一种仿生人工肌肉及仿生机器人的制作方法
1.本发明涉及人工肌肉技术领域,具体涉及一种仿生人工肌肉及仿生机器人。
背景技术:
2.仿生人工肌肉是一种新型智能柔性材料,可在外界刺激条件下(如电、磁、温度、光、力、湿度等)产生伸缩、膨胀、弯曲、扭转等运动并对外做功,在类人机器人、生物医疗、航空航天等领域具有重要的应用价值。生物肌肉的致动来源于肌原纤维的收缩,由蛋白质分子马达提供的分布式动力实现肌丝间整体相对滑移运动,是一个多时空尺度的动力学过程,其中存在着随机性、非线性等复杂特征,要全面地理解其跨尺度结构与功能的关联,尤其是建立生物肌肉中单根肌原纤维的致动机制和动力学特性的定量物理模型,还存在着巨大的挑战。
3.公告号为cn104196816b的专利说明书中公开了一种以气体作为工作介质的人工肌肉,一个具有缸筒活塞机构的阻尼收缩单元与一个弹性单元构成串联装置,阻尼收缩单元和弹性单元的总长度受拉力和工作气压的控制,不受其它约束;所述阻尼收缩单元设置为:后端盖和中端盖与缸筒通过螺纹密封连接,与活塞通过螺纹连接的活塞杆贯穿中端盖,在中端盖上设置进气接头安装孔;在后端盖上设置排气口;所述弹性单元的结构设置为:在所述活塞杆的内部有空腔,其另一端与前端盖螺纹连接并穿过中端盖;在所述活塞杆中设置弹簧,弹簧的一端与活塞杆内的圆螺母固定连接,另一端连接导杆;所述导杆穿过前端盖并在位于活塞杆外部杆端连接第一拉环,在后端盖上通过固定支架设置第二拉环。
4.公开号为cn111360803a的专利说明书中公开了一种电磁人工肌肉,以单束肌纤维为构成单元,单束肌纤维包括若干电磁铁、导磁橡胶和磁性液体,所述的导磁橡胶为空心圆柱状结构,若干电磁铁均等间距设置在导磁橡胶内,若干电磁铁与导磁橡胶同轴布置,若干电磁铁和导磁橡胶的内壁固定连接,每相邻两个电磁铁及相邻两个电磁铁之间的导磁橡胶均围成一腔室,在所有的腔室内均注入磁性液体,所述的电磁铁包括线圈和磁芯,所述线圈缠绕在磁芯上,所述的磁性液体为由磁性固体颗粒、基载液和界面活性剂混合而成的胶状液体,相邻的两个电磁铁、两个电磁铁之间的导磁橡胶及两个电磁铁之间的磁性液体构成肌节单元;向磁芯上的线圈通电,电磁铁极化,磁性液体和导磁橡胶极化,相邻的电磁铁端部磁极相同或相反,每一肌节单元伸长或收缩,从而使单束肌纤维伸长或收缩。
5.上述仿生人工肌肉的设计只能模仿人体肌肉的一个或数个特征,并在应力-应变、响应速度、功率密度、能量效率、直驱能力、生命周期等性能指标上达到一定要求。目前能够同时实现类似生物肌肉在力密度、功率密度、峰值应变、带宽、低成本、循环寿命和效率等方面综合性能的仿生人工肌肉尚未实现,基于生物肌肉的分布式动力、多时空尺度的仿生肌肉结构也没有成熟的报道。
技术实现要素:
6.本发明的一个目的在于提供一种仿生人工肌肉,能高度还原生物肌肉的结构特
征,有效再现生物肌肉的优异综合性能。
7.一种仿生人工肌肉,包括中心轴以及围绕所述中心轴设置的运动副,所述运动副朝向所述中心轴的一侧上设置有均匀分布的球窝触点,所述中心轴朝向所述运动副的一侧上设置有至少一组交替动作且能沿所述中心轴长度方向以及垂直所述中心轴方向移动的连杆,所述连杆沿垂直所述中心轴方向移动时,所述连杆靠近所述运动副的端部能伸入所述球窝触点内。
8.本方案通过交替动作的连杆来驱动运动副动作,连杆可以沿垂直所述中心轴方向移动,移动范围与球窝触点的深度相匹配,可以沿所述中心轴长度方向做往复运动,运动范围与球窝触点的距离相匹配。
9.连杆依次与对应的球窝触点接触与离开,接触的连杆带动运动副运动,离开的连杆移动至下一个球窝触点后接触,从而实现运动副的步进功能。
