机械臂用定位基座的制作方法
1.本技术涉及机械臂基座技术领域,具体涉及机械臂用定位基座。
背景技术:
2.机械臂是指高精度,多输入多输出、高度非线性、强耦合的复杂系统。因其独特的操作灵活性,已在工业装配、安全防爆等领域得到广泛应用。
3.现有的机械臂一般是安装在对应的安装座上,再通过螺栓将机械臂安装在安装座上,起到对机械臂的定位支撑作用。但是现有的机械臂安装在定位基座后,在需要对机械臂进行检修或是转移工位时,则需要将机械臂以及定位基座上的螺栓拆卸,然后使用行车将机械臂吊起,然后再将吊起的机械臂放置在液压推车上进行转移,而机械臂使用行车吊起时,机械臂在吊起时容易出现晃动造成意外磕碰,存在造成机械臂受损的风险,具有一定的不足,因此本技术针对安装座进行改进,提出机械臂用定位基座。
技术实现要素:
4.本技术的目的在于:为解决上述背景中所提出的问题,本技术提供了机械臂用定位基座。
5.本技术为了实现上述目的具体采用以下技术方案:
6.机械臂用定位基座,包括内部为中空的安装座,所述安装座底部构造有四个呈矩形分布的凹槽,所述凹槽内竖直转动安装有转动架,所述转动架上安装有滚轮,所述安装座上竖直滑动安装有滑动架,所述滑动架与所述转动架之间安装有联动组件,当所述滑动架移动时,通过所述联动组件以使多个所述转动架同步向远离或靠近对应所述凹槽的方向移动,所述安装座上滑动安装有滑动部,所述滑动部与所述滑动架之间安装有传动部,当所述滑动部移动时,通过所述传动部以使所述滑动架竖直向移动。
7.进一步地,所述联动组件包括对称且水平滑动安装在所述滑动架上的四个滑动杆,所述滑动杆的自由端铰接有连动杆,所述连动杆倾斜向下滑动安装在所述安装座内,所述转动架内构造有连接凸板,所述连接凸板沿其长度方向开设有滑动槽,所述连动杆的自由端构造有凸杆,所述凸杆位于所述滑动槽内且与所述滑动槽滑动相切。
8.进一步地,所述滑动部包括竖直滑动安装在所述安装座上的脚踏板,所述安装座对称且竖直构造有导向杆,多个所述导向杆竖直穿过所述脚踏板且顶部构造有限位块,所述安装座与所述导向杆之间安装有复位弹簧,所述传动部作用于所述脚踏板。
9.进一步地,所述传动部包括构造在所述安装座内连接座,所述连接座顶端竖直构造有连接筒,所述连接座上竖直构造有安装筒,所述安装筒顶部竖直滑动安装有液压杆,所述连接座内构造有与所述连接筒连通的储油腔,所述连接座与所述连接筒连通处安装有第一单向阀,所述连接座上构造有位于所述储油腔下方的通油腔,所述通油腔与所述安装筒连通,所述连接筒底部与通油腔连通且连通处安装有第二单向阀,所述储油腔与所述通油腔之间安装有泄压阀,所述连接筒上竖直安装有驱动油杆,所述驱动油杆与所述脚踏板连
接,所述液压杆的顶端位于外部且与所述滑动架之间安装有翻转件,当所述液压杆竖直向上移动时,通过所述翻转件以使所述滑动架竖直向下移动。
10.进一步地,所述翻转件包括转动安装在所述安装座上的驱动齿轮,所述滑动架与所述液压杆上均竖直安装有驱动齿条,两个所述驱动齿条相互平行且均与所述驱动齿轮啮合。
11.进一步地,所述连接座上竖直转动安装有转动杆,所述转动杆自由端铰接有驱动杆,所述驱动杆的一侧与所述驱动油杆的顶端铰接,所述驱动杆的自由端构造有连接板,所述连接板上开设有活动槽,所述脚踏板上水平构造有与所述活动槽滑动相切的柱杆。
12.进一步地,所述安装座外侧圆形阵列且竖直转动安装有支撑杆,所述支撑杆的自由端构造有与地面接触的支撑板,所述支撑杆与所述滑动架之间安装有连动部,当所述滑动架向下移动时,通过所述连动部以使多个所述支撑杆同步向上转动。
13.进一步地,所述连动部包括构造在所述支撑杆上的传导杆,所述传导杆的一端位于所述安装座内且铰接有传动杆,所述传动杆的自由端铰接在所述滑动架上。
