扎固定于建筑物上方,三组地索绳的固定端固定于地面上;将空中载人机器人安装在建筑墙面正面,建立坐标系及确定坐标原点。
9、s2.座椅姿态调整
10、各抓绳机工作,将座椅升高离地,调整座椅处于垂直状态,座椅水平;人入座后再次调整座椅水平。
11、s3.确定当前位置坐标
12、所述绳体与对应的抓绳机的进绳口为受力点,绳体在建筑物或地面上的固定端至受力点为拉紧段,测定空中载人机器人中心的当前位置坐标,根据中心的当前位置坐标计算六组绳体的受力点坐标。
13、s4.确定目标位置坐标
14、确定空中载人机器人中心的目标位置坐标,根据中心的目标位置坐标计算六组绳体的受力点坐标。
15、s5.根据目标位置的受力点坐标与当前位置的受力点坐标,计算得到六组绳体拉紧段的收放长度。
16、s6.控制器控制抓绳机,使六组绳体移动收放变化长度,座椅即移动至目标位置。
17、优选的,步骤s6中,根据六组绳体拉紧段的收放长度,计算在预定时间t内,各绳体的收放速度,控制各抓绳机按各自的收放速度移动绳体,座椅即移动至目标位置。
18、其中,所述的三组上抓绳机为第一上抓绳机、第二上抓绳机和第三上抓绳机,对应的三组天索绳分别为第一天索绳、第二天索绳和第三天索绳;所述第一上抓绳机和第二上抓绳机位于座椅的上方两侧靠近墙面的内侧边,第三上抓绳机位于第一上抓绳机和第二上抓绳的中心所在连线的远离墙面的外侧边;所述第一天索绳的一端为固定端,其固定于座椅横向移动范围的左上方,另一端穿过第一上抓绳机并自由下垂;所述第二天索绳的一端为固定端,其固定于座椅横向移动范围的右上方,另一端穿过第二上抓绳机并自由下垂;所述第三天索绳的一端为固定端,其固定于第一天索绳和第二天索绳的中间,另一端穿过第三上抓绳机并自由下垂。
19、所述三组下抓绳机为第一下抓绳机、第二下抓绳机和第三下抓绳机,对应三组地索绳分别为第一地索绳、第二地索绳和第三地索绳,所述第一下抓绳机和第二下抓绳机分别位于座椅下方两侧的中部,所述第一地索绳的一端为固定端,其固定在地面的左侧,另一端穿过第一下抓绳机并自由下垂;所述第二地索绳的一端为固定端,其固定在地面的右侧,另一端穿过第二下抓绳机并自由下垂;所述第三地索绳的一端为固定端,其固定于第一地索绳和第二地索绳的中间,另一端穿过第三下抓绳机。
20、其中,设定第一天索绳、第二天索绳及第三天索绳的固定端所在的竖直面为平面p,第一地索绳的固定端在平面p上的垂点为圆点o,第一天索绳和第二天索绳的连线的水平方向为x轴,竖直方向为y轴,垂直于x轴y轴的为z轴。
21、座椅在x轴的长度为a,在y轴的高度为c,在z轴的宽度为b,设定空中载人机器人中心的坐标为s0(x0,y0,z0),六组绳体的受力点坐标为sn(xn,yn,zn),n=1~6,则六组绳体的受力点坐标通过中心的坐标计算,分别为s1(x0-0.5a,y0+0.5c,z0-0.5b),s2(x0+0.5a,y0+0.5c,z0-0.5b),s3(x0,y0+0.5c,z0+0.5b),s4(x0-0.5a,y0-0.5c,z0),s5(x0+0.5a,y0-0.5c,z0),s6(x0,y0-0.5c,z0+0.5b)。
22、进一步的,将第一天索绳固定端与第一地索绳固定端设置于同一个竖直面上,第二天索绳固定端与第二地索绳固定端设置于同一个竖直面上,第一天索绳与第二天索绳的水平距离为b,第一天索绳固定端至第一地索绳固定端的距离为h,则:则六组绳体的拉紧段长度的计算公式如下:
23、第一天索绳拉紧段长度:
24、第二天索绳拉紧段长度:
25、第三天索绳拉紧段长度:
26、第一地索绳拉紧段长度:
27、第二地索绳拉紧段长度:
28、第三地索绳拉紧段长度:
29、进一步的,计算当前的位置坐标至目标位置坐标的第一拉紧段、第二拉紧段、第三拉紧段、第四拉紧段、第五拉紧段及第六拉紧段的差值,分别为△l1、△l2、△l3、△l4、△l5、△l6,差值为正值为收紧绳体,差值为负值为放松绳体,预设空中载人机器人移动的时间为t,则六组绳体的收放速度分别为:v1=△l1/t,v2=△l2/t,v3=△l3/t,v4=△l4/t,v5=△l5/t,v6=△l6/t。
30、由于采用了上述结构,本发明具有以下有益效果:本发明通过设置六组受力绳体,三组天索绳的固定端设置于建筑物上方,三组地索绳固定于地面,通过控制六组绳体的拉紧段的收放,只需在作业前固定好六根绳体的固定端,可实现空中载人机器人在整个工作面区域内任意位置的移动,实现便捷的空中载人。通过设置六组绳体,可保证座椅的直立,防止座椅发生倾覆,平稳性高。
- 还没有人留言评论。精彩留言会获得点赞!