10.作为优选,所述中心轴上对应每个所述连杆位置设置有用于驱动所述连杆沿所述中心轴长度方向移动的驱动器;
11.所述连杆为伸缩杆结构,所述连杆靠近所述运动副的端部上设置有线圈,所述中心轴内设置有为所述线圈通电的电路,所述球窝触点内带有磁性。
12.本方案中,驱动器可采用直线驱动机构,连接的一端固定在直线驱动机构的活动端上;线圈尺寸与球窝触点匹配,可以通过电流方向控制磁场方向,从而与球窝触点相吸配合或相斥分离。
13.作为优选,沿所述中心轴长度方向设置有多组所述运动副,相邻组位于一条直线上的所述运动副首尾相连。
14.作为优选,所述中心轴设置有多个且相互平行。
15.上述方案通过串联获得长距离行程,通过并联获得高功率输出,通过串联并联获得长距离高功率输出。
16.作为优选,所述球窝触点内布置有铁磁性金属材料。
17.作为优选,所述中心轴和运动副的材质为聚乙烯纤维,所述连杆的材质为树脂。
18.作为优选,所述中心轴、运动副与连杆通过3d打印技术制作。
19.本发明的另一目的在于提供一种仿生机器人,包含上述仿生人工肌肉。
20.本发明的有益效果:
21.(1)分布式动力,结构紧凑,质量轻,适合微型化应用场景。
22.(2)可三维叠加,将分布式动力的微小位移和力累加,实现加和效果,方便获得高频大位移运动特性。
23.(3)结构连接有一定的弹性余量,容错率高;高度还原生物肌肉的结构特征,有效再现生物肌肉的优异性能。
附图说明
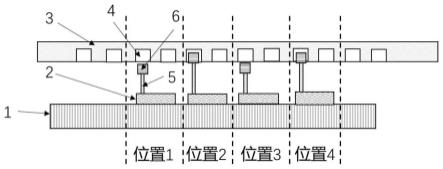
24.图1为本发明仿生人工肌肉实施例1的一种动作状态示意图;
25.图2为本发明仿生人工肌肉实施例1的另一种动作状态示意图;
26.图3为本发明仿生人工肌肉实施例1的再一种动作状态示意图;
27.图4为本发明仿生人工肌肉实施例2的结构示意图;
28.图5为本发明仿生人工肌肉实施例3的结构示意图;
29.图中:1、中心轴,2、驱动器,3、运动副,4、球窝触点,5、连杆,6、线圈。
具体实施方式
30.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
31.实施例1
32.如图1-3所示,一种仿生人工肌肉,包括固定的中心轴1以及围绕中心轴1设置的运动副3;中心轴1作为固定组件保证仿生结构整体的稳定,并为其他组件提供固定点位,其内部设有电路;运动副3朝向中心轴1的一侧上设置有均匀分布的球窝触点4,球窝触点4内布置有铁磁性金属材料使得球窝触点4内带有磁性。
33.运动副3上相邻两个球窝触点4的间距为一个驱动行程,中心轴1朝向运动副3的一侧上设置有两组驱动器2,驱动器2具体可采用齿轮齿条直线驱动机构或滚珠丝杠直线驱动机构,驱动器2的活动端上设置有连杆5,连杆5具体垂直中心轴1设置,驱动器2可以驱动连杆5在一个驱动行程内沿中心轴1长度方向往复运动。
34.连杆5靠近运动副3的端部上设置有微型线圈6,磁力大小和极性方向由电流大小和方向控制。本实施例中,连杆5为伸缩杆结构,通过控制线圈6的极性从而与球窝触点4相吸配合或相斥分离;相吸配合时驱动连杆5伸展,相斥分离时驱动连杆5收缩;连杆5沿垂直中心轴1方向移动的移动范围与球窝触点4的深度相匹配。
35.本实施例中,需保证相邻连杆5上的线圈6极性相反,以实现连杆5的交替伸缩,保证始终有线圈6与球窝触点4接触,从而保持运动副3的位置。
36.本实施例中,中心轴1和运动副3的材质为聚乙烯纤维,连杆5的材质为树脂。
37.本实施例中,中心轴1、运动副3与连杆5通过3d打印技术制作。
38.本实施例的运动过程及原理如下:
39.通过电流方向控制微型线圈6的磁性方向,使位置1和位置3的微型线圈6的极性与球窝触点4的极性相同,相斥驱动对应的连杆5脱离球窝触点4;使位置2和位置4的微型线圈6极性与球窝触点4的极性相反,相吸驱动对应的连杆5与球窝触点4结合,如图1所示。
40.随后,位置2和位置4的驱动器2带动对应的连杆5右移,连杆5带动运动副3右移,移动距离为相邻球窝触点4的间距,如图2所示。
41.移动到位后,通过电流方向控制微型线圈6的磁性方向,使位置2和位置4的连杆5在磁性斥力的作用下离开对应的球窝触点4,并在驱动器2的作用下左移至临近球窝触点4的下方;使位置1和位置3的微型线圈6在磁性吸力的作用下进入上方对应的球窝触点4,如图3所示;在驱动器2的作用下通过对应的连杆5带动运动副3移动。
42.上述过程循序进行即可实现运动副的定向移动,上述步骤反向进行即可实现运动副的反向移动。
43.实施例2
44.如图4所示,本实施例与实施例1相比区别在于:围绕仿生人工肌肉的中心轴1设置
有两组运动副3,两组运动副3沿中心轴1长度方向设置,每组运动副3包含一对运动副3,运动副3上的球窝触点4均朝向中心轴1,相邻组位于一条直线上的运动副3首尾相连,实现结构的串联,最终实现运动副运动距离的叠加。
45.本实施例的工作过程与实施例1相似,通过电流方向控制微型线圈6的磁性方向,使两组运动副3的位置1和位置3的微型线圈6的极性与球窝触点4的极性相同,相斥驱动对应的连杆5脱离球窝触点4;使位置2和位置4的微型线圈6极性与球窝触点4的极性相反,相吸驱动对应的连杆5与球窝触点4结合。
46.随后,位置2和位置4的驱动器2带动对应的连杆5右移,连杆5带动运动副3右移,移动距离为相邻球窝触点4的间距。
47.移动到位后,通过电流方向控制微型线圈6的磁性方向,使位置2和位置4的连杆5在磁性斥力的作用下离开对应的球窝触点4,并在驱动器2的作用下左移至临近球窝触点4的下方;使位置1和位置3的微型线圈6在磁性吸力的作用下进入上方对应的球窝触点4,如图3所示;在驱动器2的作用下通过对应的连杆5带动运动副3移动。
48.本实施例也可设置超过两组运动副3,两组运动副3可包含多对。
49.实施例3
50.如图5所示,本实施例在实施例2的基础上增加了一个中心轴1,两中心轴1平行设置,实现结构的并联,最终实现运动距离叠加的同时,实现动力的叠加。
51.本实施例的工作过程与实施例2相似,通过电流方向控制微型线圈6的磁性方向,使每组运动副3上位置1和位置3的微型线圈6的极性与球窝触点4的极性相同,相斥驱动对应的连杆5脱离球窝触点4;使位置2和位置4的微型线圈6极性与球窝触点4的极性相反,相吸驱动对应的连杆5与球窝触点4结合。
52.随后,位置2和位置4的驱动器2带动对应的连杆5右移,连杆5带动运动副3右移,移动距离为相邻球窝触点4的间距。
53.移动到位后,通过电流方向控制微型线圈6的磁性方向,使位置2和位置4的连杆5在磁性斥力的作用下离开对应的球窝触点4,并在驱动器2的作用下左移至临近球窝触点4的下方;使位置1和位置3的微型线圈6在磁性吸力的作用下进入上方对应的球窝触点4,如图3所示;在驱动器2的作用下通过对应的连杆5带动运动副3移动。
54.本发明仿生人工肌肉可以通过累计步进效果来实现运动副的高频移动,并可以通过串联获得长距离行程,通过并联获得高功率输出,通过串联并联获得长距离高功率输出,高度还原生物肌肉的结构特征,有效再现生物肌肉的优异性能。
55.一种仿生机器人,包含上述的仿生人工肌肉,其结构已详细阐述,此处不在赘述
56.尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1