14.进一步地,所述支撑杆包括竖直转动安装在所述安装座上的支撑主杆,所述支撑主杆的自由端开设有插接槽,还包括支撑副杆,所述支撑副杆的一端构造有插设至所述插接槽的插接杆,所述支撑板与所述支撑副杆的一端连接,所述支撑主杆上安装有用于将所述插接杆接触固定或固定在所述插接槽内的锁定件。
15.进一步地,所述锁定件包括转动安装在所述支撑主杆上的螺纹杆,所述支撑主杆上滑动安装有驱动块,所述驱动块螺纹套设在所述螺纹杆上且铰接有连杆,所述支撑主杆上竖直转动安装有锁紧板,所述锁紧板的自由端构造有弧形插板,所述插接杆的一侧开设有供所述弧形插板插设的弧形插槽。
16.本技术的有益效果如下:
17.1、本技术与现有技术相比,通过移动滑动部配合传动部使得滑动架移动,而滑动架在移动时通过联动组件会使得转动架转动,从而实现多个滚轮分别移动到穿槽外部,从而将安装座顶起,方便对安装座的移动,因此具有创造性。
18.2、本技术脚踏板的设计使得工作人员只需要脚踩脚踏板,配合传动部即可使得转动架向下移动,且通过传动部还可以使得位于外部的滚轮随着转动架的转动至对应的凹槽内,不需要额外使用电力驱动件,而且采用脚踩的方式可以使得工作人员更加容易施力。
19.3、本技术翻转件的设计可以使得安装筒与液压杆之间和连接筒与驱动油杆的接触面不容易出现渗油的情况,防止液压油泄漏。
附图说明
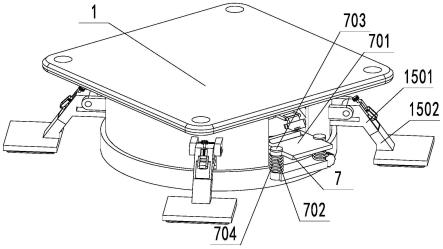
20.图1是本技术立体结构示意图;
21.图2是本技术使用时立体结构示意图;
22.图3是本技术图1局部立体剖视图;
23.图4是本技术图1中另一局部立体示意图;
24.图5是本技术图1中立体半剖示意图;
25.图6是本技术图1中又一局部立体剖视图;
26.图7是本技术图3中a处结构放大图;
27.图8是本技术图4中b处结构放大图;
28.图9是本技术图5中c处结构放大图;
29.图10是本技术图6中d处结构放大图;
30.附图标记:1、安装座;2、凹槽;3、转动架;4、滚轮;5、滑动架;6、联动组件;601、滑动杆;602、连动杆;603、连接凸板;604、滑动槽;605、凸杆;7、滑动部;701、脚踏板;702、导向杆;703、限位块;704、复位弹簧;8、传动部;801、连接座;802、连接筒;803、安装筒;804、液压杆;805、储油腔;806、第一单向阀;807、通油腔;808、第二单向阀;809、泄压阀;8010、驱动油杆;9、翻转件;901、驱动齿轮;902、驱动齿条;10、转动杆;11、驱动杆;12、连接板;13、活动槽;14、柱杆;15、支撑杆;1501、支撑主杆;1502、支撑副杆;16、支撑板;17、连动部;1701、传导杆;18、传动杆;19、锁定件;1901、螺纹杆;1902、驱动块;1903、连杆;1904、锁紧板;1905、弧形插板;1906、弧形插槽;20、插接槽;21、插接杆。
具体实施方式
31.为使本技术实施例的目的、技术方案和优点更加清楚,下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述。
32.如图1-图10所示,本技术一个实施例提出机械臂用定位基座,包括内部为中空的安装座1,安装座1底部构造有四个呈矩形分布的凹槽2,凹槽2内竖直转动安装有转动架3,转动架3上安装有滚轮4,安装座1上竖直滑动安装有滑动架5,滑动架5与转动架3之间安装有联动组件6,当滑动架5移动时,通过联动组件6以使多个转动架3同步向远离或靠近对应凹槽2的方向移动,安装座1上滑动安装有滑动部7,滑动部7与滑动架5之间安装有传动部8,当滑动部7移动时,通过传动部8以使滑动架5竖直向移动,在使用时,需要将机械臂安装在安装座1上,通过螺栓将机械臂固定在安装座1的顶部,当需要将机械臂移动时,此时的转动架3位于凹槽2内,移动滑动部7,滑动部7移动通过传动部8会使得滑动架5移动,滑动架5在移动的过程中通过联动组件6会使得多个转动架3向凹槽2外移动,从而使得多个滚轮4同时与地面接触,此时滑动部7继续移动会使得转动架3继续转动,从而使得多个滚轮4将安装座1顶起,以使得四个滚轮4与地面接触,安装座1处于悬空状态,从而方便工作人员对安装座1进行移动,不需要使用行车以及液压推车对机械臂进行转移,从而减小因为起吊机械臂导致机械臂出现磕碰以及损坏的可能性,当安装座1移动到对应的位置后,此时移动滑动部7,滑动部7移动通过传动部8使得滑动架5移动,从而使得多个转动架3向对应的凹槽2内移动,以使得滚轮4向凹槽2内转动收纳,需要说明的是,滚轮4呈矩形分布,两个外周侧相对的滚轮4处于相互靠近移动的状态,从而使得四个滚轮4向着自身的滚动方向转动到对应的凹槽2内,与现有技术相比,通过移动滑动部7配合传动部8使得滑动架5移动,而滑动架5在移动时通过联动组件6会使得转动架3转动,从而实现多个滚轮4分别移动到穿槽外部,从而将安装座1顶起,方便对安装座1的移动,减少了相关设备的投入使用。
33.如图3、图4和图7所示,在一些实施例中,联动组件6包括对称且水平滑动安装在滑动架5上的四个滑动杆601,滑动杆601的自由端铰接有连动杆602,连动杆602倾斜向下滑动安装在安装座1内,如图7所示,为连动杆602的倾斜方向,转动架3内构造有连接凸板603,连接凸板603沿其长度方向开设有滑动槽604,连动杆602的自由端构造有凸杆605,凸杆605位于滑动槽604内且与滑动槽604滑动相切,也就是说,当滑动架5竖直向下移动时会带动滑动
杆601向下移动,因为滑动杆601与连动杆602铰接,所以当滑动架5向下移动时会带动连动杆602向下移动,从而使得连动杆602向对应的凹槽2内移动,此时滑动杆601则因为连动杆602向下移动,迫使连动杆602向靠近对应的转动架3方向移动,连动杆602移动间接的带动凸杆605向对应凹槽2的方向移动,因为凸杆605与滑动槽604滑动相切,所以凸杆605倾斜向下移动,相对于连接凸板603,凸杆605会沿着滑动槽604的长度方向移动且凸杆605会沿自身转动,此时的转动架3会迎合凸杆605的移动而向远离凹槽2的方向移动,从而实现滚轮4转动至凹槽2外,需要说明的时,滑动相切指的时凸杆605位于滑动槽604内且与滑动槽604长度方向的一侧相切,当转动架3转动时,相对于连接凸板603,凸杆605会沿着滑动槽604的方向移动且沿自身轴线转动以迎合转动架3的转动,通过四个滑动杆601使得四个连动杆602同时移动,在通过滑动槽604以及凸杆605的滑动配合以实现多个转动架3同时移动,以使四个转动架3可以同步移动,以保证四个滚轮4可以同时撑起安装座1。
34.如图1、图2和图5所示,在一些实施例中,滑动部7包括竖直滑动安装在安装座1上的脚踏板701,安装座1对称且竖直构造有导向杆702,多个导向杆702竖直穿过脚踏板701且顶部构造有限位块703,安装座1与导向杆702之间安装有复位弹簧704,优选的,复位弹簧704套设在导向杆702上,可以防止复位弹簧704出现折弯现象,传动部8作用于脚踏板701,也就是说,当往复脚踩脚踏板701时,通过传动部8可以使得滑动架5竖直向下移动,滑动架5向下移动以实现多个滑动杆601向下移动,从而使得多个转动架3向远离对应凹槽2的方向移动,脚踏板701的设计使得工作人员只需要脚踩脚踏板701,配合传动部8即可使得转动架3向下移动,且通过传动部8还可以使得位于外部的滚轮4随着转动架3的转动至对应的凹槽2内,不需要额外使用电力驱动件,而且采用脚踩的方式可以使得工作人员更加容易施力。
35.如图1、图6、图8和图10所示,在一些实施例中,传动部8包括构造在安装座1内连接座801,连接座801顶端竖直构造有连接筒802,连接座801上竖直构造有安装筒803,安装筒803顶部竖直滑动安装有液压杆804,连接座801内构造有与连接筒802连通的储油腔805,连接座801与连接筒802连通处安装有第一单向阀806,连接座801上构造有位于储油腔805下方的通油腔807,通油腔807与安装筒803连通,连接筒802底部与通油腔807连通且连通处安装有第二单向阀808,储油腔805与通油腔807之间安装有泄压阀809,连接筒802上竖直安装有驱动油杆8010,驱动油杆8010与脚踏板701连接,液压杆804的顶端位于外部且与滑动架5之间安装有翻转件9,当液压杆804竖直向上移动时,通过翻转件9以使滑动架5竖直向下移动,优选的,连接筒802的内部直径小于安装筒803内部的直径,使得工作人员向下踩动脚踏板701时,脚踏板701向下移动挤压复位弹簧704,从而间接的使得驱动油杆8010向下移动,驱动油杆8010向下移动使得连接筒802内的液压油进入穿过第二单向阀808进入到通油腔807内(此时的第一单向阀806使得连接筒802内的液压油不会进入到储油腔805内),从而使得液压油进入到安装筒803内,此时的第二单向阀808会使得通油腔807内的液压油不会进入到连接筒802内,所以通过油压会将液压杆804顶起,从而使得液压杆804向上移动,此时工作人员松开脚通过复位弹簧704使得脚踏板701复位,从而间接的使得驱动油杆8010向上移动,然后再次向下踩动脚踏板701,以此反复踩踏从而使得液压杆804向上移动,再配合翻转件9使得滑动架5向下移动,从而实现多个转动架3同步向远离对应的凹槽2方向移动,当需要转动架3转动到对应的凹槽2内时,只需要将通过泄压阀809使得通油腔807与储油腔805相连通,此时因为连接座801重力的作用会使得滚轮4打滑,从而使得转动架3向对应的
凹槽2内移动,从而使得滑动架5向上移动,通过翻转件9使得液压杆804向下移动,从而通过液压杆804向下的压力使得通油腔807内部的液压油进入到储油腔805内,然后关闭泄压阀809即可,从而实现控制安装座1的顶起以及放置,翻转件9的设计可以使得安装筒803与液压杆804之间和连接筒802与驱动油杆8010的接触面不容易出现渗油的情况,防止液压油泄漏,需要说明的是,连接筒802以及安装筒803分别安装有保证密封性的密封圈,液压杆804与驱动油杆8010均与对应的密封圈紧密贴合,通过控制液压油的流向实现用较小的驱动力获得更大的动力,工作人员脚踩脚踏板701时更加的省力,如图10所示,泄压阀809的操作杆与安装座1之间安装有锥齿轮组件(两个相互啮合的锥齿轮),转动安装在安装座1上的锥齿轮的一端构造有位于连接座801一侧的调节杆,方便工作人员转动泄压阀809。
36.如图2和图4所示,在一些实施例中,翻转件9包括转动安装在安装座1上的驱动齿轮901,滑动架5与液压杆804上均竖直安装有驱动齿条902,两个驱动齿条902相互平行且均与驱动齿轮901啮合,也就是说,驱动齿轮901位于两个驱动齿条902之间,当液压杆804竖直向上移动时会带动与其连接的驱动齿条902向上移动,从而带动驱动齿轮901转动,驱动齿轮901在转动的过程中会带动安装在滑动架5上的驱动齿条902向下移动。
37.如图1和图8所示,在一些实施例中,连接座801上竖直转动安装有转动杆10,转动杆10自由端铰接有驱动杆11,驱动杆11的一侧与驱动油杆8010的顶端铰接,驱动杆11的自由端构造有连接板12,连接板12上开设有活动槽13,脚踏板701上水平构造有与活动槽13滑动相切的柱杆14,也就是说,脚踩脚踏板701时,脚踏板701向下移动会使得柱杆14向下移动,因为柱杆14与活动槽13滑动相切,所以柱杆14移动会迫使驱动杆11向下转动,驱动杆11向下转动使得驱动油杆8010向下移动,这里采用的是杠杆原理,使得工作人员脚踩脚踏板701时更加的省力,减轻工作人员的劳动强度。
38.如图1、图2、图5和图8所示,在一些实施例中,安装座1外侧圆形阵列且竖直转动安装有支撑杆15,支撑杆15的自由端构造有与地面接触的支撑板16,支撑杆15与滑动架5之间安装有连动部17,当滑动架5向下移动时,通过连动部17以使多个支撑杆15同步向上转动,由上文解释可知,滑动架5向下移动时,也就代表四个滚轮4会将连接座801顶起,此时的支撑杆15则向上转动不与地面接触,而当滑动架5向上移动时,通过连动部17会使得支撑杆15向下转动,使得滚轮4位于凹槽2内时,多个支撑板16与地面接触起到了增大支撑面积的效果,使得机械臂在工作时连接座801更加的稳定,不容易出现晃动,且不需要额外使用电力驱动件来带动支撑杆15转动,提高了适用性。
39.如图1、图8和图9所示,在一些实施例中,连动部17包括构造在支撑杆15上的传导杆1701,传导杆1701的一端位于安装座1内且铰接有传动杆18,传动杆18的自由端铰接在滑动架5上,当滑动架5上下移动时会带动传动杆18移动,因为传动杆18与传导杆1701铰接,所以当滑动架5向上移动时通过传动杆18的拉动会使得支撑板16与地面接触,从而起到扩大支撑面积的作用,优选的,支撑杆15的数量为四个。
40.如图1、图3和图9所示,在一些实施例中,支撑杆15包括竖直转动安装在安装座1上的支撑主杆1501,传导杆1701构造在支撑主杆1501上,支撑主杆1501的自由端开设有插接槽20,还包括支撑副杆1502,支撑副杆1502的一端构造有插设至插接槽20的插接杆21,支撑板16与支撑副杆1502的一端连接,支撑板16的底部安装有橡胶垫,防止地面不平导致其中一个或多个支撑板16底部不能完全与地面接触,支撑主杆1501上安装有用于将插接杆21接
触固定或固定在插接槽20内的锁定件19,当其中一个支撑板16出现损坏时,可以通过锁定件19解除插接杆21与插接槽20的固定,如图9所示,此时的插接杆21可以直接从插接槽20内抽出,从而方便更换支撑板16。
41.如图1和图9所示,在一些实施例中,锁定件19包括转动安装在支撑主杆1501上的螺纹杆1901,支撑主杆1501上滑动安装有驱动块1902,驱动块1902螺纹套设在螺纹杆1901上且铰接有连杆1903,支撑主杆1501上竖直转动安装有锁紧板1904,锁紧板1904的自由端构造有弧形插板1905,插接杆21的一侧开设有供弧形插板1905插设的弧形插槽1906,当需要拆卸支撑副杆1502时,此时只需要转动螺纹杆1901,螺纹杆1901的一端安装有旋钮,螺纹杆1901转动带动与其螺纹配合的驱动块1902移动,驱动块1902移动带动铰接在驱动块1902上的连杆1903移动,因为连杆1903的一端铰接在锁紧板1904上,所以驱动块1902的移动通过连杆1903的拉动会使得锁紧板1904转动,从而实现弧形插板1905脱离对应的弧形插槽1906,然后只需要直接将支撑副杆1502抽出即可。
42.对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本技术。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本技术的精神或范围的情况下,在其它实施例中实现。因此,本技术将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1